Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
Bir TTCAN Sisteminde Matris Çevrimi Tasarımı: PSA Benchmark Örneği
Süleyman Halil TEMEL Mahmut TENRUH

2
SUNU PLANI CAN PROTOKOLÜ CAN SİSTEM ÖZELLİKLERİ ÇERÇEVE BİÇİMLERİ
TTCAN MATRİS ÇEVRİMİ PSA BENCHMARK UYGULAMASI SONUÇLAR

3
Denetleyeci Alan Ağı (CAN: Controller Area Network)
")
4
CAN Nedir? Araç içi gömülü sistemlerde kullanılan bir haberleşme protokolüdür.

5
CAN NEDEN GELİŞTİRİLDİ?
Araç içi Elektronik Kontrol Üniteleri (ECU) arası haberleşmeyi sağlamak Elektrik tesisatındaki kablo karmaşıklığını azaltmak
 arası haberleşmeyi sağlamak. Elektrik tesisatındaki kablo karmaşıklığını azaltmak.")
6
OTOMOBİL BAĞLANTILARI
MOTOR KONTROL İLETİM FRENLER SÜSPAN- SİYON ÖN PANEL IŞIK KOLTUKLAR İKLİM- LENDİRME OTOMATİK KİLİT HAVA YASTIĞI CAM

7
CAN İLE OTOMOBİL BAĞLANTILARI
MOTOR KONTROL İLETİM FRENLER SÜSPAN- SİYON ÖN PANEL IŞIK KOLTUKLAR İKLİM- LENDİRME OTOMATİK KİLİT HAVA YASTIĞI CAM YÜKSEK HIZ DÜŞÜK HIZ With a shared CAN bus, the size of the wiring harness is reduced because the sensors and actuators share a single High Speed or Low Speed bus. However, there is a small amount of additional overhead to interface devices using CAN.

8
CAN Kullanım Alanları Uygulama alanının genişliği Yüksek performans
Düşük maliyet Çok sayıda üretici

9
Yolcu Arabaları Kamyonlar Uçaklar Trenler Gemiler PLC Uygulamaları Robot Kontrolü Bina Otomasyonu Oyuncaklar Mekanik Araçlar Endüstriyel Otomasyon

10
CAN Sistem Özellikleri
İletişim olay tetiklemelidir. CAN hattında iletilen veri mesajlarında alıcı yada göndericinin adres bilgisi yoktur. Her mesajın eşsiz bir tanıtıcı kısmı vardır. Tanıtıcı verinin içeriğini belirtir. Mesajlar bütün istasyonlar tarafından onaylanır veya reddedilir. Mesajlar ilgili olma durumuna göre filtrelenir. İlgili ise alıcı tarafından işlenirler. Unlike TCP/IP Protocols, messages do not contain the address of either the sender or the receiver. Instead, they contain an identifier which identifies the message type. Identifiers must be unique throughout the network. All messages are broadcast to all nodes. On the receiving side, messages can be filtered by the CAN hardware based on their identifiers.

