3. Zamana bağlı performans ) s ( R Son değer teoremi: Parabolik girdi Adım girdi Rampa girdi
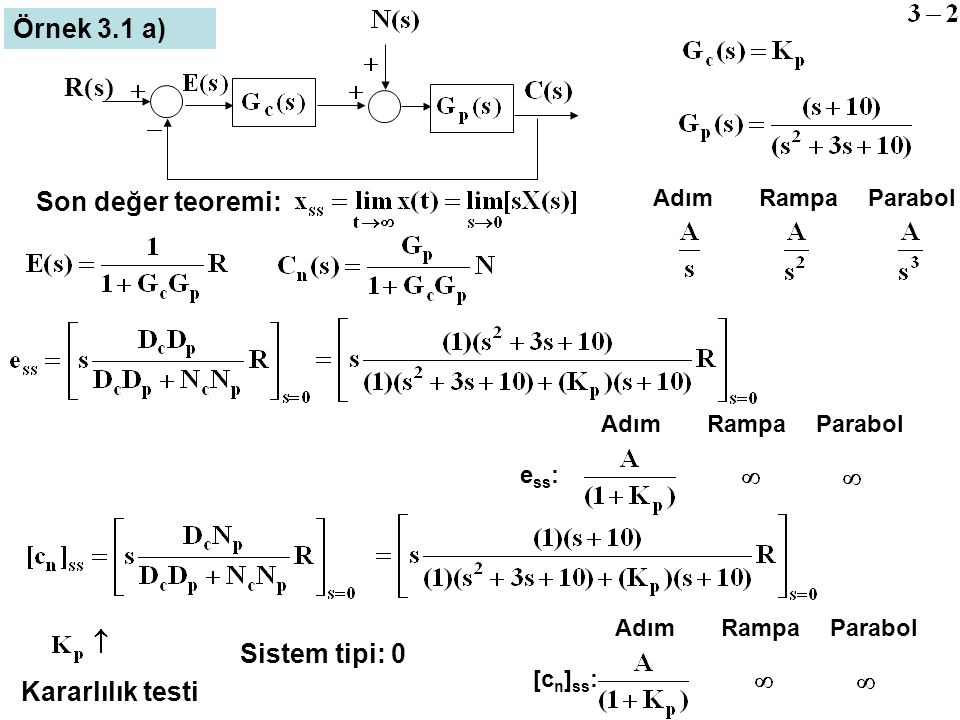
Örnek 3.1 a) ) s ( R Son değer teoremi: Sistem tipi: 0 Adım Rampa Parabol ess: Adım Rampa Parabol [cn]ss: Adım Rampa Parabol Sistem tipi: 0 Kararlılık testi
Integral kontrol hata performansını iyileştiriyor Örnek 3.1 b) ) s ( R ess: Adım Rampa Parabol Sistem tipi: 1 Integral kontrol hata performansını iyileştiriyor ess: Adım Rampa Parabol Sistem tipi: 0 Türevsel kontrol hata performansını değiştirmiyor
Örnek 3.1 d) ) s ( R Sistem tipi: 2 DcDp de s0 Sistem tipi: 0 Adım Rampa Parabol Sistem tipi: 2 DcDp de s0 Sistem tipi: 0 Aşma DcDp de s1 Sistem tipi: 1 DcDp de s2 Sistem tipi: 2 DcDp de s3 Sistem tipi: 3