Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
BTÖ216-Görsel Programlama RobotC’ye Giriş

2
Problem Çözme “Nasıl iyi bir programcı olabilirim?” İlk adım problemi nasıl çözeceğini anlamadır. Problem çözme programlamanın özüdür.

3
Problem Çözme

4
STAIR problem çözme süreci STAIR problem çözme süreci S tate the problem (Problemi tanımlayın) Identify the t ools available for solving the problem (Problemi çözmek için mevcut araçları belirleyin) Write an a lgorithm (Bir algoritma yazın) I mplement the solution (Çözümü gerçekleştirin) R efine the solution (Çözümü sadeleştirin)
 Identify the t ools available for solving the problem (Problemi çözmek için mevcut araçları belirleyin) Write an a lgorithm (Bir algoritma yazın) I mplement the solution (Çözümü gerçekleştirin) R efine the solution (Çözümü sadeleştirin)")
5
STAIR sürecinin programlamaya uygulanması S tate the problem (Problemi tanımlayın) It begins by stating the problem, defining the problem, and understanding the problem Identify the t ools available for solving the problem (Problemi çözmek için mevcut araçları belirleyin) RobotC – NXT 2.1 programming environment Write an a lgorithm (Bir algoritma yazın) An algorithm is a well-defined, finite, step-by-step process for solving a problem. I mplement the solution (Çözümü gerçekleştirin) Use tools and algorithms to build a solution R efine the solution (Çözümü sadeleştirin) Testing the solution, fixing bugs, and making enhancements
 Use tools and algorithms to build a solution R efine the solution (Çözümü sadeleştirin) Testing the solution, fixing bugs, and making enhancements.")
6
Algoritma Akış diyagramı Pseudocode yazma SPA (Sense, Plan, Act): Robot kontrol prosedürü. Robotların etkili bir biçimde çalışması için gerekli 3 önemli beceri.

7
Akış Diyagramı Sembolleri ve Fonksiyonları Dikdörtgen: İşlem Baklava: Karar Paralel Kenar: Giriş ya da Çıkış Daire: Bağlantı Ok: Akış yönü Oval: Başlama ya da Durma noktası

8
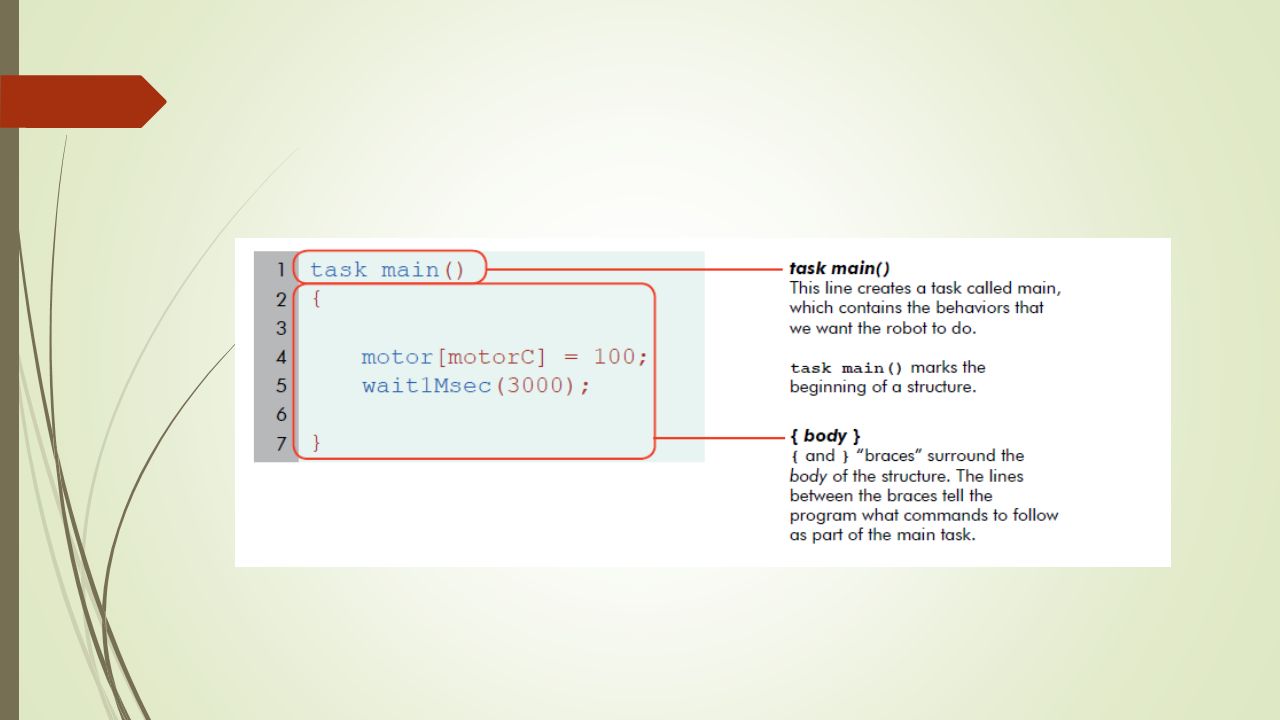
Kontrol Yapıları - Control Structure

10
Program Kodu

11
Kod Renklendirme

12
Büyük-Küçük Harf Hassasiyeti

13
Sıra - Sequence

14
Boşluk Kullanma

15
NOKTALAMA İŞARETLERİ Noktalı Virgül (;) kullanımı
 kullanımı")
16
Parantezler

17
Açıklama Satırı - Comments

18
ROBOTC KOMUTLARI Display - Ekran Motor Sound - Ses Wait - Bekleme

19
DISPLAY komutları task main() { nxtDisplayTextLine(4, " Merhaba Dunya "); wait1Msec(3000); }
 { nxtDisplayTextLine(4, Merhaba Dunya ); wait1Msec(3000); }")
20
NXT LCD ekranı koordinatları

21
task main() { nxtDisplayTextLine(1, " Merhaba Dunya "); nxtDisplayBigStringAt(10, 36, "Merhaba"); nxtDisplayBigStringAt(10, 20, "Dunya"); wait1Msec(10000); eraseDisplay(); }
 { nxtDisplayTextLine(1, Merhaba Dunya ); nxtDisplayBigStringAt(10, 36, Merhaba ); nxtDisplayBigStringAt(10, 20, Dunya ); wait1Msec(10000); eraseDisplay(); }")
22
MOTOR Komutu task main() { motor[motorB] = 50; motor[motorC] = 50; wait1Msec(2000); }
![MOTOR Komutu task main() { motor[motorB] = 50; motor[motorC] = 50; wait1Msec(2000); }](http://images.slideplayer.biz.tr/28/9354035/slides/slide_22.jpg "MOTOR Komutu task main() { motor[motorB] = 50; motor[motorC] = 50; wait1Msec(2000); }")
23
SOUND komutları task main() { PlaySound(soundFastUpwardTones); wait1Msec(2000); PlaySound(soundBeepBeep); wait1Msec(2000); PlaySound(soundLowBuzz); wait1Msec(2000); }
 { PlaySound(soundFastUpwardTones); wait1Msec(2000); PlaySound(soundBeepBeep); wait1Msec(2000); PlaySound(soundLowBuzz); wait1Msec(2000); }")
24
WAIT komutları wait1Msec(2000); wait10Msec(2000);
; wait10Msec(2000);")
Benzer bir sunumlar
>")













 “nereden başlamalı ?”>")




