Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

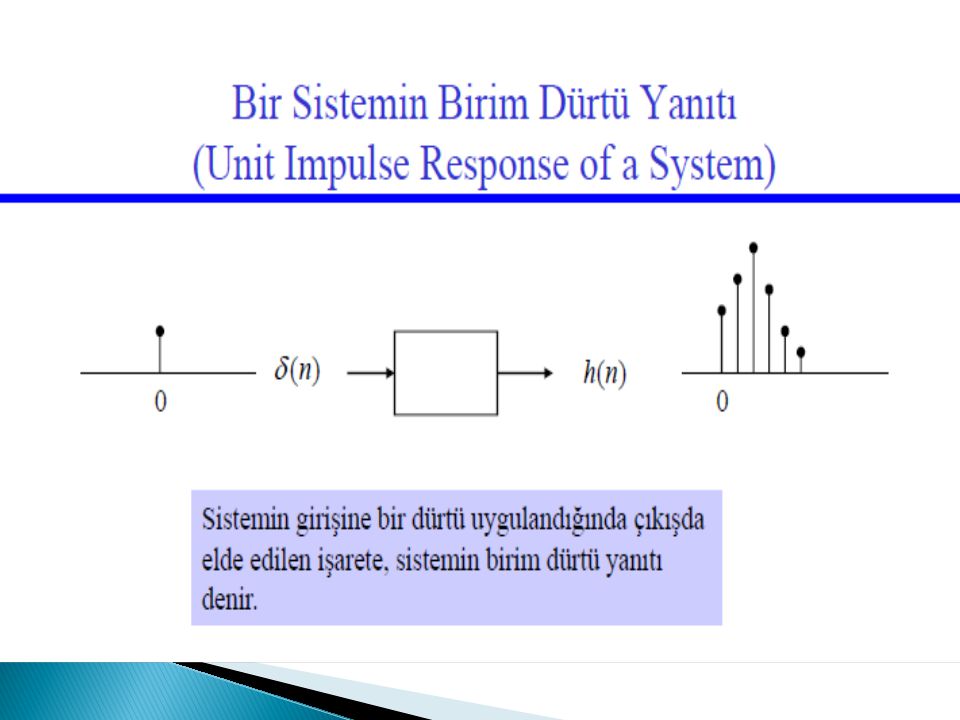
1
4. Hafta

3
% Parametreler % A = 3; % genlik f = 440; % frekans (Hz) phi = -pi/4; % faz fs = 20e3; % örnekleme oranı (20 kHz) Ts = 0; % başlangıç zamanı (0 ms) Te = 10e-3; % bitiş zamanı (10 ms) % Sinüsoidal Sinyal Üretme % tt = Ts : 1/fs : Te; xx = A * cos (2*pi*f*tt+phi); % Grafiği Çiz % plot(tt, xx, 'r'); %xy koordinat sistemi, kırmızı çizgi ile xlabel('Zaman (s)'); %x ve y eksenlerinin adı ylabel('Genlik'); title('x(t)=A cos(2*pi* f *t + phi)'); %grafiğin adı grid %çerçeveler axis([0 10e-3 -4 4]) % sınırlar http://www.abdullahbalta.com/2013/03/07/matlab-ile-sinyallerin- incelenmesi/ http://www.abdullahbalta.com/2013/03/07/matlab-ile-sinyallerin- incelenmesi/
![ % Parametreler % A = 3; % genlik f = 440; % frekans (Hz) phi = -pi/4; % faz fs = 20e3; % örnekleme oranı (20 kHz) Ts = 0; % başlangıç zamanı (0 ms) Te = 10e-3; % bitiş zamanı (10 ms) % Sinüsoidal Sinyal Üretme % tt = Ts : 1/fs : Te; xx = A * cos (2*pi*f*tt+phi); % Grafiği Çiz % plot(tt, xx, r ); %xy koordinat sistemi, kırmızı çizgi ile xlabel( Zaman (s) ); %x ve y eksenlerinin adı ylabel( Genlik ); title( x(t)=A