Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
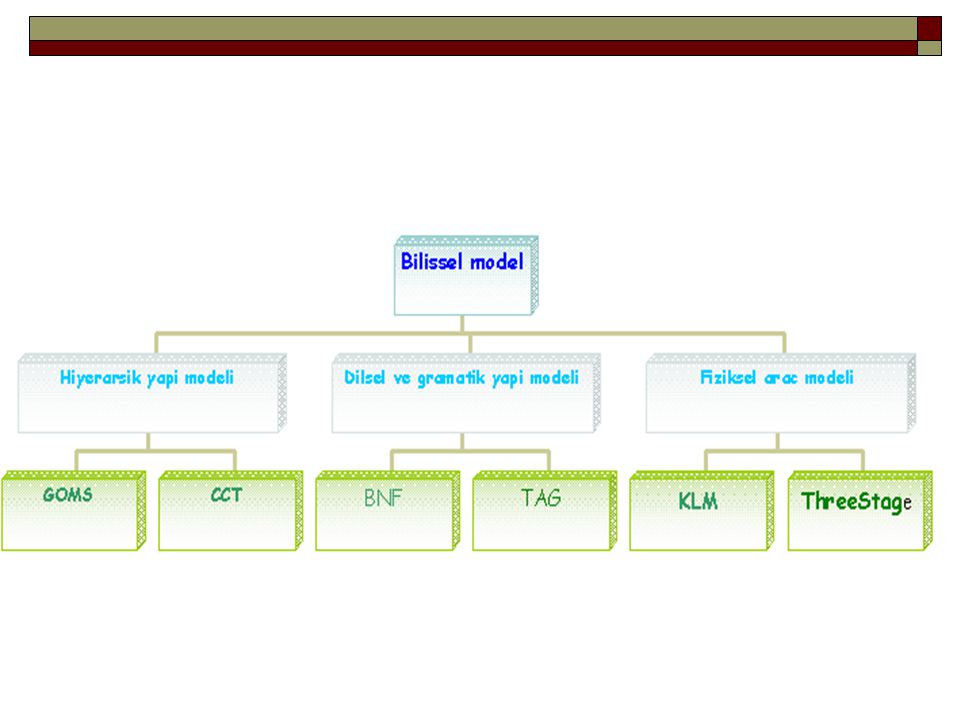
Bölüm 12: Bilişsel Modeller (Cognitive Models)
İnsan-Bilgisayar Etkilesimi Olgu Mert

2
Modeller ve teknikler insan-arayüz arasındaki etkileşimi kullanıcının anlama, bilme, niyet, ve sürecine göre şekillenmiştir. Yüksek seviyeli amaçların ve problem çözme aktivite sonuçlarından , fareye tiklamak, tusa basmak gibi motor becerilerin gösterim seviyelerine kadar teknikten teknige farklılık göstermektedir.

4
Amaç ve Görev Hiyerarşileri
Amaçlar Niyetler doğru olduğunu düşündüğümüz şeyler Görevler Eylemler Nasıl başacağız GOMS amaçlar, içseldir. HTA eylemler, dışsaldır. görevler,soyutlamalardır

5
Amaç ve Görev Hiyerarşileri
Çoğu model, kullanıcıların amaçlarını basarmaları için amacı alt amaçlara parçalamak ve bu parçaları başararak asıl amaca ulaşma zihinsel modelini kullanmaktadir. (divide-conquer)
")
6
Rutin öğrenilen davranışlar, problem çözme yok Çelişki Hata
Granülleşme Nerede başlıyoruz Nerede bitiriyoruz Rutin öğrenilen davranışlar, problem çözme yok Çelişki Amacı başarmak için birden fazla yol Hata

7
Amaç ve Görev Hiyerarsileri
Granullesme : amacimizi ya da gorevimizi analiz etmeye farkli noktalardan baslayabiliriz ve nerede bitireegimizi iyi tespit etmemiz gerekir. Anlamli butunler olmalilardir.Amaclar parcalandigi gibi genisletilebilimektedir. Ornek : Amacimiz yemek yiyip karnimiz doyurmak iken ayni zamanda hayatta kalabilmegi basarmaktir da. Hiyerarsiler genellikle daha rutin, ogrenilebilir davranislar ile sinirlanmaktadir. Bu tur soyut gorevler ‘gorev birimi’ olarak adlandirilir. Gorev birimleri kullanici icin herhangi bir problem cozme becerisi gerektirmez iken , gorev birimlerini belirlemek icin tasarimcinin problem cozme becerisinin gelismis olmalidir. Hatali davranislar, mukemmel kullanici olmadigini dusundugumuzde hiyerarsiler kullaniciya nasil davranmasi gerektigini iyi gostermelidir.