11
OSI ve CAN-TTCAN CAN protokolü OSI referans modelinde Veri İletim ve Fiziksel Katmanlara karşılık gelir.

12
Ortam Erişim Kontrolü(MAC)
CAN , taşıyıcı algılamalı çoklu ulaşım yöntemiyle birlikte çarpışma denetimli ve çözümlemeli bir yöntem uygular (CSMA/CD + CR) Ethernet’ten farklı olarak, paketler aynı anda iletilirse, yıkıcı olmayan bit karşılaştırma, öncelikli mesajın hatta erişmesine olanak sağlar. Like Ethernet, can uses Carrier Sense, Multiple Access with Collision Detection. Each controller can sense the bus before transmitting data (Carrier Sense), Several controllers have access to the bus at the same time (Multiple Access), and Collisions can be detected by hardware. However, unlike Ethernet, frames transmitted at the same time use a non-destructive, bitwise arbitration protocol, and the highest priority message gains access to the bus. Recall that as the bits are written to the bus, a 0 bit overwrites a 1 bit (during arbitration). This ensures that the highest priority message will always gain access to the bus.
 Ethernet’ten farklı olarak, paketler aynı anda iletilirse, yıkıcı olmayan bit karşılaştırma, öncelikli mesajın hatta erişmesine olanak sağlar. Like Ethernet, can uses Carrier Sense, Multiple Access with Collision Detection. Each controller can sense the bus before transmitting data (Carrier Sense), Several controllers have access to the bus at the same time (Multiple Access), and Collisions can be detected by hardware. However, unlike Ethernet, frames transmitted at the same time use a. non-destructive, bitwise arbitration protocol, and the highest priority message. gains access to the bus. Recall that as the bits are written to the bus, a 0 bit. overwrites a 1 bit (during arbitration). This ensures that the highest priority. message will always gain access to the bus.")
13
Bit-bit kararlaştırma

14
CAN Paket Biçimleri Veri Paketi (Data Frame)
Uzak Paket ( Remote Frame) Hata Paketi ( Error Frame) Aşırı yük Paketi (Overload Frame) Data is transmitted in Message Frames. In CAN Version 2.0A, Message Frames contain 11-bit identifiers, whereas CAN Version 2.0B, Message Frames contain 29-bit identifiers.
 Hata Paketi ( Error Frame) Aşırı yük Paketi (Overload Frame) Data is transmitted in Message Frames. In CAN Version 2.0A, Message Frames contain 11-bit identifiers, whereas. CAN Version 2.0B, Message Frames contain 29-bit identifiers.")
15
Standart ve Genişletilmiş CAN Çerçeveleri

16
Zaman Tetiklemeli CAN (TTCAN)
TTCAN, CAN yapısının değişmeden üzerine eklenen bir katman olarak tanımlanabilir. Bu üst seviye protokol, global bir sistem saati sağlayarak bütün istasyonların iletişim planlamasını senkronize eder. Bu protokol yüksek güvenlikli uygulamalar için geliştirilmiştir.

17
TTCAN TTCAN mutlak gerçek zamanlı sistemlerde yani mesajın doğru olarak iletilmesinin yanında tam zamanında iletilmesinin de önemli olduğu sistemlerde kullanılır. TTCAN klasik CAN katmanlarına zamanlamayı gerçekleştirmek için oturum (Session) katmanı ekler.
 katmanı ekler.")
18
TTCAN Olay tetiklemeli sistemden farklı olarak, zaman tetiklemeli sistemde mesaj iletimi bir zaman dizisiyle gerçekleştirilir ve bütün istasyonlar senkronize edilmiş, global saate ayarlanmıştır. Her mesajın kendine ait zamanı olduğu için herhangi bir çarpışma meydana gelmez.

19
TTCAN sadece güvenilir mesaj zamanlaması sağlamaz, aynı zamanda mevcut bant genişliğinin etkili kullanımını da sağlar. Güncel olay tetiklemeli CAN uygulamalarında ağdan yararlanma göreceli olarak düşüktür. Kritik olmayan uygulamalar için ağdan yararlanma %50 seviyesindedir ve mutlak gerçek zamanlı sistemler için ağdan yararlanma daha düşük, %20- %30 civarındadır. TTCAN ağ bant genişliğinden %90 seviyesinde yararlanır çünkü hata durumunda mesaj tekrar iletilmez, bir sonraki zaman slotunda iletilir.

20
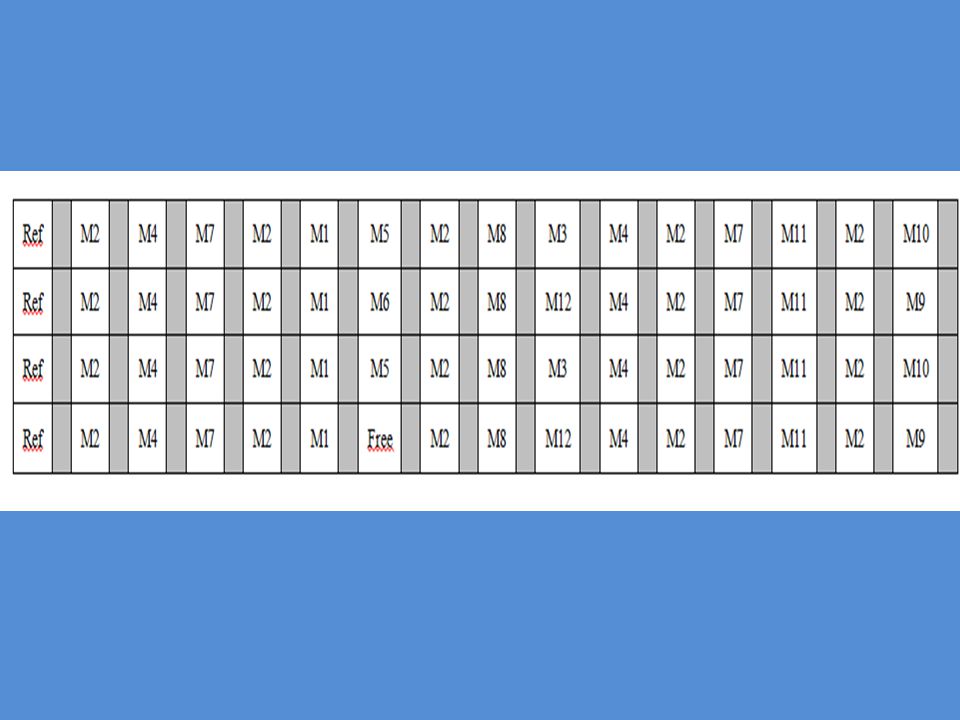
MATRİS ÇEVRİMİ Zaman tetiklemeli çizelge belirli sırada zaman pencerelerinden oluşur. Her mesaj penceresinde bir mesaj iletilebilir. Bütün olarak geçiş sırası matris çevrimi olarak bilinir ve ağ normal olarak çalışırken periyodik olarak tekrar eder. Matris çevrimi, bir referans mesajıyla başlayan ve bir sonraki referans mesajıyla son bulan temel çevrimlerden (BC-Basic Cycle) meydana gelir.
 meydana gelir.")
21
TTCAN Matris Çevrimi

22
ZAMAN PENCERELERİ Özel zaman Pencereleri ( Exclusive Time Windows) belirli bir mesaja atanırlar. Kararlaştırma Zaman Pencereleri ( Arbitration Time Windows) birden fazla mesaja atanırlar ve hatta meydana gelen karşılaşmalar, CAN bit-bit karşılaştırma yöntemiyle çözülür. Serbest Zaman Pencereleri (Free Time Windows) zaman aralıklarında herhangi bir mesaj içermeyen pencerelerdir. Ağın gelecekteki genişlemesi düşünülerek ayrılmışlardır.
 birden fazla mesaja atanırlar ve hatta meydana gelen karşılaşmalar, CAN bit-bit karşılaştırma yöntemiyle çözülür. Serbest Zaman Pencereleri (Free Time Windows) zaman aralıklarında herhangi bir mesaj içermeyen pencerelerdir. Ağın gelecekteki genişlemesi düşünülerek ayrılmışlardır.")
23
PSA Benchmark Motor Denetleyici Otomatik Vites Kutusu Denetleyicisi
1997 yılında Peugeot-Citroën tarafından araç içi ağlar düşünülerek geliştirilmiştir. CAN ağ yapısında bulunan 5 birim vardır. Motor Denetleyici Otomatik Vites Kutusu Denetleyicisi Kilitlemesiz Fren Sistemi (ABS) ve Araç Hareket Denetleyicisi Askılama Denetleyicisi Teker Açı Algılayıcı ve Hareketli Far Doğrulayıcı
 ve Araç Hareket Denetleyicisi. Askılama Denetleyicisi. Teker Açı Algılayıcı ve Hareketli Far Doğrulayıcı.")
24
PSA Ağı Yerleşimi