cos(2*pi* f *t + phi) ); %grafiğin adı grid %çerçeveler axis([0 10e ]) % sınırlar incelenmesi/ incelenmesi/](http://images.slideplayer.biz.tr/11/2966370/slides/slide_3.jpg " % Parametreler % A = 3; % genlik f = 440; % frekans (Hz) phi = -pi/4; % faz fs = 20e3; % örnekleme oranı (20 kHz) Ts = 0; % başlangıç zamanı (0 ms) Te = 10e-3; % bitiş zamanı (10 ms) % Sinüsoidal Sinyal Üretme % tt = Ts : 1/fs : Te; xx = A * cos (2*pi*f*tt+phi); % Grafiği Çiz % plot(tt, xx, r ); %xy koordinat sistemi, kırmızı çizgi ile xlabel( Zaman (s) ); %x ve y eksenlerinin adı ylabel( Genlik ); title( x(t)=A cos(2*pi* f *t + phi) ); %grafiğin adı grid %çerçeveler axis([0 10e ]) % sınırlar incelenmesi/ incelenmesi/")
9
(Tekrar)
")
15
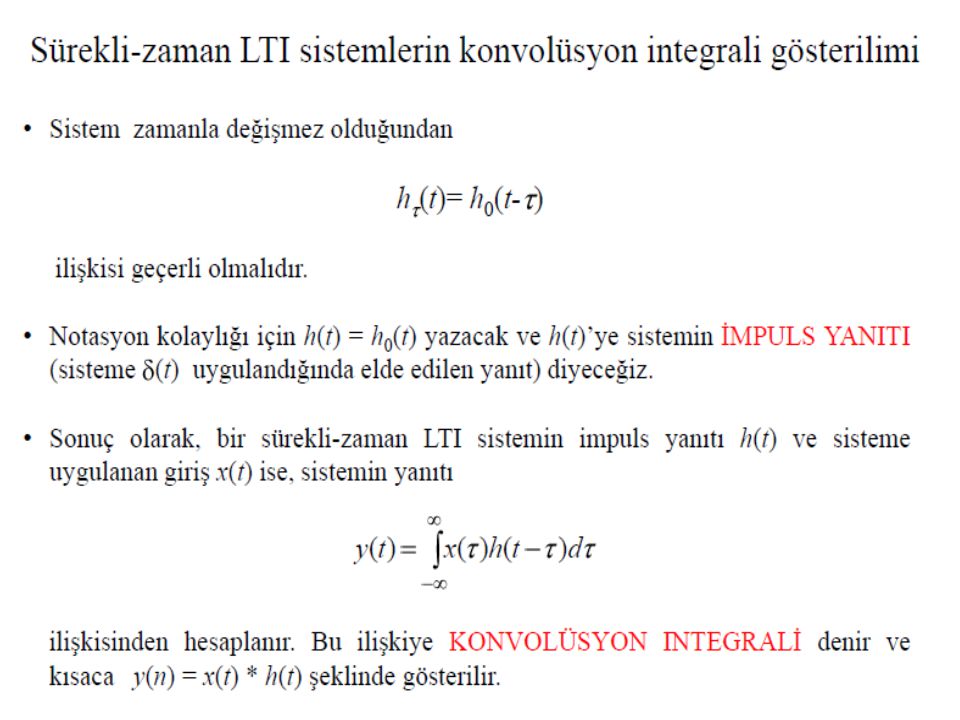
Bir sistemin çıkışı, sisteme uygulanan giriş ile sistemin dürtü yanıtı kullanılarak konvolüsyon toplamı ile hesaplanırken, n arttıkça işlem miktarı ve bellek kullanımı artacaktır. Sistem karakterize edilirken, dürtü yanıtı yerine, sistem çıkışının, girişin o andaki ve eski değerlerine bağlı olarak ifade edilmesi ile sistem çıkışının daha hızlı hesaplandığı bir sistem tasarlamak mümkün olur. Fark denklemleri ayrık sistemlerde kullanılır.

