Dört Uzuvlu Mekanizmalar Dr. Sadettin KAPUCU TM 321 Mekanizma Tekniği Dört Uzuvlu Mekanizmalar Dr. Sadettin KAPUCU ©2003-2006 Sadettin Kapucu
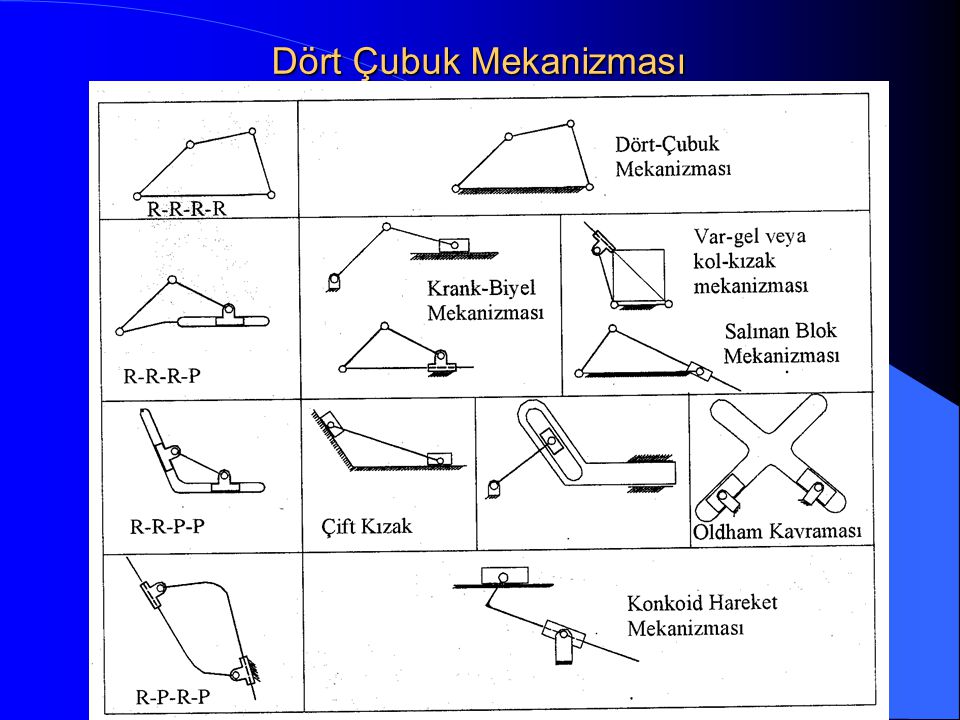
Dört Çubuk Mekanizması
Dört Çubuk Mekanizması Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir. 1- Fonksiyon sentezi q14 =f(q12)
Dört Çubuk Mekanizması 2- Yörünge sentezi (biyel eğrileri)
Dört Çubuk Mekanizması 3- Konum sentezi
Grasshof Teoremi Biyel Bu uzuv sabit uzva göre belirli aralıkta salınım yapabilir. Sarkaç A D C Bu uzuv sabit uzva göre tam bir dönme yapabilir. Krank
Grasshof Teoremi B Bu uzuv sabit uzva göre belirli aralıkta salınım yapabilir. Sarkaç A D C Bu meknizmaya Kol-Sarkaç Mekanizması diyoruz Bu uzuv sabit uzva göre tam bir dönme yapabilir. Krank
Grasshof Teoremi Bu uzuv sabit uzva göre tam dönme yapabilir. Krank B C Bu meknizmaya Çift-Krank veya Çift-Kol Mekanizması diyoruz Bu uzuv sabit uzva göre tam bir dönme yapabilir. Krank
Grasshof Teoremi B Bu uzuv sabit uzva göre belirli aralıkta salınım yapabilir. Sarkaç A C D Bu meknizmaya Çift-Sarkaç Mekanizması diyoruz Bu uzuv sabit uzva göre belirli aralıkta salınım yapabilir. Sarkaç
Grasshof Teoremi Grasshof teoremi uzuv boyutlarına bağlı olarak bu değişik dört çubuk mekanizmasını şu şekilde belirler: l = en uzun uzvun uzuv boyutu s = en kısa uzvun uzuv boyutu p,q = diğer uzuvların uzuv boyutları CD=l B CA=s AB=p BD=q A D C
İki değişik krank sarkaç mekanizması elde edilir. Grasshof Teoremi Eğer l+s<p+q ise İki değişik krank sarkaç mekanizması elde edilir. B B CD=l CA=s A AB=p A BD=q D C D C
En kısa uzuv sabitse çift krank elde edilir. Grasshof Teoremi Eğer l+s<p+q ise En kısa uzuv sabitse çift krank elde edilir. B CD=l CA=s AB=p A BD=q D C
En kısa uzuvun karşısındaki uzuv sabit ise çift sarkaç elde edilir. Grasshof Teoremi Eğer l+s<p+q ise En kısa uzuvun karşısındaki uzuv sabit ise çift sarkaç elde edilir. B CD=l CA=s AB=p A BD=q D C
Grasshof Teoremi Eğer l+s>p+q ise Bu durumda hangi uzuv sabit olursa olsun sadece değişik salılım açıları olan çift sarkaç mekanizmaları elde edilir. CD=l B CA=s AB=p A BD=q D C