25
PSA Mesaj Seti

26
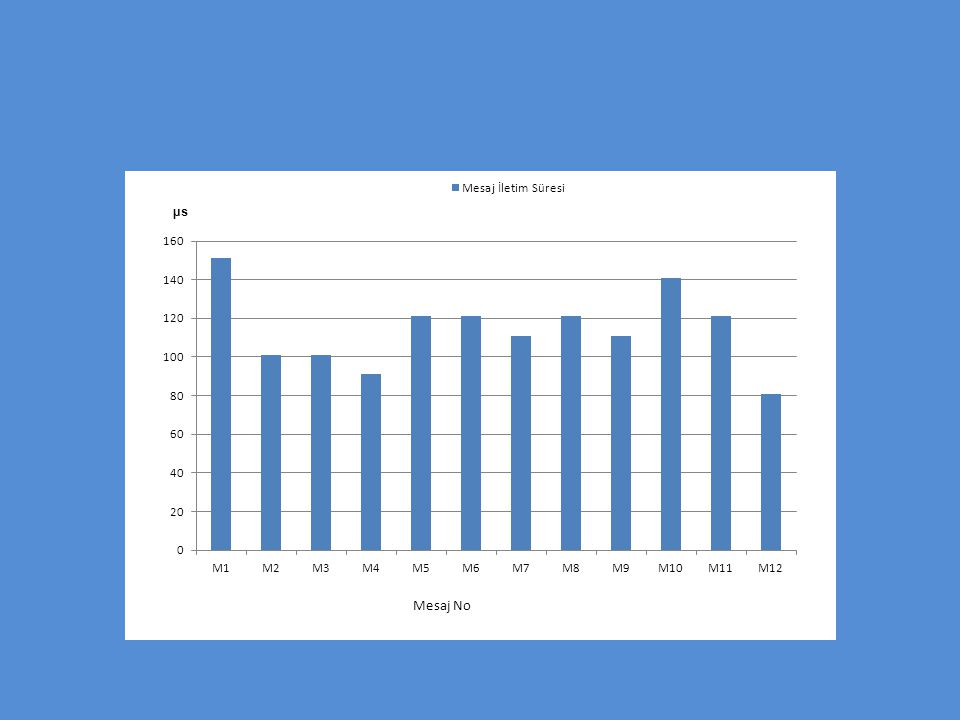
Matris Çevrim Değerleri

27
𝐶𝑚= 𝑠𝑚 𝑠𝑚 𝑇𝑏𝑖𝑡

28
34 bit: Senkronizasyon için bit ekleme yapılabilecek, sabit bit sayısını göstermektedir;
8sm: Byte olarak uzunluğu verilen veri boyutunun bit olarak hesaplanmasını sağlar. 4 bölen değeri: Senkronizasyon için eklenebilecek maksimum bit sayısının elde edilmesini sağlar. 47 sabiti: Standart CAN çerçevesinde veri alanı olmadan bulunan sabit bit uzunluğunu ifade eder. Tbit: Hattın bit zamanını ifade eder. Örneğin; 1 Mbps için 1µs, 500 Kbps için 2µs

33
SONUÇ CAN Protokolü öncelik eleme esaslı ortam erişim yöntemi kullanır. Bu durumda düşük öncelikli mesajların iletiminde gecikme meydana gelebilir. Gerçek zamanlı sistemlerde gecikme istenmeyen bir durumdur.

34
Bu çalışmada periyodik mesajların gecikmesiz iletimini sağlamayı amaçlayan bir TTCAN modeli geliştirilmiştir. PSA benchmark mesaj seti için azaltılmış matris çevrimi geliştirilmiştir. Simülasyon ile çakışma olmadan mesajların gecikmesiz iletilebildiği görülmüştür.

35
TEŞEKKÜRLER…

Benzer bir sunumlar


 Bilgisayarlar arası iletişimin başladığı günden itibaren farklı bilgisayar.>")








>")







,>")

 Uygulama>")