16
http://ceng.gazi.edu.tr/~sas/CT_DT_Sinya l/aciklama.aspx http://ceng.gazi.edu.tr/~sas/CT_DT_Sinya l/aciklama.aspx

18
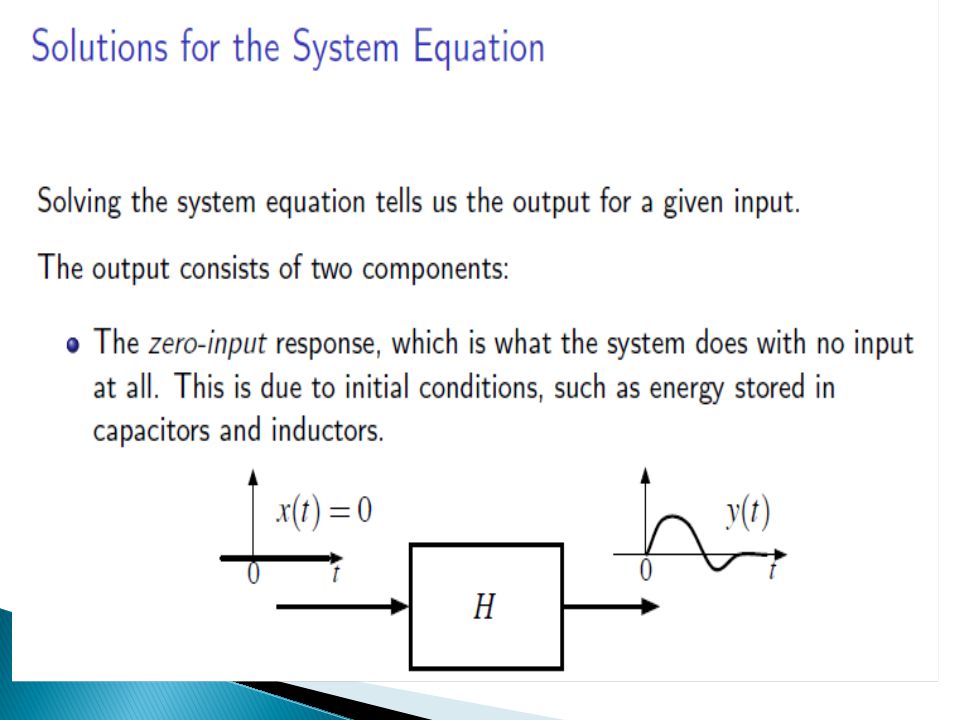
Bir sistemin sıfır giriş yanıtı y sg [n], girişin sıfır olması durumunda (x[n]=0) sadece sistemin dahil durumu (depolanmış enerjiler, başlangıç koşulları, …) nedeni ile verilen sistem çıkışıdır.
![ Bir sistemin sıfır giriş yanıtı y sg [n], girişin sıfır olması durumunda (x[n]=0) sadece sistemin dahil durumu (depolanmış enerjiler, başlangıç koşulları, …) nedeni ile verilen sistem çıkışıdır.](http://images.slideplayer.biz.tr/11/2966370/slides/slide_18.jpg " Bir sistemin sıfır giriş yanıtı y sg [n], girişin sıfır olması durumunda (x[n]=0) sadece sistemin dahil durumu (depolanmış enerjiler, başlangıç koşulları, …) nedeni ile verilen sistem çıkışıdır.")
24
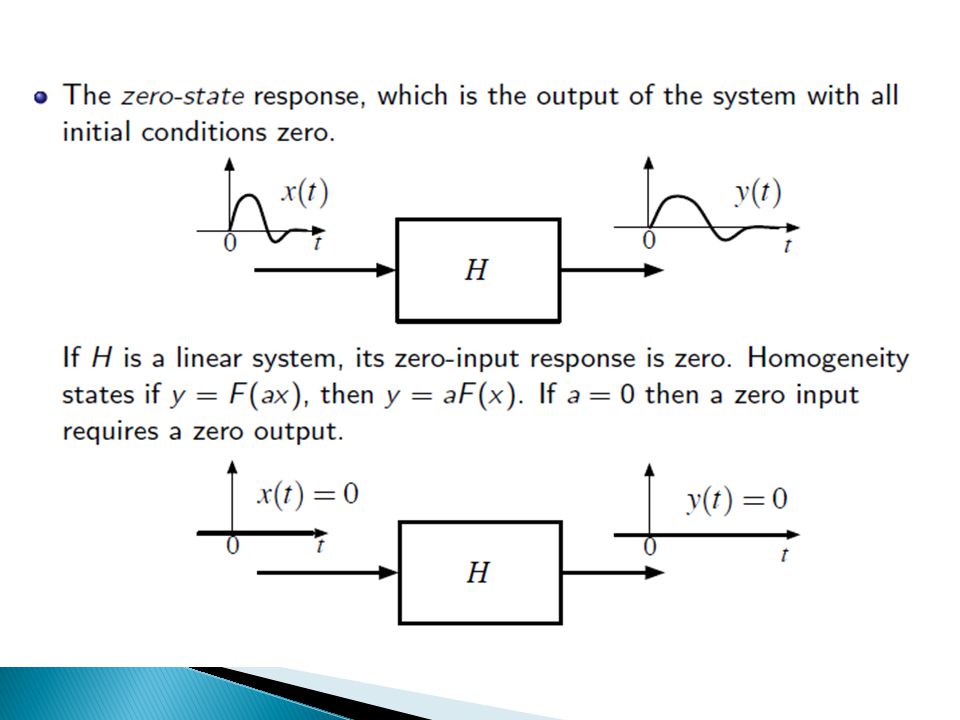
Sıfır durum yanıtı, y sd [n], sistemin bir giriş işareti x 0 [n] için durağan başlangıç koşulları altında verdiği yanıttır. Sistem durağan başlangıç koşullarında olduğundan, sistemin dürtü yanıtı elde edildikten sonra, sıfır durum yanıtı y sd [n], giriş işareti ile dürtü yanıtının (impulse response) konvolüsyon toplamından elde edilebilir. y sd [n]=x[n]*h[n] SİSTEMİN SIFIR DURUM YANITI
![ Sıfır durum yanıtı, y sd [n], sistemin bir giriş işareti x 0 [n] için durağan başlangıç koşulları altında verdiği yanıttır.](http://images.slideplayer.biz.tr/11/2966370/slides/slide_24.jpg " Sistem durağan başlangıç koşullarında olduğundan, sistemin dürtü yanıtı elde edildikten sonra, sıfır durum yanıtı y sd [n], giriş işareti ile dürtü yanıtının (impulse response) konvolüsyon toplamından elde edilebilir. y sd [n]=x[n]*h[n] SİSTEMİN SIFIR DURUM YANITI.")
26
Toplam Yanıt = Sıfır Durum Yanıtı + Sıfır Giriş Yanıtı Çoğunlukla doğrusal, zamanla değişmez ve nedensel sistemler tercih edildiği için sistemler durağan başlangıç koşullarında ele alınmaktadır. Bu durumda sistemler sıfır-giriş yanıtı vermez, sadece sıfır-durum yanıtının alınması yeterlidir.