Kritik konum oluştururlar Grasshof Teoremi Eğer l+s=p+q ise CD=l Kritik konum oluştururlar CA=s B AB=p A D BD=q B C A B A C D D C
Kol –sarkaç mekanizmalarının ölü konumları Ao A B Bo q12 q13 q14 B B A Bo Ao Bo Ao A Kapalı ölü konum Açık ölü konum
Kol –sarkaç mekanizmalarının ölü konumları B B A q13 A q14 q12 D Ao C Bo
Kol –sarkaç mekanizmalarının ölü konumları B B Salınım açısı Y A Y1 F b Bo Ao A
Bağlama Açısı m F B Fb Ft q13 T14 A q14 q12 T12 Ao Bo Çıkış uzvunu hareket ettirmeye çalışan kuvvet bileşeni Cıkış uzvu yataklarında oluşan yatak kuvveti bileşeni
Bağlama Açısı A m T12 T14 Ao F Fb Ft = - T14
Bağlama Açısı m B a3 a4 q13 A q14 a2 q12 Ao Bo a1
Bağlama Açısı m B a3 a4 q13 A q14 a2 q12 Ao Bo a1
Bağlama Açısı B B mmax mmin A Ao A Bo Ao Bo
Bağlama Açısı En uzun uzuv ile en kısa uzvun boyutu toplamı =4+8=12 Bir dört çubuk mekanizmasında uzuv boyutları a2=4, a3=8, a4=6, a1=7 dir. Grashof kuralına göre 1 uzvu sabit uzuv 2 uzvu krank olmak üzere bu mekanizmanın bir kol-sarkaç olduğunu gösterin, salınım açısını, karşı gelen kol dönme açısını ve en kritik bağlama acısını bulun. En uzun uzuv ile en kısa uzvun boyutu toplamı =4+8=12 Diğer iki uzvun toplamı=6+7=13 12<13
Bağlama Açısı B Açık ölü konum A Y1 b Bo Ao A Bir dört çubuk mekanizmasında uzuv boyutları a2=4, a3=8, a4=6, a1=7 dir. Grashof kuralına göre 1 uzvu sabit uzuv 2 uzvu krank olmak üzere bu mekanizmanın bir kol-sarkaç olduğunu gösterin, salınım açısını, karşı gelen kol dönme açısını ve en kritik bağlama acısını bulun. B Açık ölü konum A Y1 b Bo Ao A
Bağlama Açısı Kapalı ölü konum B A F Y2 b Bo Ao A Bir dört çubuk mekanizmasında uzuv boyutları a2=4, a3=8, a4=6, a1=7 dir. Grashof kuralına göre 1 uzvu sabit uzuv 2 uzvu krank olmak üzere bu mekanizmanın bir kol-sarkaç olduğunu gösterin, salınım açısını, karşı gelen kol dönme açısını ve en kritik bağlama acısını bulun. Kapalı ölü konum B A F Y2 b Bo Ao A
Bağlama Açısı B B Y A Y1 F b Bo Ao A Bir dört çubuk mekanizmasında uzuv boyutları a2=4, a3=8, a4=6, a1=7 dir. Grashof kuralına göre 1 uzvu sabit uzuv 2 uzvu krank olmak üzere bu mekanizmanın bir kol-sarkaç olduğunu gösterin, salınım açısını, karşı gelen kol dönme açısını ve en kritik bağlama acısını bulun. B B Y A Y1 F b Bo Ao A