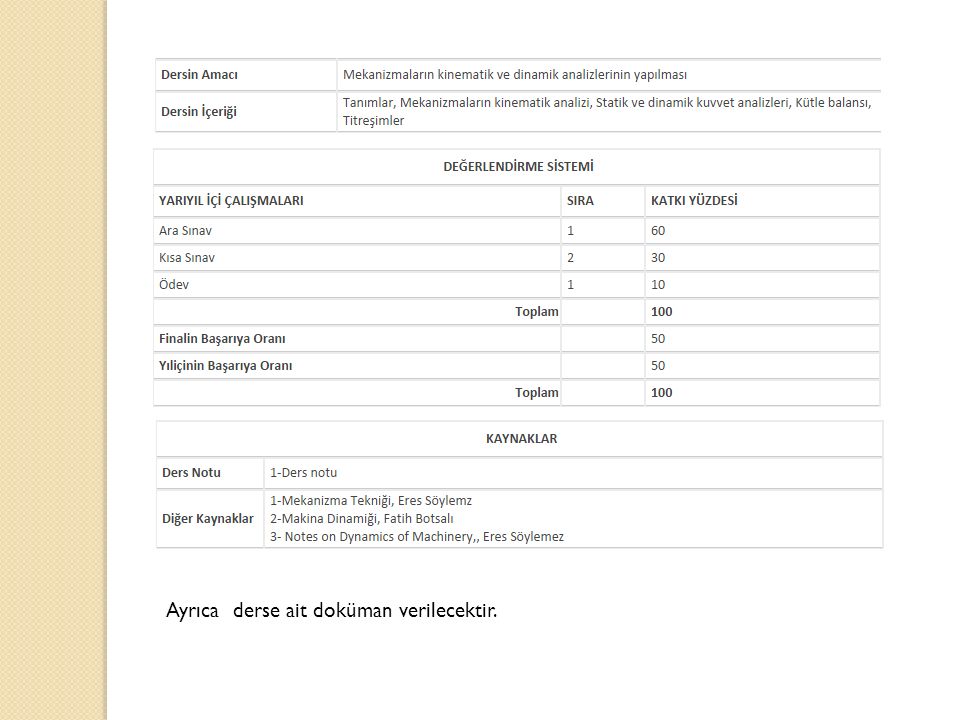
MAKİNE DİNAMİĞİ 1-Ders notu 1-Mekanizma Tekniği, Eres Söylemz 2-Makina Dinamiği, Fatih Botsalı 3- Notes on Dynamics of Machinery,, Eres Söylemez 4-Makine Teorisi-Mekanizmalar ve Makine Dinamiği, Özgür Turhan 5-Kinematics, Dynamics, and Design of Machinery, Waldron and Kinzel 6-Machines and Mechanisms, David Myszka
Ayrıca derse ait doküman verilecektir.
MEKANİZMA TEKNİĞİ Eğer mekanik bir sistem, bir hareket girdisini, istenilen bir hareket çıktısına dönüştürme özelliğine sahipse, bu sistem bir MEKANİZMA ’dır. Esas işlevi, bir işin yapılması için gerekli olan kuvveti ya da torku iletmek olan bir mekanizmaya MAKİNA denir. Enerji dönüşümü yoluyla mekanik güç üreten makinalara MOTOR denir. Yeni bir makinaya veya mevcut bir makinanın geliştirilmesine ihtiyaç duyulmasıyla makina dizaynı süreci başlar. Makinanın yapacağı işin gereği hareketleri yapabilen bir mekanizmanın kurulmasına KİNEMATİK DİZAYN denir.
Bir makinanın, kinematik dizaynı açısından mükemmel olması, işletmeye alındığında, başarılı bir şekilde çalışacağını göstermez. Mesela, makina elemanları, üzerlerine etkiyen kuvvetlere karşı yeterince mukavemetli olmayabilir; makina , yapılacak işin istediği hız performansını göstermeyebilir; sarsıntılı ve gürültülü olarak çalışıyor olabilir, v.s. Bu gibi problemlerin dizayn aşamasında teşhis edilerek gerekli tedbirlerin alınabilmesi için, makina üzerinde etkiyen kuvvetlerin ve makina elemanlarının ivmeli hareketlerinin etkilerinin de göz önüne alınması gereklidir. Bu konuların incelenebilmesinin bir ön şartı, makina elemanlarının hız ve ivmelerinin hesaplanabilmesidir.