34
http://en.wikipedia.org/wiki/Convolution http://en.wikipedia.org/wiki/Convolution

35
http://www.fit.vutbr.cz/study/courses/ISS/public/d emos/conv/ http://www.fit.vutbr.cz/study/courses/ISS/public/d emos/conv/

44
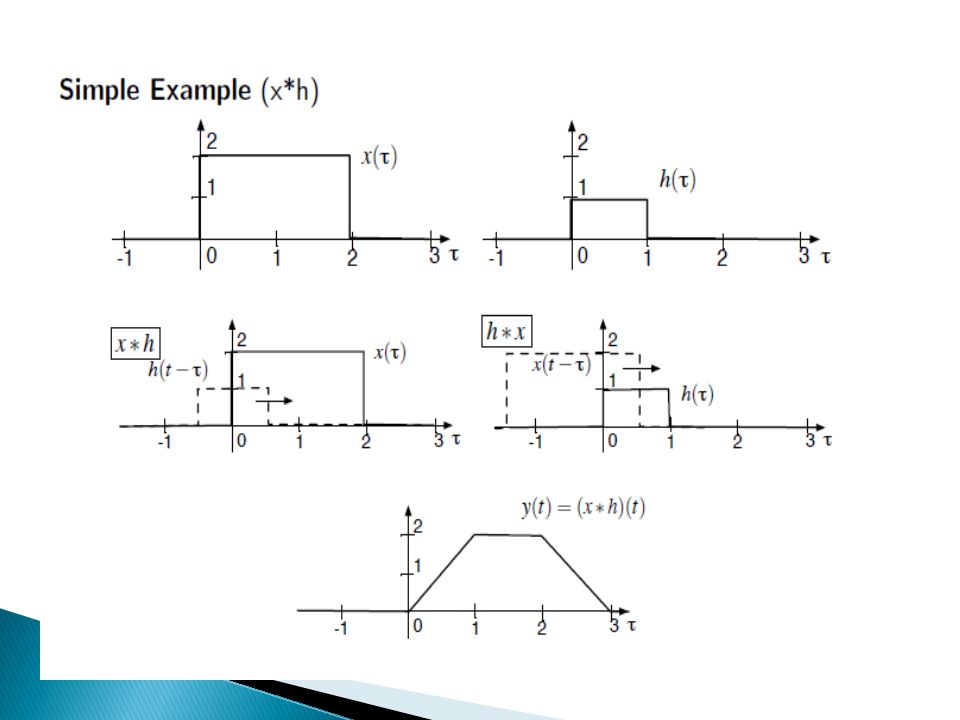
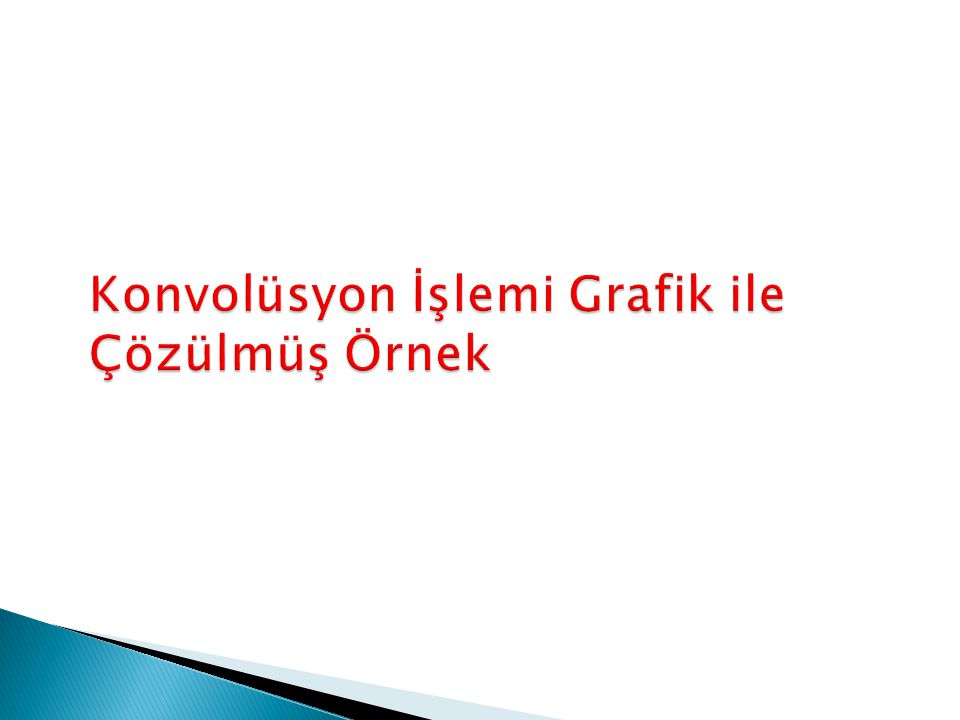
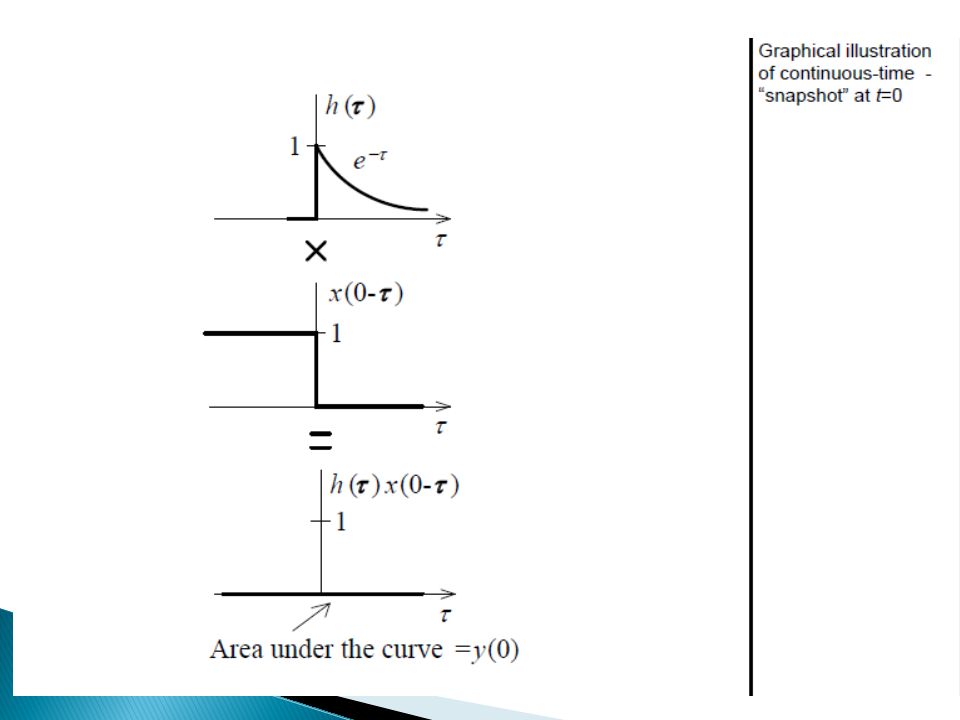
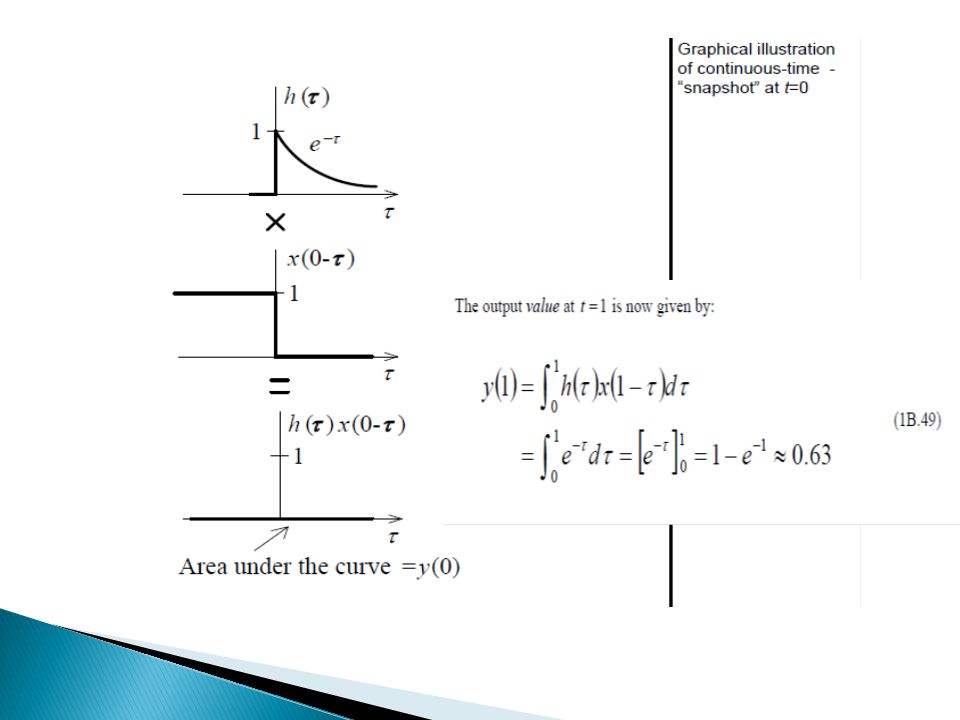
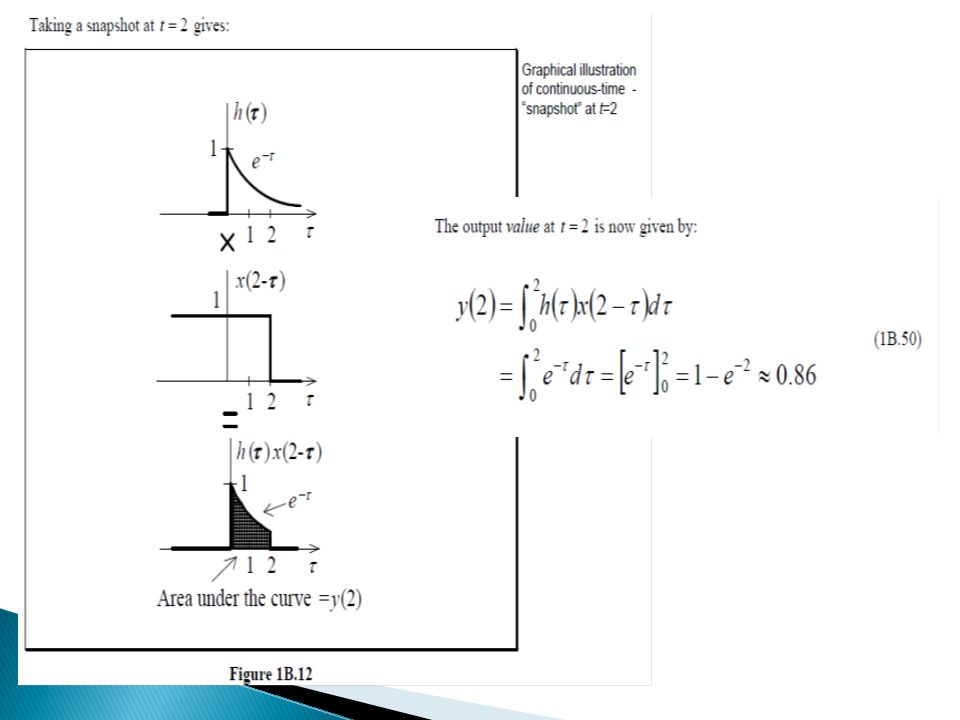
Y(t) = x(t)*h(t) = ? t=0
 = x(t)*h(t) = t=0")
48
Değişme Özelliği

50
Birleşme Özelliği

60
60 Time-Domain Representations of LTI Systems 2.8 Step Response 1. The step response is defined as the output due to a unit step input signal. 2. Discrete-time LTI system: Let h[n] = impulse response and s[n] = step response. 3. Since u[n k] = 0 for k > n and u[n k] = 1 for k ≤ n, we have

61
61 Time-Domain Representations of LTI Systems The step response is the running sum of the impulse response. Continuous-time LTI system: (2.34) The step response s(t) is the running integral of the impulse response h(t). ◆ Express the impulse response in terms of the step response as and Example 2.14 Example 2.14 RC Circuit: Step Response Fig. 2.12 The impulse response of the RC circuit depicted in Fig. 2.12 is Find the step response of the circuit. <Sol.> Figure 2.12 (p. 119) RC circuit system with the voltage source x(t) as input and the voltage measured across the capacitor y(t), as output.
