MKM 311 Sistem Dinamiği ve Kontrol Birim Basamak Yanıtı ve Zaman Tanım Bölgesi Kriterleri Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
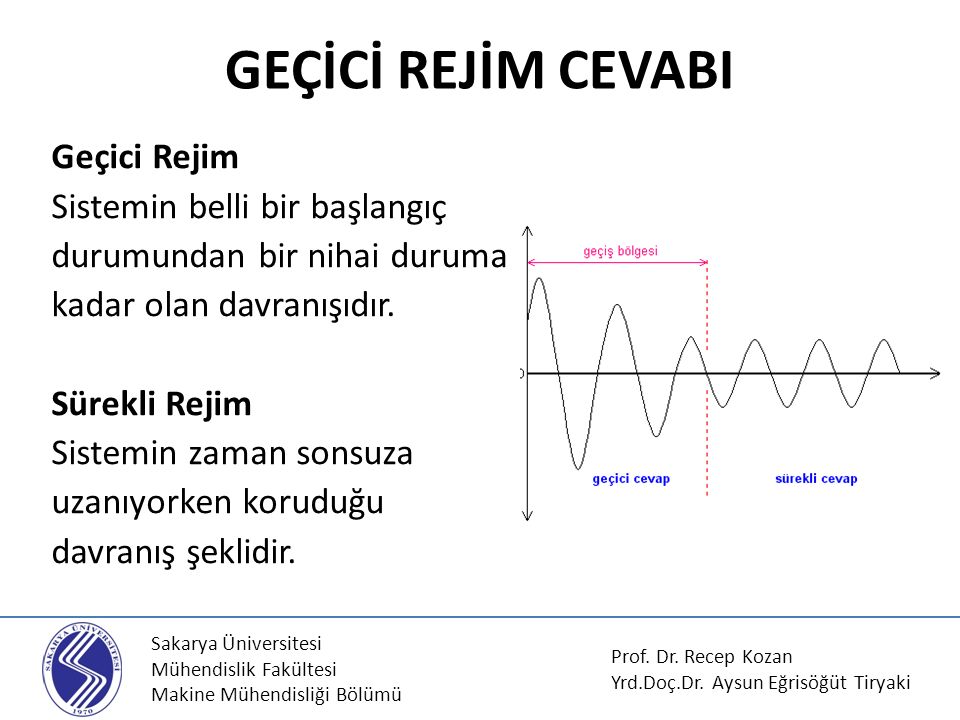
GEÇİCİ REJİM CEVABI Geçici Rejim Sistemin belli bir başlangıç durumundan bir nihai duruma kadar olan davranışıdır. Sürekli Rejim Sistemin zaman sonsuza uzanıyorken koruduğu davranış şeklidir. Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
GEÇİCİ REJİM CEVABI Bir sistemin cevabı (davranış şekli) hem o sistemin transfer fonksiyonuna hem de giriş fonksiyonuna bağlıdır. Lineer veya belirli bir çalışma noktası civarında lineerleştirilmiş sistemlerin transfer fonksiyonları Orantı elemanı tipinde; T.F.=K=sabit Kapasite elemanı tipinde; T.F.= 1 𝐶𝑠 Zaman sabiti elemanı tipinde T.F.= 1 𝜏𝑠+1 Titreşim elemanı tipinde T.F.= 𝜔 𝑛 2 𝑠 2 +2𝜁 𝜔 𝑛 𝑠+ 𝜔 𝑛 2 Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
GEÇİCİ REJİM CEVABI Transfer fonksiyonları, tanımlanan dört temel fonksiyonun kombinasyonları şeklinde de olabilir. Örneğin zaman sabiti ve titreşim elemanının birleşimi ile üçüncü dereceden bir sistem ortaya çıkar. Çıkış Çıkış Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
GEÇİCİ REJİM CEVABI Sistemin farklı giriş fonksiyonlarına cevabı (davranış şekli) farklı olacaktır. Kontrol sistemlerinin tasarımında ve davranış şekillerinin karşılaştırılarak incelenmesinde, bazı tipik giriş fonksiyonları kullanılmaktadır. Bunlar Basamak fonksiyonu Rampa fonksiyonu Impuls fonksiyonu Sinüs fonksiyonu Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
GEÇİCİ REJİM CEVABI Sistemin transfer fonksiyonu orantı elemanı tipinde (K) ise; uygulanan giriş fonksiyonuna cevabı, sabit orantı sayısı K ile çarpılarak elde edilecektir. Giriş basamak fonksiyonu (X(s)=A/s), (A=sabit), ise cevap Y(s)=K.A/s olur ve cevap değeri K çarpanı kadar değişmiş bir basamak fonksiyonudur. Girişe rampa fonksiyonu (X(s)=A/s2) uygulanırsa, cevap değeri yine bir rampadır, sadece eğim K çarpanı kadar değişerek (K.A) olur. Sistemin transfer fonksiyonu 1/Cs kapasite elemanı tipinde ise çıkış, giriş fonksiyonunun integrali olacaktır. Kapasite elemanının basamak girişe cevabı rampa fonksiyonudur. Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman sabiti elemanı, diferansiyel denklemi birinci dereceden olan bir sistemi gösterir. Zaman sabiti elemanının transfer fonksiyonu (τ:Zaman sabiti) 𝐶(𝑠) 𝑅(𝑠) = 1 𝜏𝑠+1 Girişe birim-basamak, birim-rampa ve birim-impuls uygulanarak cevap davranışı incelenecek. Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman Sabiti Elemanının Basamak Cevabı Girişe r(t)=u(t) birim basamak fonksiyonu uygulanacaktır. C s = 1 𝜏𝑠+1 1 𝑠 Basit kesirlere ayırıp sabitler yerine yazılırsa; Ters Laplace dönüşümü alınarak; Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman Sabiti Elemanının Basamak Cevabı Cevap davranışı, t’ye değerler vererek elde edilir. Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman Sabiti Elemanının Basamak Cevabı Nihai değere ulaşması için 4τ zaman beklemek gerekir. Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman Sabiti Elemanının Rampa Cevabı Girişe r(t)=t birim rampa fonksiyonu uygulanacaktır. C s = 1 𝜏𝑠+1 1 𝑠 2 Basit kesirlere ayırıp sabitler yerine yazılırsa; 𝐶 𝑠 = 1 𝑠 2 − 𝜏 𝑠 + 𝜏 2 𝜏𝑠+1 𝐶 𝑠 = 1 𝑠 2 − 𝜏 𝑠 + 𝜏 𝑠+ 1 𝜏 Ters Laplace dönüşümü alınarak; 𝑐 𝑡 =𝑡−𝜏+𝜏 𝑒 − 𝑡 𝜏 Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman Sabiti Elemanının Rampa Cevabı 𝑐 𝑡 =𝑡−𝜏+𝜏 𝑒 − 𝑡 𝜏 Zamanla t büyürken 𝜏 𝑒 − 𝑡 𝜏 terimi küçülerek ortadan kalkar ve geriye 𝑐 𝑡 =𝑡−𝜏 kalır. Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman Sabiti Elemanının Rampa Cevabı Cevap ile giriş arasındaki fark yani hata hesaplanırsa e t =r t −c t =t− 𝑡−𝜏+𝜏 𝑒 − 𝑡 𝜏 =𝜏(1− 𝑒 − 𝑡 𝜏 ) t sonsuza giderken 𝑒 − 𝑡 𝜏 terimi sıfıra yaklaşır ve hata, 𝑒(𝑡→∞)=𝜏 olur. Bu hataya daimi (sürekli) rejim hatası denir. 𝑒 𝐷𝑅 =𝜏 Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman Sabiti Elemanının İmpuls Cevabı Girişe δ(t) birim impuls fonksiyonu uygulanacaktır. C s = 1 𝜏𝑠+1 1 Buradan; 𝐶 𝑠 = 1 𝜏 𝑠+ 1 𝜏 Ters Laplace dönüşümü alınarak; 𝑐 𝑡 = 1 𝜏 𝑒 − 𝑡 𝜏 Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki
ZAMAN SABİTİ ELEMANININ GEÇİCİ REJİM CEVABI Zaman Sabiti Elemanının İmpuls Cevabı Sakarya Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Prof. Dr. Recep Kozan Yrd.Doç.Dr. Aysun Eğrisöğüt Tiryaki