Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
- OTOMATİK UÇUŞ SİSTEMLERİNİN GENEL ÇALIŞMASI - ÇALIŞMA MODLARI - ACTUATORLER
Yrd. Doç. Dr. Hamdi ERCAN Uçak Elektrik-Elektronik Bölümü, Sivil Havacılık Yüksekokulu, Erciyes Üniversitesi, KAYSERİ Mart-2013

2
SUNUM AKIŞI Otomatik Uçuş Sistemlerinin Genel Tanımı
Otomatik Uçuş Sisteminin Amacı Otomatik Uçuş Sistemini Oluşturan Komponentler Autopilot(Otopilot) ve Sistem Elemanları APFD(Autopilot Flight Director) Çalışma Modları Actuatorler
 ve Sistem Elemanları. APFD(Autopilot Flight Director) Çalışma Modları. Actuatorler.")
3
GİRİŞ Günümüzün en hızlı ulaşımını sağlayan, uçak endüstrisinde kararlı ve kontrol edilebilir bir uçuşun anlaşılması, uçak tasarımları açısından önemli bir rol oynamaktadır. Bir otomatik uçuş sistemi, bir insan tarafından yerine getirilen anlama, komuta etme ve uygulama görevlerini aynen kopya edebilir. Bu sistem sayesinde, uzun süreli uçuşların yorucu yükü pilot üzerinden alınarak, gerekli seyrüsefer işlemlerini yapabilmesi için yeterli olanak sağlanır.

4
Otomatik Uçuş Sisteminin Amacı
İlk başta, uçak bordasındaki bazı görevlerin otomatik oluşu, hizmetin kalitesini,emniyetini, düzgünlüğünü ve rahatlığını iyileştirme olanağı sağlar, meteorolojik şartlar nedeniyle de bir uçuşun gerçekleştirilememesi riskini azaltır.

5
Otomatik Uçuş Sisteminin Amacı
Otomatik kontrol sistemleri ve otopilotlar, yapay kararlılığın geliştirilmesi, kötü hava şartlarında pilotların yön bulmasında (navigasyon), uçağın kontrollerine yardımcı olmada ve uçağın güvenli bir şekilde yeryüzüne indirilmesinde büyük destek sağlamaktadırlar.
, uçağın kontrollerine yardımcı olmada ve uçağın güvenli bir şekilde yeryüzüne indirilmesinde büyük destek sağlamaktadırlar.")
6
Otomatik Uçuş Sisteminin Amacı
Mürettebat, sıkça tekrarlanan ve yorucu olan mekanik işlerden kurtulur ve bir insanın yapmasının zorunlu olduğu işlere daha fazla zaman ayırması sağlanır. İş yükünün hafiflemesi sayesinde, bütün uçuş süresince gerçeklesen olaylar daha iyi gözlemlenebilir ve böylece daha emniyetli uçuş gerçekleştirilebilmektedir. Buna ek olarak, mürettebat sayısını azaltmak mümkün görülmektedir.

7
Otomatik Uçuş Sisteminin Amacı
Havayolu ulaşımı, meteorolojik faktörlerin yarattığı engellemeleri yenmek için devamlı bir şekilde uğraşmaktadır. Havacılıkta, otomatikleşme eğilimi, son yıllarda gelişmiş ve zorunlu bir hale gelmiştir. Bu otomatikleşme, büyük ölçüde, uzay araştırmaları ile gerçeklesen elektroniğin hızla ilerlemesi sayesinde mümkün olmuştur.

8
Otomatik Uçuş Sisteminin Amacı
Uçakların sınırlı uçuş süresi, daha hassas bir seyrüseferin gerekli olduğunu ortaya çıkarmıştır. Performansların çabuk gelişmesi, daha etkin otomatik uçuş kumanda sistemlerine ihtiyaç olduğunu göstermiştir.