Mekanizma Tekniği; 1. Mekanizmaların Sistematiği = Çeşitli mekanizmaların, düzenlenme, tasarlanma yöntemleri ve ihtiyaçlarının metodolojik bir yaklaşımla incelenmesi 2. Mekanizmaların Analizi = Mevcut bir mekanizmanın yaptığı hareketlerin incelenmesi ( hız ve ivme ) 3. Mekanizmaların Sentezi = İstenilen bir hareketi sağlayan, geometrik ölçülerin tayinine yarayacak metotlar ve pratik olarak uygun bir mekanizmasının belirlenmesi konularıyla uğraşır.
Mekanizma Örnekleri
Mekanizma Çeşitleri: Yapı elemanlarına göre mekanizmalar ÖDEV. Çevrenizden mekanizma örnekleri bulup fotoğraflayın, ve şeklini basitçe çizerek çalışmasını açıklayınız. Mekanizma Çeşitleri: Yapı elemanlarına göre mekanizmalar - Kollu mekanizmalar - Yürek mekanizmalar - Dişli çark mekanizmaları - Bantlı veya zincir mekanizmaları - Vida Mekanizmaları - Sürtünme mekanizmaları olmak üzere çeşitli alt kümelere ayrılabilir.
TEMEL KAVRAMLAR: Makina enerjiyi işe dönüştüren mekanizmalar topluluğu, Mekanizma ise hareketin aktarımını yapan uzuvlar topluluğudur. Dolayısıyla ; Uzuv :Mekanizmayı meydana getiren elemanların her birine uzuv denir. Uzuvların rijit cisimler olduğu kabul edilecektir. ( Piston, biyel, dişli vs. ) Uzuv üzerindeki noktalar aynı veya birbirlerine paralel düzlemler üzerinde hareket ediyorlarsa, uzuv düzlemsel hareket yapıyor demektir. İki noktanın hareketi tüm uzvun hareketini belirler.
Düzlemsel hareket tipleri : Dönü ( Krank hareketi ) Öteleme (Piston hareketi ) Dönü + Öteleme ( Biyel hareketi ) Uzaysal hareket tipleri : Helisel hareket ( Bir vida üzerinde dönen somun ) Küresel hareket ( Küre-kabuk çiftinin hareketi) Ayrıca; Mutlak hareket ( Referans uzuv sabit ) Relatif (izafi - bağıl) hareket (Referans uzuv hareketli ) den söz edilebilir.
Kinematik Eleman :Rijit bir cismin, rijit bir başka cisimle bağlantısını sağlayan yüzey parçası Eleman Çifti ( Kinematik Çift ) : Bir mekanizmanın komşu uzuvlarını istenen izafi hareketleri yapmalarını sağlamak üzere, uygun şekilde birbirine bağlayan ve yine bu uzuvların birer parçası olan temas veya bağlantı yerlerine ELEMAN ÇİFTİ adı verilir. .
2. Temas Sağlanış Şekline Göre - Kapalı Eleman Çifti : Eleman çiftlerinin tipi ve mekanizmadaki dağılımları, mekanizmanın ana karakteristiklerini belirler. Eleman Çiftleri : Temas Şekline Göre -Adi Eleman Çifti -Yüksek Eleman Çifti 2. Temas Sağlanış Şekline Göre - Kapalı Eleman Çifti : . Şekil Kapalı Eleman Çifti . Kuvvet Kapalı Eleman Çifti - Açık Eleman Çifti 3. Serbestlik Derecesine Göre sınıflandırılabilir. Eleman Çifti=( EÇ )
Bunları sırasıyla inceleyecek olursak : 1. Temas Şekline Göre Adi Eleman Çifti : Uzuvlar arasındaki temaslar, yüzeyler boyunca meydana gelir. Adi Eleman Çiftlerinde hareket serbestisi düşüktür; ancak, daha yüksek kuvvetler iletilebilir.