8
Amaç ve Görev Hiyerarşileri
GOMS ve CCT iki modelidir. Goms; çoğu bilişsel modelin ya temelini oluşturmakta ya da diğer modeller bir şekilde GOMS yapısıyla ilişkisi bulunmaktadır.

9
GOMS GOAL (amac) istenilen sey , bellekteki cikis noktamiz
OPERATOR (islem) dusuk seviye analizler sistemi kullanmak icin yapmasi gereken basit davranislar METHOD (yontem)amacımızı parçalarken kullanabileceğimiz farklı yollar SELECT (secim) yöntemde yer alan farklı yollardan birisinin tercih edilmesi
 dusuk seviye analizler sistemi kullanmak icin yapmasi gereken basit davranislar. METHOD (yontem)amacımızı parçalarken kullanabileceğimiz farklı yollar. SELECT (secim) yöntemde yer alan farklı yollardan birisinin tercih edilmesi.")
10
GOMS GOAL: CLOSE-WINDOW . [select GOAL: USE-MENU-METHOD
. MOVE-MOUSE-TO-FILE-MENU . PULL-DOWN-FILE-MENU . CLICK-OVER-CLOSE-OPTION GOAL: USE-CTRL-W-METHOD . PRESS-CONTROL-W-KEYS] For a particular user: Rule 1: Select USE-MENU-METHOD unless another rule applies Rule 2: If the application is GAME, select CTRL-W-METHOD

11
CCT (Cognitive Complexity Theory) Bilişsel Karmaşıklık Teorisi
Temeli GOMS yapısının amacı parçalamasına ilkesine dayanmaktadır. Biraz daha kestirimsel güç sağlanarak zenginleştirilmiştir. Kullanıcı amacı ve bilgisayar sistemi olarak iki paralel tanımlamaya sahiptir. Kullanıcı amacı GOMS yapısına benzemekle birlikte öncelikli olarak “ürün kuralları” olarak ifade edilir. Bir dizi kurallar bütünü olan ürün kuralları dizimi şu şekilddeir. İf condition then action “condition ” kısa süreli belleğimiz ile ilgili unsurlardır. Durum gerçekleştiğinde bir ya da birden fazla basit elemandan oluşan “action” kısa süreli belleğimizdeki değişime göre gerçekleşir.

12
CCT Unix ‘vi’ editorü ile düzenleme örnegine baktığımızda yaygın bir hata olarak bilinen boşluk karakteri eklemede kullanıcının klavye vuruşları gözlendiğinde, bir kerede doğru pozisyonda olma, prosedürlesme kavramı gündeme gelir. Boşluk karakteri ekleme oldukça alışılmış bir harekettir; fakat bu durum uzman için geçerlidir. Tabi ki acemi kullanıcılar aynı klavye vuruşunu gerçekleştirebilir; fakat kısa süreli belleğinde gerçekleşen eylemler farklı olacaktır.

13
CCT CCT, acemiler kullanıcılar icin durum ve hareketleri kısıtlandıracak şekilde farklı kurallar oluşturmuştur. Bu kurallar, her klavye vuruşundan sonra sistemden gelecek dönütü kontol ederek analizi gerçekleştirmek için sıkça kısa süreli belleklerini calıştırmasını sağlamak amaçlıdır. Acemi davranışları prosedürleşmeyi amaçlamamaktadır. Hata olgusunu aciklayabilr; fakat daha onceden bu durumu kestiremez.

14
CCT ve Problemler Üretim kuralları ne kadar çok ise arayüzünün öğrenilmesi o kadar zordur. Üretim kuralları, aynı zamanda bir kaç planın gerçekleşmesini mümkün kılabilir. Örneğin bir yazar kitap yazarken çay icebilir bu iki aktivitenin kuralları simultane olarak aktif olabilir. Bu esnekliğe rağmen nedeni bilinmemekle birlikte CCT bu esnekligi kullanmaz. Arayüzün kullanımı için kullanıcının aynı davranışının farklı gösterimi olabilir. Üretim kuralları sadece insanlarin proseduresmis bilgilerini hatırlatma yolu olarak iyi bir model olarak gösterilir.

15
Görüntü Tabanlı Sistem Zorlukları
Hiyerarşik yapılar ve gramer tabanlı teknikler de başlangiçta geliştirilen sistemlerin etkileşimi klavye, fare ya da komut tabanlı olarak geliştirilmiştir.Düşük seviyeli söz dizimsel yapılardır. Günümüzde gelişmiş modern arayüzlere genelleme yapma konusunda önemli endişeler vardır. Bu iki teknikte de sistem çıktısında kullanıcının ne göreceğini göz ardı etmiştir.