9
Otomatik Uçuş Sisteminin Amacı
Bir uçağı, verilen bir doğrultuda, sürekli olarak yatay uçuşta tutmak ve yönetmek için geliştirilmiş seri kontrol mekanizmaları "Otomatik Pilot" yada "Otopilot" olarak adlandırılır. Otomatik pilot, uçağa daha iyi bir kararlılık sağlamak için, pilota yardımcı olmak üzere kullanılır, gerekli kumandaları vererek kontrol yüzeylerini hareketlendirir.

10
Otomatik Uçuş Sisteminin Amacı
Devamlı doğrusal ve yatay uçuşun tutulması, daha ayrıntılı olarak, yüksekliğin, hava hızının veya mach sayısının ve rotanın daima sabit tutulması sık sık tekrarlanan, usandırıcı ve yorucu bir iştir yılları arasındaki İkinci Dünya Savaşı'ndan önce, daha basit bir sisteme sahip olan otomatik pilot ile yüksekliği ve rotayı sabit tutma olanağı sağlanmıştır.

11
Otomatik Uçuş Sisteminin Amacı
Tam olarak teçhiz edilmiş bir otopilot , insan faktörü olmaksızın bir hava taşıtının kalkışına, önceden belirlenmiş bir rota izlemeyi veya belirlenmiş bir havaalanına inmeyi sağlar.

12
Otomatik Uçuş Sisteminin Amacı
Bazı manevralar, pilottan büyük bir beceri ve devamlı dikkat gerektirir. Bunların dikkatsizce yapılması uçuş emniyetini tehlikeye sokabilir. Örneğin;bir piste yaklaşma manevrası, bir otomatik pilottan istenebilir.Böylece uçuş emniyeti artırılır, yaklaşma doğrultusu daha hassas şekilde tutulur ve yaklaşma sırasında pilot, kendini tamamen uçuşun kontrolüne ve izlenmesine verebilir.

13
Otomatik Uçuş Sisteminin Amacı
Ayrıca, otomatik pilot, seyrüsefer ünitesine, VOR ve ILS donanımına bağlanabilir ve böylelikle, verilen bir rota veya yol doğrultusu, otomatik olarak izlenebilir.

14
Otomatik Uçuş Sisteminin Amacı
Otopilotta iki adet ana bilgisayar bulunmaktadır. Bunlar (Flight Control Computer) FCC A ve FCC B olarak adlandırılır. FCC bilgi girişlerini air data inertial reference system (ADIRS), flight managemen computer (FMC)’dan ve bazı referans sistemlerden alarak kıyaslama yapar ve gereken komutları aileron, elevator ve rudder actuatorlerine iletir.
 FCC A ve FCC B olarak adlandırılır. FCC bilgi girişlerini air data inertial reference system (ADIRS), flight managemen computer (FMC)’dan ve bazı referans sistemlerden alarak kıyaslama yapar ve gereken komutları aileron, elevator ve rudder actuatorlerine iletir.")
15
Otomatik Uçuş Sistemini Oluşturan Komponentler

16
Otomatik Uçuş Sistemini Oluşturan Komponentler

17
FCC

18
Otomatik Uçuş Sisteminin Amacı
Bu oto pilotlardan hangisinin çalışacağını mode control panel(MCP)’den seçtikten sonra otopilot kontrolleri aşağıdaki uçuş planı doğrultusunda uçağın pozisyonunu kontrol eder . Bu pozisyonlar; Climb (tırmanma, yükselme) Cruise (düz uçuş) Descent (alçalma) Approach ( inişe yaklaşma)
’den seçtikten sonra otopilot kontrolleri aşağıdaki uçuş planı doğrultusunda uçağın pozisyonunu kontrol eder . Bu pozisyonlar; Climb (tırmanma, yükselme) Cruise (düz uçuş) Descent (alçalma) Approach ( inişe yaklaşma)")
19
Otomatik Uçuş Sisteminin Amacı
Go-around (uçağın inişten vazgeçip pas geçmesi) Flare (iniş öncesi, tekerlekler yere değmeden az önceki pozisyon)
 Flare (iniş öncesi, tekerlekler yere değmeden az önceki pozisyon)")
20
Otomatik Uçuş Sistemini Oluşturan Komponentler
Günümüz uçaklarında otomatik uçuş işlemi, dijital uçuş kontrol sistemi (DFCS-digital flight control system) vasıtası ile gerçekleşir. Bu sistemin görevleri şunlardır: * Autopilot (Otopilot) * Flight director (Uçuş yöneticisi) * Altitude alert (yükseklik uyarısı)
 vasıtası ile gerçekleşir. Bu sistemin görevleri şunlardır: * Autopilot (Otopilot) * Flight director (Uçuş yöneticisi) * Altitude alert (yükseklik uyarısı)")
21
Otomatik Uçuş Sistemini Oluşturan Komponentler
* Speed trim (Hız ayarı) * Mach trim (Mach Ayarı “mach= uçak hızının ses hızına oranı”) * Autothrottle (Otomatik Gaz valfi “uçaktaki yakıt sisteminin kontrolü”)
 * Mach trim (Mach Ayarı mach= uçak hızının ses hızına oranı ) * Autothrottle (Otomatik Gaz valfi uçaktaki yakıt sisteminin kontrolü )")
22
Otomatik Uçuş Sistemini Oluşturan Komponentler
DFCS sistemin işleyişi blok şema şeklinde verilmiştir. FCC A ve FCC B sensörlerden ve diğer actuatorlerden ve indikatörlerden gelen dataları kullanır.

23
Otomatik Uçuş Sistemini Oluşturan Komponentler
Kısaca otopilot; Uzunlamasına durumun veya yüksekliğin tutulması Rotanın alınması ve tutulması, sabit yatışlı virajların yapılması, Bir seyrüsefer bilgisayarının otomatik kontrolü Kumanda yüzeyi durumlarının otomatik olarak ayarlanması Bir VOR doğrultusunun otomatik kontrolü ILS ile yaklaşmanın gerçekleştirilmesi

24
Uçuş Kontrolörü Otopilot, AP butonuna basılarak ayarlanır. Otopilot ayarlandığı zaman AP butonunun altındaki ışık yanar. YAW butonu, hava hızı değişikliğinde rudder dengeleyicisinin otomatik kontrolünü sağlar. HDG ve NAV butonları, otopilotun,seçilen RNAV rotasında uçmayı ve VOR radyali ile birleşmesini veya ilk seçilen girişi takip etmesini sağlar.

25
Otopilotu devreye alma Flight Director’ü devreye alma
Mode Control Panel MCP pilot ile FCC arasındaki ilk arayüzdür. İstenilen bilgiler buradan FCC’ye iletilir. Bu panel üzerinde aşağıdaki komutlar girilir. bunlar; Otopilotu devreye alma Flight Director’ü devreye alma Çalışma modunu seçme İrtifa ve hedeflenen hızı seçme

26
Mode Control Panel

27
APPR (Approch)butonu, havaalanına yaklaşma esnasında localizer ışığını yakalamada veya VOR radyali veya RNAV bilgisini kullanarak havaalanına yaklaşırken otopilotu kumanda eder. Eğer uçak normal rota sinyalinin tam tersi yönünden yaklaşma yapmak zorunda ise REV butonuna basılarak ters rota bilgisine ulaşılır.

28
GS butonu, eğimli iniş rotası (glide slope) sinyalinin yakalamasında ve izlenmesinde kullanılır. ALT butonu, otopilotun seçilen barometrik irtifanın korunmasını sağlar.

29
Dönüş ve Bank Açısı (Turn & Bank) Göstergesi
Elektrik sinyali ile çalışan ve cironun bir parçası olan bu gösterge, dönüş oranı bilgisini görsel olarak sağlar ve dönüş oranı bilgisi ile otopilota elektriksel sinyal gönderir. Bu gösterge içindeki inclinometre topu, uçağın koordine edilmiş rudder ve aileron kontrolünde uçup uçmadığını pilota gösterir.