Yüksek Eleman Çifti : İki uzuv arasında temas ya bir noktada olur, veya bir çizgi boyunca meydana gelir. Büyük kuvvetlerin iletiminde kullanılmazlar.
2. Temas Sağlanış Şekline Göre: A : Kapalı Eleman Çiftleri Şekil Kapalı Eleman Çifti: Temas, çifti oluşturan cisimlerin geometrik şekilleri vasıtasıyla sağlanır. Kuvvet Kapalı Eleman Çifti: Temas, dışardan uygulanan kuvvetler yardımıyla sağlanır.( yay kuvveti, ağırlık kuvveti vs. gibi )
B: Açık Eleman Çifti Bu durumda uzuvlar arası temas ve temassızlık kontrollü olarak sağlanır.
3. Serbestlik Derecelerine Göre: Serbestlik Derecesi (SD), cismin konumunu belirlemek için verilmesi gerekli parametrelerin sayısıyla ifade edilebileceği gibi, o cismin referans cisme göre yapabileceği birbirinden bağımsız hareketlerin sayısı olarak da ifade edilebilir. a) İki Boyutlu (Düzlemsel ) Uzayda SD = 3 tür. a, b, 𝜃 → 3 parametre ( iki öteleme bir dönme) veya ∅, 𝜃, r → 3 parametre
EÇ’ leri en çok 5 SD’ li olabilir. b) 3 Boyutlu Uzayda SD = 6 dır. A noktasının yeri : a, b, c Düzlemlere göre konumu: 𝛼 ,𝜃,𝛾 Yani 3 öteleme 3 dönme EÇ’ nin SD’ si = 6 – (Kaldırılan hareket imkanı sayısı) Küre için → 6-1 =5 EÇ’ leri en çok 5 SD’ li olabilir.
Cisimlerin teması yüzeylerde vuku bulursa, bu taktirde karşılıklı hareket ancak bazı özel yüzeyler halinde doğabilir; yani helisel yüzeyler, dönel yüzeyler, prizmaların yanal yüzeyleri vs. gibi kendi kendine saran yüzeyler halinde. Yüzeylerin cinsine göre SD farklıdır. Dönel yüzeylerde ve helisel yüzeylerde 1, dairesel silindir yüzeylerde 2, düzlem ve küresel yüzeylerde 3’ tür.
KİNEMATİK ZİNCİRLER Eleman çiftleri vasıtasıyla karşılıklı hareket serbestlikleri sınırlandırılmış rijit cisimlerden oluşan uzuvların hareketli topluluğuna Kinematik Zincir (KZ) denir. Mekanizmanın kurgusal yapısını ve mecburi hareketliliğini araştırmada mekanizmanın KZ’ inden yararlanılır. Bir kinematik zincirin uzuvları, üzerinde bulunan EÇ’ lerinin sayısına, yani bağlı oldukları veya temas ettikleri komşu uzvun sayısına göre isimlendirilirler. Uzvun ihtiva ettiği EÇ sayısı İsimlendirme Gösterim 0 Uzuv 1 Birli uzuv 2 İkili uzuv 3 Üçlü uzuv 4 Dörtlü uzuv . .
Eğer kinematik zincirde her uzuv en aşağı iki komşu uzuvla temasta ise, yani birli uzuvlara sahip değilse, bu zincirlere Kapalı KZ denir. Birli uzuvlar varsa, bunlara Açık KZ’ ler denir. Kinematik Zincir, bir mekanizma yapısının idealleştirilmiş gösterimidir. Bağlantı elemanlarının (uzuvların) boyutları dikkate alınmaz. Her bir uzuv bir doğru veya üçgen / dörtgen elemanla gösterilir. Eğer KZ’ deki uzuvların hepsinin hareketi bir düzlem içinde kalıyorsa, KZ’ e Düzlemsel KZ denir. Eğer uzuvlar 3 boyutlu hareket ediyorlarsa Uzaysal (hacimsel) KZ denir. Eğer KZ’ deki bir uzuv sabitlenirse, sistem Mekanizma olarak isimlendirilir.