16
Dilsel ve Grametiksel Yapilar
Kullanıcı ile sistem arasındaki etkileşim dil yapısı içinde incelenmektedir. Bu durumda bu konu içinde farklı bir kaç dil modeli geliştirilmesi sürpriz bir durum değildir. Arayüzün bilişsel zorluğunu analiz etmek ve kullanıcının davranışını anlamak amacıyla teklifler sunmaktadır. Backus–Naur Form (BNF) Task–Action Grammar (TAG)
 Task–Action Grammar (TAG)")
17
BNF Anlamsal olmayan sadece sözdizimsel diyaloglardır.
Bilgisayar programlama dillerinin sözdizimsel yapısının geniş bir şekilde belirlemektedir. Bir çok sistemin diyalogları BNF kuralları ile kolayca açıklanabilir. Tanımlamalar Terminal ve Non-Terminal olmak üzere iki çeşittir. Terminal tanımlar düşük seviyeli kullanıcı davranışlarını açıklar.(kullanıcının fare butonuna tıklaması gibi ). Non-terminal ise bunların dışında kalan terimleri açıklar. Daha üst seviyedir.
. Non-terminal ise bunların dışında kalan terimleri açıklar. Daha üst seviyedir.")
18
BNF Basit syntax nonterminal ::= expression An expression
contains terminals and nonterminals combined in sequence (+) or as alternatives (|) draw line ::= select line + choose points + last point select line ::= pos mouse + CLICK MOUSE choose points ::= choose one | choose one + choose points choose one ::= pos mouse + CLICK MOUSE last point ::= pos mouse + DBL CLICK MOUSE pos mouse ::= NULL | MOVE MOUSE+ pos mouse
 or as alternatives (|) draw line ::= select line + choose points + last point. select line ::= pos mouse + CLICK MOUSE. choose points ::= choose one | choose one + choose points. choose one ::= pos mouse + CLICK MOUSE. last point ::= pos mouse + DBL CLICK MOUSE. pos mouse ::= NULL | MOVE MOUSE+ pos mouse.")
19
BNF İle Ölçümler Kuralların sayısı + ve | operatörlerinin sayısı
Zorlukları Farklı anlamlar için aynı sözdizimi Kullanıcı algısının yansımaması Minimal tutarlılık kontrolü

20
Task Action Gramer (TAG)
Daha net tutarlılık : BNF ölçümlerine dayanmakla birlikte BNF yi yeteri kadar bilişsel olmamakla eleştirmiştir.Dil yapısının ve dil içindeki harf ve isimlerin komut olarak kullanmayı tutarlılığı sağlamak amacıyla kullanması gerektiğini savunmuştur. Kullanıcı bilgisini şifrelemek:Bu tür problemleri aşmak için kullanıcının dünya bilgisinin ile gramer yapısını tutarlılığı vurgulamaya çalışmıştır. Gramer kuralları : cp copying files mv moving files Semantik özellikler eklemeye uygundur.

21
TAG Tutarlılık In BNF, three UNIX commands would be described as:
copy ::= cp + filename + filename | cp + filenames + directory move ::= mv + filename + filename | mv + filenames + directory link ::= ln + filename + filename | ln + filenames + directory No BNF measure could distinguish between this and a less consistent grammar in which link ::= ln + filename + filename | ln + directory + filenames

22
Fiziksel araç modelleri
The Keystroke Level Model (KLM) : Buxton's 3-state model
 : Buxton s 3-state model.")
23
KLM Etkileşimde “birim görevler” amaçlamaktadır.
Zamanımızı 20 sn den fazla almayacak sıralı, basit komutların çalıştırılması ile ilgilenmektedir. GOMS un en düşük seviyesi 6 çalıştırıcı durum operatörü Fiziksel motor K-keystroking P-pointing H-homing D-drawing Mantık M-mantıksal hazırlık Sistem R-responce Deneysel olarak belirlenen zamanlar Texecute = TK + TP + TH + TD + TM + TR

24
Buxton’s Three-Stage Model
Sistemleri kullanmak icin giriş birimleri vardır. Fare, trackball, lightpen…vb . Bu araçlar aynı uygulamaları yapıyor gibi gözükse de farklı motor- duyu karakterlerine sahiptirler. Buxton giriş araçları ile ilgili olarak basit bir model geliştirmiştir.

25
Buxton’s Three-Stage Model
Fare icin ; State 1Herhangi bir butona basmadan sadece hareket ettirme durumunda fare kursoru sadece hareket eder State 2 Butona basarak hareket ettirirsek bir nesnenin sürüklenmesi sonucu ortaya çıkar.

26
Buxton’s Three-Stage Model
Light Pen icin ; State 0 Ekrana dokunulmaz ise , sistem izleme olayını gercekleştiremez. (no feedback) State 1 Dokunma işleminde sistem izlemeye başlar.
 State 1 Dokunma işleminde sistem izlemeye başlar.")
27
Tesekkurler…

Benzer bir sunumlar







>")