30
Dönüş ve Bank Açısı (Turn & Bank) Göstergesi
 Göstergesi")
31
Yönlendirici Yatay (Director Horizon) Göstergesi
Bu cihaz davranışı hisseder ve elektrik sinyaline dönüştürerek bilgisayar yükselticiye gönderir.Bu sinyaller yükseltilerek pitch ve roll hareketi için kontrol yüzeylerinin hareketini sağlayan birincil servoya gönderilir. Aynı anda gösterge, pilotu bilgilendirmek için pitch ve roll’ün derecesini de ölçer.

32
Yönlendirici Yatay (Director Horizon) Göstergesi
Gösterge içindeki dikey ciro, sistem için seçilen cironun özelliğine bağlı olarak vakum sistemi veya elektrikle çalıştırılır. Ciro dünya yüzeyine dik olarak sabit biçimde kaldığı zaman, uçağın pitch ve roll hareketi ciro ve göstergenin birlikte hareketine neden olur. Buda otopilot ve göstergede gösterim için sinyallerin üretilmesini sağlar.

33
OTOPİLOT ÇALIŞMA MODLARI
Autopilot Command (CMD) ve Control Whell Steering (CWS) modlarda çalışabilir. CMD modda: Bu modda sistem tamamen otomatik çalışır. FCC den aldığı bilgiler doğrultusunda actuatorleri hareket ettirir. CWS modda: Bu modda sistem kontrol levyesinden aldığı sensler ile FCC ye bilgi gönderir ve aldığı bu datalar ile FCC ye actuatolere bilgiyi gönderir. Otopilotun hangi modda olduğu PFD de görünür.
 ve Control Whell Steering (CWS) modlarda çalışabilir. CMD modda: Bu modda sistem tamamen otomatik çalışır. FCC den aldığı bilgiler doğrultusunda actuatorleri hareket ettirir. CWS modda: Bu modda sistem kontrol levyesinden aldığı sensler ile FCC ye bilgi gönderir ve aldığı bu datalar ile FCC ye actuatolere bilgiyi gönderir. Otopilotun hangi modda olduğu PFD de görünür.")
34
ACTUATORLER Temelde uçak üzerinde 4 adet otopilot actuatorü bulunur. Bunlardan iki tanesi elevator diğer iki tanesi ise aileronlar içindir. Aileron ve elevator actuatorlerinden birer tanesi FCC A dan geriye kalan iki tanesi de FCC B den sens alarak hidrolik akışını sağlar.

35
ACTUATORLER İstenildiğinde aileronlar sadece actuator A veya actuator B ile de kontrol edilebilir. Çift modda iken her iki actuator A ve B birlikte kullanılır. Bu elevator actuator içinde kullanılabilir.

36
ACTUATORLER Otopilot actuatorleri FCC den gelen bir elektrik sinyali doğrultusunda üzerinde bulunan valfler sayesinde hidrolik akışını açarak istenilen değere göre kontrol yüzeyini hareket ettirmektedir.

37
ACTUATORLER İstenildiğinde aileronlar sadece actuator A veya actuator B ile de kontrol edilebilir. Çift modda iken her iki actuator A ve B birlikte kullanılır. Bu elevator actuator içinde kullanılabilir.

38
ACTUATORLER Otopilot Actuatorü

39
ACTUATORLER

40
Actuator Selenoid Valve Defent Selenoid Valve Transfer Valve
ACTUATORLER Actuator üzerinde; Actuator Selenoid Valve Defent Selenoid Valve Transfer Valve Hydrolic Pressure Switch bulunur.

41
Transfer Valve: Bu valfin amacı FCC den aldığı sinyale göre ana pistondaki hidrolik basıncını ayarlar.

42
Hydrolic Pressure Switch: Hidrolik basıncı actuatorleri hareket ettirecek seviyeye geldiğinde FCC ye bilgi gönderir ve actuatorlerin hazır olduğunu bildirir.

43
Selenoid Valve ve Actuator Valve: Bu valfin amacı elektriksel bir sinyal aldığı zaman hidroliğin actuatorlere dolmasına izin verir.

44
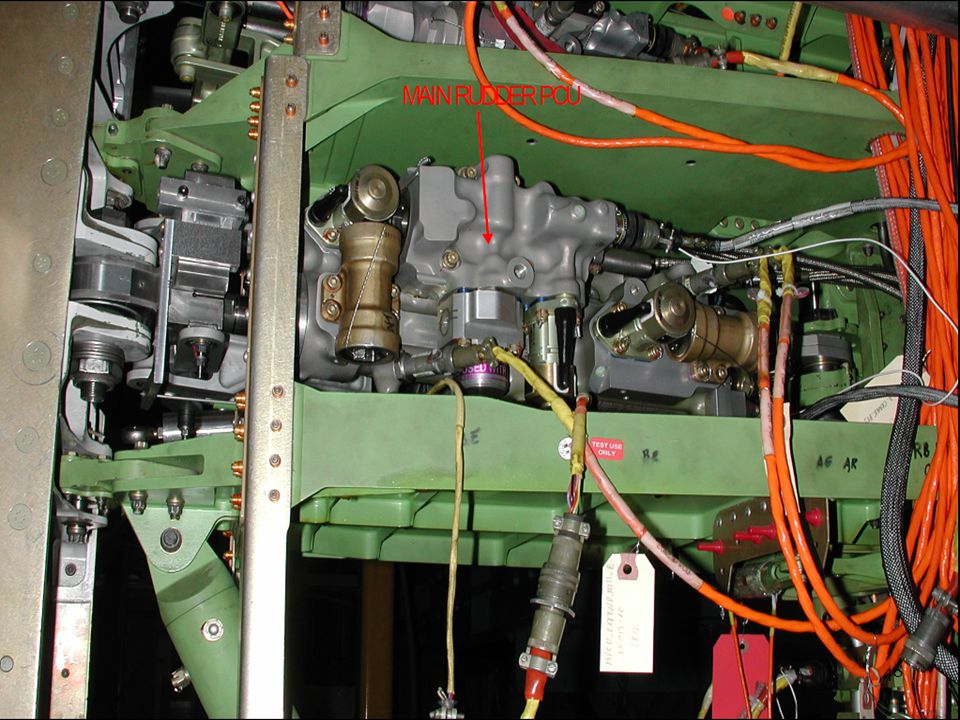
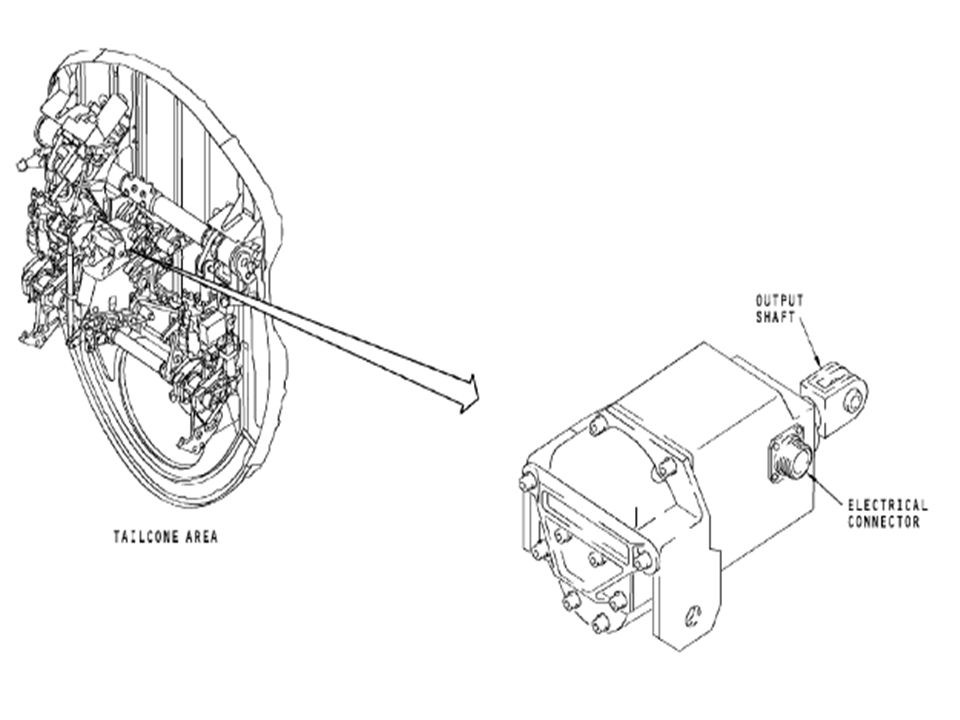
Rudder Actuator Görevi FCC’den gelen elektriksel sinyalleri mekanik harekete dönüştürmektedir. Actuator çıkışı rudderin kontrol miline bağlıdır. Böylece FCC den gelen sinyaller doğrultusunda rudder kontrol edilir.

45
Rudder Actuator Rudder Actuatorünün Çalışması: 28 V DC ile beslenir ve FCC tarafından voltajı kontrol edilir. Actuator üzerinde birbirinden bağımsız iki motor vardır ve bunlar mekaniksel olarak takometre jeneratörüne bağlıdır.

46
Rudder Actuator Bu motorların çıkışı elektriksel kavraması olan ve rudderin bağlı olduğu Crank miline iletilir. Takometre jeneratörünün iki adet çıkışı bulunur ve bunlar FCC A ve FCC B ye bilgi gönderir.

47
Rudder Actuator ACTUATORLER

49
Mach Trim Actuator Mach trim actuatorü uçak hızı aşırı arttığı zaman burun aşağı çekmeye başlar. Bu actuator ile elevator yukarıya çekilerek burnun düzeltilmesi sağlanır. Bu actuatorun diğer amacı ise, uçak kalkış anında, flaplar kapalı ve N1 %20’yi geçince bu durumda elevator hareketleri kalkış esnasında buradan kontrol edilir.

50
Mach Trim Actuator Uçağın kuyruk kısmında bulunur. 115 V 400 Hz’lik bir elektriksel motor ile çalışır FCC ye sinkro vasıtası ile pozisyon bildirimi yapar.

54
Tek Çıkışlı Sinkro Sensör: Bu sensörlerde sadece bir çıkış bulunur
Tek Çıkışlı Sinkro Sensör: Bu sensörlerde sadece bir çıkış bulunur. Stabilizer B de bulunan sensör tekli sinkro sensörüdür. Bu sensör çift çıkışlı sensörün yerine kullanılmaz. Çift Çıkışlı Sinkro Sensörler: Uçaklarda en çok kullanılan sensörlerdir. Bu sensölerde iki adet çıkış bulunur.

55
Çift Çıkışlı Sinkro Sensörler: Uçaklarda en çok kullanılan sensörlerdir. Bu sensörlerde iki adet çıkış bulunur.

56
Otopilot Sensörleri Uçağın kuyruk kısmında bulunur. 115 V 400 Hz’lik bir elektriksel motor ile çalışır FCC ye sinkro vasıtası ile pozisyon bildirimi yapar. Aileron Sensörü Elevator Sensörü Neutral Shift Sensörü Rudder Sensörü Spoiler 4 Sensörü Spoiler 9 Sensörü Stabilizer A Sensörü

57
Otopilot Sensörleri Bu sensörler slindirik bir kutu içine yerleştirilmiş ve +/- 140 derece dönebilen ünitelerdir. Sensörlere FCC den gelen iki adet kablo bağlıdır. Sensörlere temelde 14 V AC ve 1,8 KHz uyartım gerilimi gelir.

58
Otopilot Sensörleri Sensör 0 ile +140 derece arasında bir dönüş yaparsa çıkış voltajı 0 ile 6,36 volt arasında değişiklik gösterir. 0 ile -140 derece arasındaki dönüşlerde yine 0 ile 6,36 arasında çıkış voltajı üretir. Fakat burada 180 derecelik faz farkında çalışır.

59
TEŞEKKÜRLER...

Benzer bir sunumlar




>")



>")









>")
>")