 The step response s(t) is the running integral of the impulse response h(t). ◆ Express the impulse response in terms of the step response as and Example 2.14 Example 2.14 RC Circuit: Step Response Fig The impulse response of the RC circuit depicted in Fig is Find the step response of the circuit. <Sol.> Figure 2.12 (p. 119) RC circuit system with the voltage source x(t) as input and the voltage measured across the capacitor y(t), as output..")
62
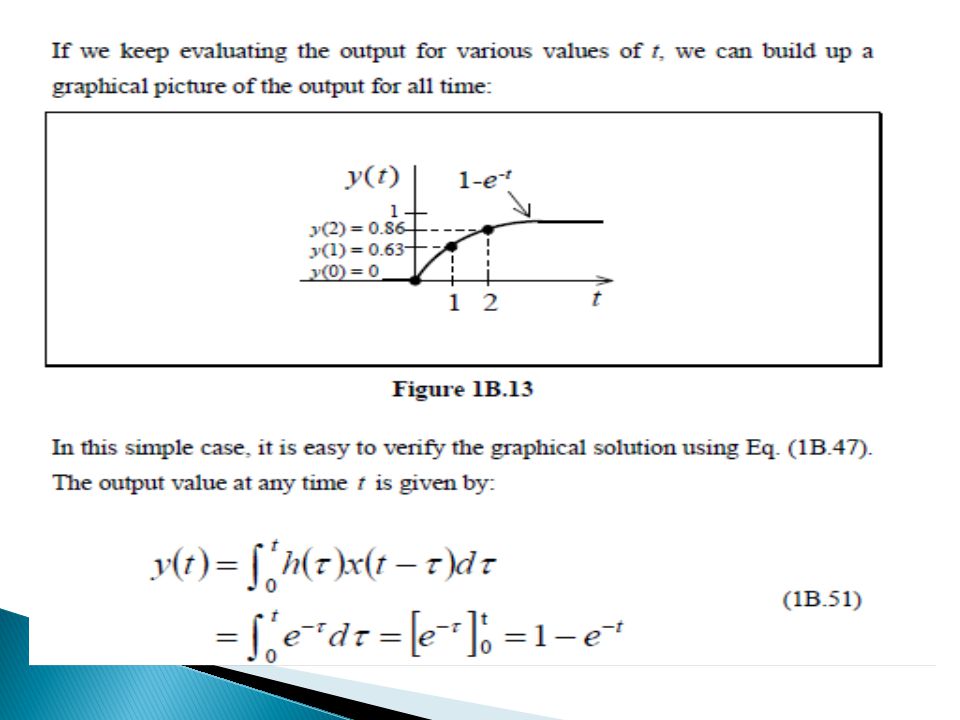
62 Time-Domain Representations of LTI Systems CHAPTER 1. Step response: Fig. 2.25 Figure 2.25 (p. 140) RC circuit step response for RC = 1 s.
 RC circuit step response for RC = 1 s..")
Benzer bir sunumlar















; Fs = 1000; t = 0:1/Fs:.3; x = cos(2*pi*t*200)+0.1*randn(size(t));>")






 Sistemlerin Frekans Tepkileri>")



>")