Kinematik zincirle mekanizma ve makina arasındaki ilişki şöyle şematize edilebilir. Şekilden de anlaşılacağı gibi aynı kinematik zincirden çeşitli kinematik mekanizmalar elde edilebilir. Dolayısıyla KZ’ ler mekanizmaların sistematiğine imkan vermesi yanında, bir KZ’ in incelenmesiyle elde edilen sonuçlar bu KZ’ den üretilen mekanizmalar için de geçerlidir. Herhangi bir mekanizmanın yapısını araştırırken, KZ’ de mafsal serbestlik derecelerinin tespiti büyük kolaylık sağlar. KZ Bir uzuv tesbit edilirse Mekanizma n tane uzuv tahrik edilirse Makina Belli bir iş yaptırılırsa Yönlendirilmiş Mekanizma
Verilen bir Mekanizma için KZ’ in bulunması 1. Kinematik şekli bilinen mekanizmanın kinematik zincirini çizmek için önce mekanizma şekli üzerinde sabit uzva 1 tanıtım rakamı verilerek geri kalan uzuvlar sırasıyla numaralandırılır.(Gövde dahil olmak üzere uzuv sayısı= n) 2. Mekanizmada mevcut EÇ’ i tesbit edilir. EÇ sayısı (e) = Adi EÇ sayısı( 𝑒 1 )+ Yüksek EÇ sayısı ( 𝑒 2 ) 3. İkili, üçlü, ……uzuvların sayısı ( 𝑛 2 , 𝑛 3 , ……)
Örnekler : Krank-Biyel Mekanizması n 2e 1 12, 14 ( 𝑛 2 ) 2 21, 23 ( 𝑛 2 ) 3 32, 34 ( 𝑛 2 ) 4 43, 41 ( 𝑛 2 ) n=4 = 𝑛2 e= 4 =𝑒1
4 kol mekanizması
n 1 2 3 4 2e 12, 14 ( 𝑛 2 ) 21, 23 ( 𝑛 2 ) 32, 34 ( 𝑛 2 ) 43, 41 ( 𝑛 2 )
ÖR : Vargel tezgahı mekanizması 2e=14 →e= 𝑒 1 =7 adi eleman f=3n-2 𝑒 1 -3 n 2e 1 12, 14, 16 ( 2 21, 23 ( 𝑛 2 ) 3 32, 34 ( 𝑛 2 ) 4 41, 43, 45 ( 𝑛 3 ) 5 54, 56 ( 𝑛 2 ) 6 61, 65 ( 𝑛 2 ) 𝑛 3 )
ÖR: n=6 , ( 𝑛 2 =4, 𝑛 3 =2) e= 𝑒 1 =7 ÖR: V Motoru , V Kompresörü 12, 14, 16 ( 𝑛 3 ) 2 21, 23 ( 𝑛 2 ) 3 32, 34 ( 𝑛 2 ) 4 43, 45, 41 ( 𝑛 3 ) 5 54, 56 ( 𝑛 2 ) 6 65, 61 ( 𝑛 2 ) n 2e 1 12, 14, 16 ( 𝑛 3 ) 2 21, 23 ( 𝑛 2 ) 3 32, 34, 35 ( 𝑛 3 ) 4 41, 43 ( 𝑛 2 ) 5 53,56 ( 𝑛 2 ) 6 65,61 ( 𝑛 2 ) n=6 , (𝑛2=4, 𝑛3=6) 2e=14 →e=𝑒1=7
ÖR: Goodman Mekanizması (Kullanımı ÖR – Kompresör) 1 12, 16 ( 𝑛 2 ) 2 21, 23 ( 𝑛 2 ) 3 32, 34, 35 ( 𝑛 3 ) 4 43, 46 ( 𝑛 2 ) 5 53, 56 ( 𝑛 2 ) 6 61, 64, 65 ( 𝑛 3 ) n=6 (𝑛2=4 , 𝑛3=2) e =7 = 𝑒1
SORU: SORU: SORU: SORU:
SORU: SORU: