Sunuyu indir
1
Celal Bayar Üniversitesi Biyomekanik Dersi Yürüyüşün Biyomekaniği
Yrd. Doç. Dr. B. Burak ÖZHAN Songül Gürbüz Ömer Faruk Taş Burak Gül

2
Hareket Konumda meydana gelen değişiklik , yer değiştirme.
Hareket işlevinde Newton’un 3 kanunu ; 1-Eylemsizlik 2-Hareket 3-Reaksiyon uygulanır.

3
İnsan Nasıl Hareket Eder ?
Bir insanın hareket edebilmesi için iskelet sisteminin yanı sıra kas sistemine ihtiyacı vardır.İskeleti oluşturan tüm kemikler kaslara bağlıdır.Kas kasılırken,kemikleri çeker ve onların hareket etmesini sağlar.Böylece hareketimiz gerçekleşir.

4
Hareket yapılmak istendiği anda, beyinden bir elektrik sinyali yola çıkarılır. Bize karmaşık gelen bu yolculuk sırasında sinyal öncelikle omuriliğe uğrar, oradan ilgili organa doğru hızla yol alır. Elektrik akımıyla, kası oluşturan milyonlarca motor uyarılır, sinyali alan lifler derhal kasılır.

5
Yürüyüş Yürüyüş insanın doğasında vardır ve refleks olarak gerçekleşmektedir. Global yürüme parametrelerini incelediğimizde ayağın yerde olduğu süreye duruş (stance) ve yerden ayrıldığı süreyede salınım (swing) fazı denir. Normal yürüyüşün yaklaşık %60’lık bölümü duruş (basma) %40’lık bölümü salınımla geçer.
 ve yerden ayrıldığı süreyede salınım (swing) fazı denir. Normal yürüyüşün yaklaşık %60’lık bölümü duruş (basma) %40’lık bölümü salınımla geçer.")
6
Yürüyüşün Safhaları

7
Bir bireyin yürümesi,koşması,bisiklet sürmesi için gerekli enerji
Bir bireyin yürümesi,koşması,bisiklet sürmesi için gerekli enerji.Daha çok güç sarfedip kilo kaybetmek için 2-3 m/s nin altında hızla hareket edeceksek yürümeli, üzerinde hareket edeceksek koşmalıyız.

8
Yürüyüş Analizi Yürüme sırasında topuğun yere değmesinden sonra aynı topuğun yine yere değmesine kadar oluşan olaylar bütününe yürüme çevrimi denir ve bu çevrim basma ve salınım olarak iki faza ayrılır.

9
İnsan yürüyüşü ile ilgili mekanik (kuvvet ve hareket) parametrelerin saptanması. Temel Amaç: - Normal yürüyüşü sayısal verilerle, bireysel farklılıklardan bağımsız olarak tanımlamak, -Normalden farklı yürüyüş şeklini, bu farklılığın altında yatan patoloji veya fonksiyonel adaptasyon ile ilişkilendirmek

10
Yürüyüş Analizi – Biyomekanik Parametreler
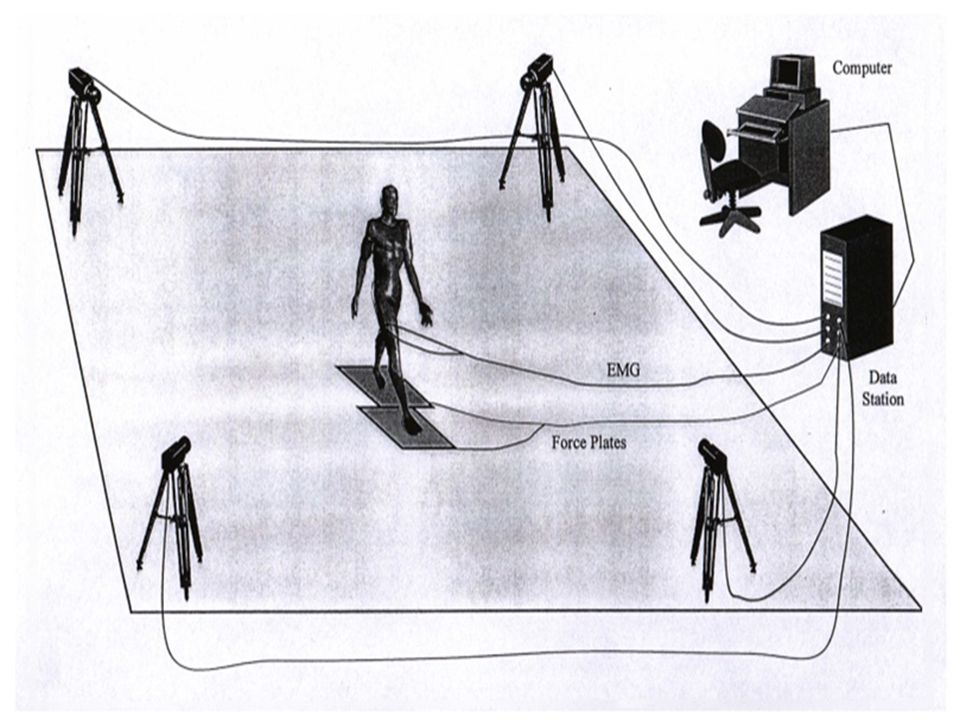
- Zaman – Uzaklık Parametreleri : Hız, adım uzunluğu, iki adım uzunluğu ,yürüyüş çevriminin zamanlaması vs - Yer Tepki Kuvvetleri - Eklem açıları (ayak bileği , diz, kalça ) - Eklem güçleri - Pelvis hareketi - Enerji harcanımı (mekanik, metabolik ) - EMG kayıtları
 - Eklem güçleri - Pelvis hareketi - Enerji harcanımı (mekanik, metabolik ) - EMG kayıtları.")
11
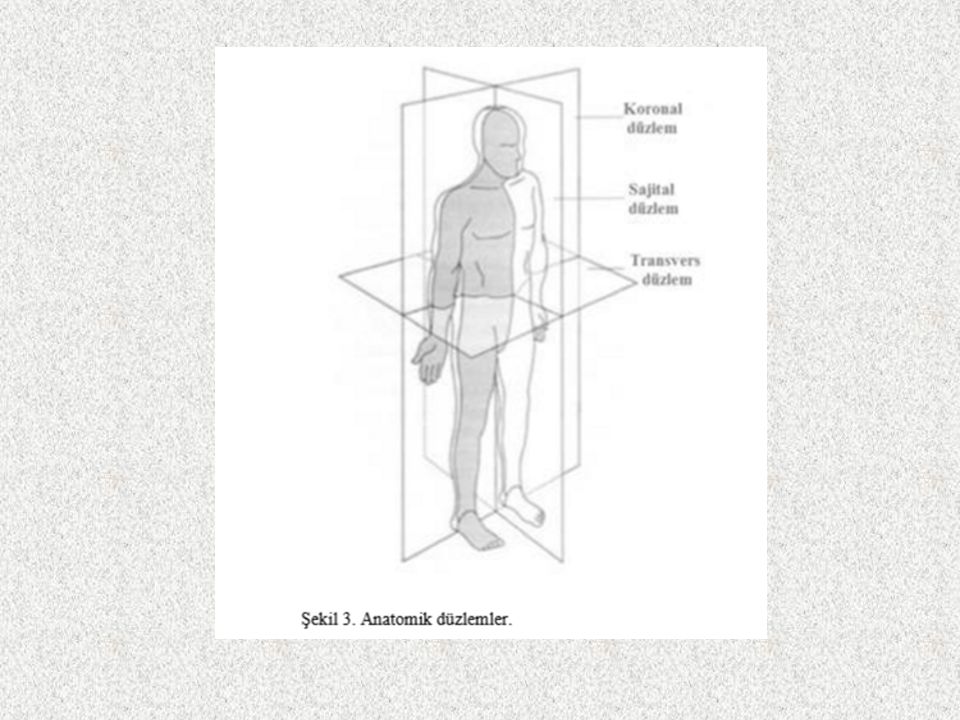
Değişkenler Yürüyüş hızı, yürüyüş ritmi, basma fazı yüzdesi, saggital, koronal ve transvers düzlemde gövde, pelvis, kalça, diz ve ayak bileğinde oluşan eklem rotasyon açılarıdır

15
Kızılötesi ileri teknoloji ile çalışan bir tarayıcı (Podoscanalyser) kullanılarak gerçekleştirilebilir.
 kullanılarak gerçekleştirilebilir.")
16
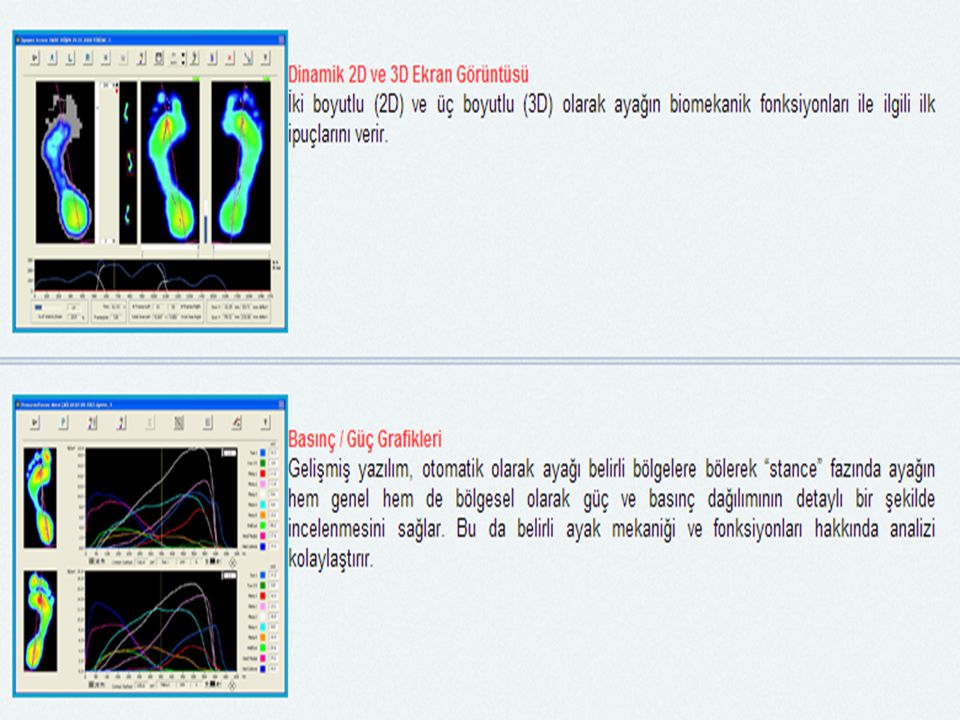
Kuvvet Platformları (Kuvvet Ölçerler) Yürüyüş yoluna yerleştirilmiş basınç sensörleri sayesinde ayak basıncını algılayarak bilgisayar ortamına aktarırlar. Ayakaltında oluşan max. kuvvet, max. gerilme, gerilme dağılımı, gerilme merkezi gibi birçok veriyi elde edebilmek mümkündür. Denge halindeki ayakta durma için statik veriler elde edebileceğimiz gibi yürüme, koşma, zıplama vb durumlardaki dinamik verilere de ulaşabiliriz. Örneğin kuvvet platformlarıyla elde edilen yer tepki kuvveti değerlerini yürüyüş analizi çalışmalarında diğer hareket analizi verileri ile beraber kullanarak yürüme, koşma gibi fonksiyonları yapabilmemiz için gerekli olan eklem momentlerini hesaplanabilir.

19
Yürüyüş Devri

20
1. Temas Aşaması Temas aşaması, calcaneus’ un(topuk kemiği) yanal sınırı üzerine topuk vuruşuyla başlar. Tibia(kaval kemiği) içten döner ve ayak,temas aşaması boyunca eklemde içe doğru basar. Temas aşamasının bitiminde metatarsallar(ayak tarağı) tamamen yüklenene kadar ayak medial olarak döndüğü sürece son metatarsal zeminle temas eder. Temas aşaması, ayağı bir mobil adaptöre ve şok emme mekanizmasına çevirmek için tasarlanmıştır. .
 yanal sınırı üzerine topuk vuruşuyla başlar. Tibia(kaval kemiği) içten döner ve ayak,temas aşaması boyunca eklemde içe doğru basar. Temas aşamasının bitiminde metatarsallar(ayak tarağı) tamamen yüklenene kadar ayak medial olarak döndüğü sürece son metatarsal zeminle temas eder. Temas aşaması, ayağı bir mobil adaptöre ve şok emme mekanizmasına çevirmek için tasarlanmıştır. .")
21
2. Orta duruş aşaması Orta duruş aşaması ayağı bir mobil adaptörden sert bir seviye koluna çevirir. Bu aşama esnasında,tibia dışarıdan döner ve ayak, ayağı itiş aşamasına hazırlayan subtalar eklemde dışa doğru basar.

22
3. İtiş Aşaması İtiş aşaması topuk kalkışında başlar; topuk kalkmadan hemen önce subtalar eklem nötr pozisyona yaklaşmalıdır. Burada ayağın ön ve arkası etkili parmak basışını sağlamak için birlikte kilitlenir. Ayak , dış tibial dönüşüyle parmak yerdeyken içe basmaya devam eder.

23
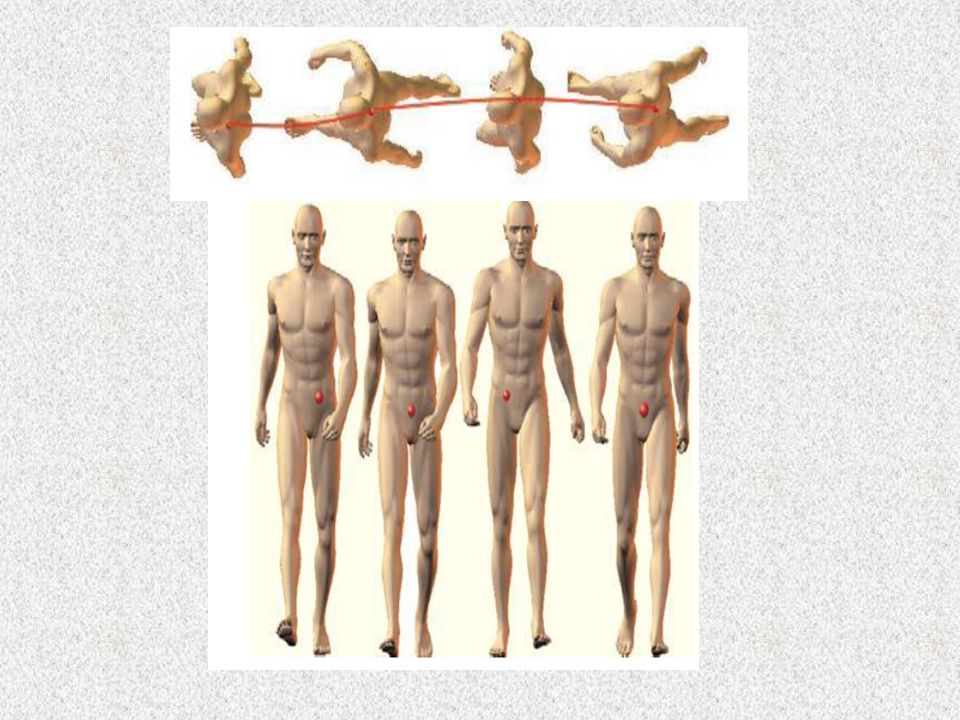
Vücut Ağırlık Merkezi Hareket eden bir cismin ağırlık merkezi de hareket yönünde ilerler. Vücut öne doğru ilerlerken yukarı-aşağı hareketinde en yüksek noktaya basma ortası fazında ulaşır, en alçak noktası ise çift destek fazı esnasındadır. Ortalama yukarı-aşağı hareket 5 cm kadardır. Yana doğru hareket her tek basma fazında basan tarafa doğru 2,5 cm olacak şekilde toplam 5 cm’dir.

25
Sağlıklı insanlarda ayak tabanındaki yük dağılımları dengelidir
Sağlıklı insanlarda ayak tabanındaki yük dağılımları dengelidir. Bu dengenin bozulması ile vücudun biyomekanik duruş dengesi de bozulur . Topuk dikeni, Ayak Nasırları, Ayak ve Ayak bileği ağrıları, Bacak, diz, kalça,ve bel ağrıları ) Bilgisayar destekli çalışan "Yürüme Platformu" ayak basınçlarını en ince ayrıntılarına kadar ölçmekte ve ayağınızın basınç haritasını çıkarmaktadır.
 Bilgisayar destekli çalışan Yürüme Platformu ayak basınçlarını en ince ayrıntılarına kadar ölçmekte ve ayağınızın basınç haritasını çıkarmaktadır.")
26
Yürüme Analizi Ayak Haritasının Çıkarılması

29
Hastalık şiddetinin belirlenmesinde, uygulanacak tedavi yöntemine karar vermede ve tedavi sonuçlarının değerlendirilmesinde yürüme analizi sistemlerinin önemli yeri vardır. Hastalığın ileride neden olabileceği fonksiyonel kayıplara karşı önlemler alınmalı, aktivite ve katılım düzeyindeki kısıtlanmalar izlenmelidir. Tedaviyi yönlendirmede ve tedavi etkinliğini izlemede yaygın olarak kullanılmaktadır.

30
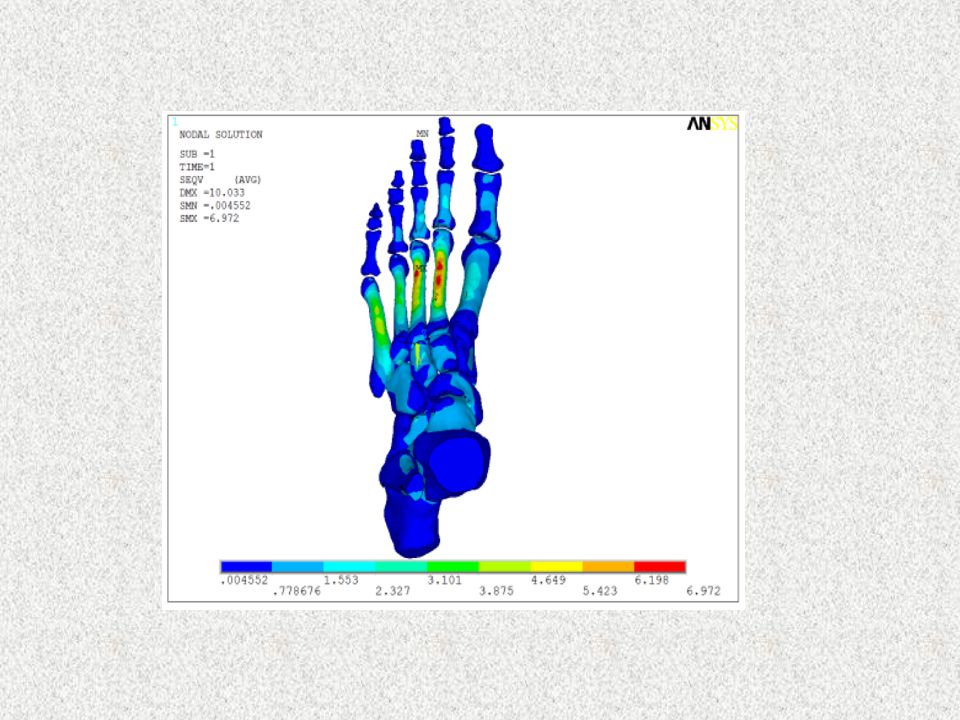
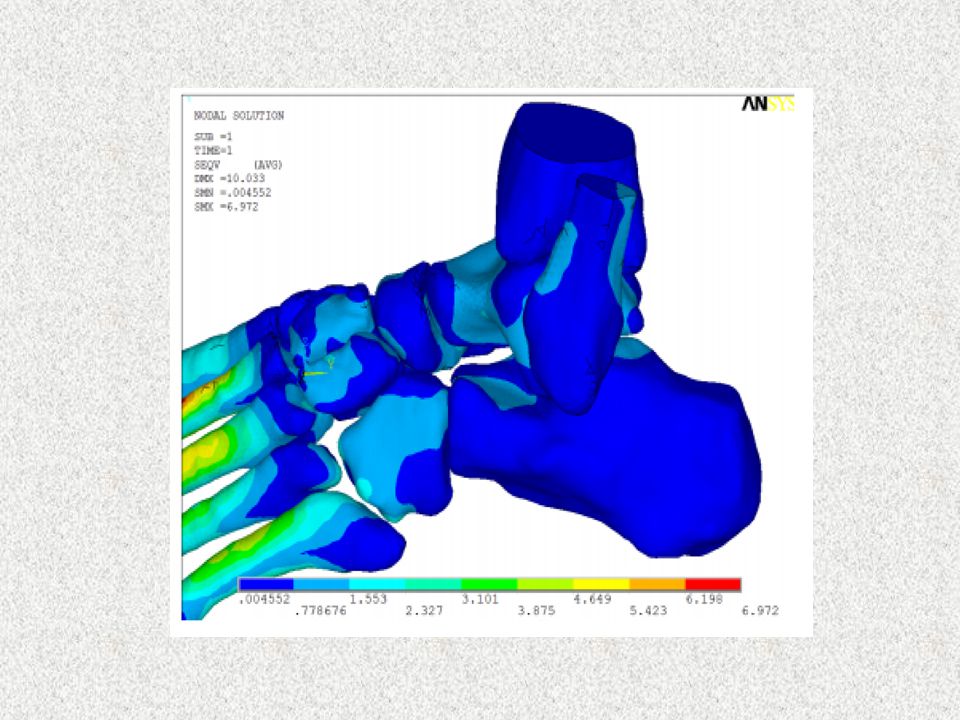
Ayakta Sonlu Elemanlar Metodunun Kullanılması
Sırt üstü yatar pozisyonda deneğin ayağının 64 adet kesit görüntüsü çekilmiştir . Her bir görüntü arasındaki mesafe 2 mm olmakla beraber görüntüler ayak bileğini de kapsamaktadır.

31
Ayak görüldüğü gibi kemik , kıkırdak ve yumuşak dokudan oluşmaktadır
Ayak görüldüğü gibi kemik , kıkırdak ve yumuşak dokudan oluşmaktadır. -İlk resim yumuşak doku sonlu elemanlar modeli -İkinci resim Kemik ve kıkırdak doku sonlu elemanlar modeli

32
Homojen,lineer,izotropik elastik malzeme özellikleri
Nonlineer malzeme , hiperelastik malzeme özellikleri

35
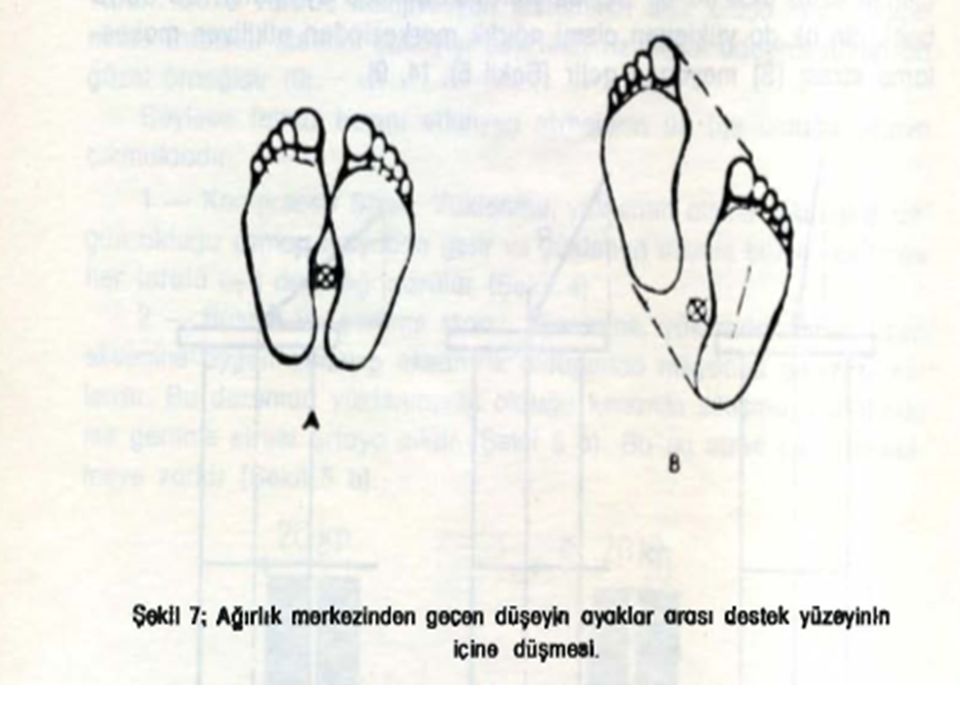
İnsan yürüyüşünün ister statik ister dinamik olarak incelenmesi esnasında bazı klasik fizik kurallarının unutulmaması gereğidir. Örneğin ayakta duran bir şahsın ağırlık merkezinden geçen bir düşey o şahsın iki ayağının dış kenarı ile sınırlanmış bulunan destek yüzeyinin içine düşer.

37
Çift koltuk değneğiyle yürüyen bir şahısta ağırlık merkezinden geçen düşeyi daima destek yüzeyinin içine düşürmek zorunluluğu kendini gösterir.

38
Aynı durum ağırlık taşıyan bir şahısta otomatik olarak bir postür değişimi ile kendini gösterir.
Postür, vücuttaki organların sistematik olarak dizilişinin ortaya çıkardığı görüntünün tıp dilindeki adıdır

45
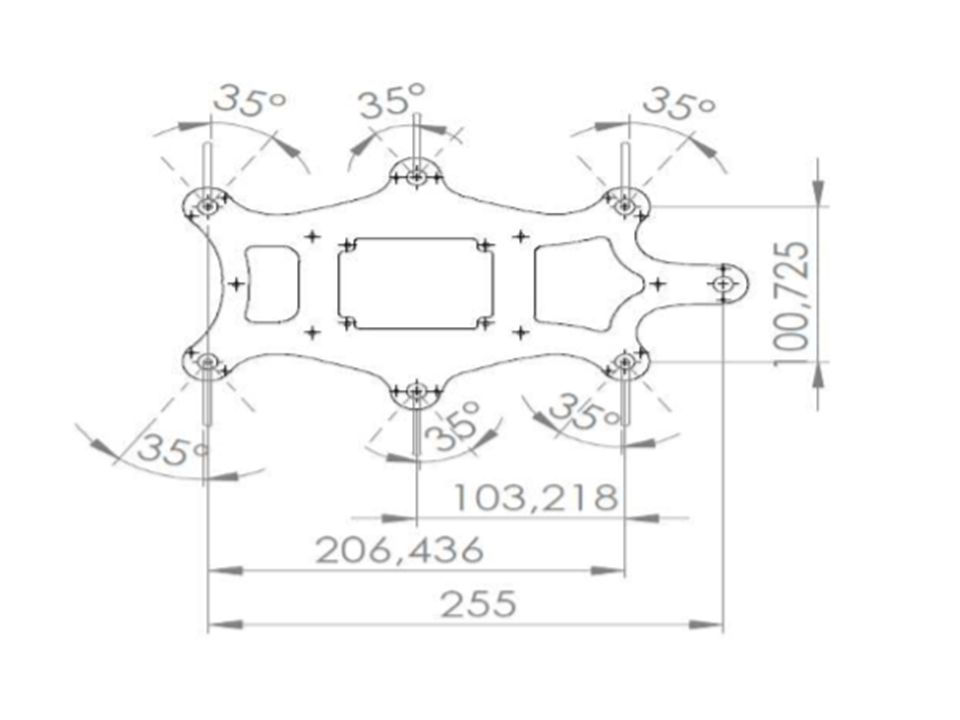
Dış İskelet Sisteminin Solidworks İle Tasarlanması
Alt ekstremite problemleri için dış iskelet sistemi tasarlanırken, sistemin ayakta durabilmesi ve hareket esnasında insan ağırlığının eklem motorlarına doğrudan etkimemesi temel prensip olarak belirlenmiştir. Destek sisteminin bacağa uyumu ve hareket esnasında dış iskelet sistemi ve bacağın tek bir uzuv gibi hareket etmesi için poliüretan malzemeden destekler kullanılacaktır . Piyasadaki bir çok ortez-protez yapım ve uygulama merkezinin imal edebildiği bu destekler, hazır mekanik kilitler ile desteklenecek ve motorların yapabileceği ters hareketler sonucunda bacağın zarar görmesi engellenecektir. Dış iskelet sisteminin her ekleminde, sürtünme sonucu oluşacak kayıpları en aza indirgemek ve yataklamayı sağlamak amacı ile sabit bilyalı radyal rulmanlar kullanılmıştır.

46
Destek sisteminin bacağa uyumu ve hareket esnasında dış iskelet sistemi ve bacağın tek bir uzuv gibi hareket etmesi için poliüretan malzemeden destekler kullanılacaktır.

47
Yürüme Verilerinin Elde Edilmesi
Dış iskelet sisteminin tasarım sürecinde, eklem motorlarına hareket verisi sağlamak ve sistemin statik ve dinamik analizlerini gerçekleştirmek amacıyla, sağlıklı insanlar üzerinden sajital düzlemde yürüme verileri alınmış ve basma sırasında ayak tabanına gelen kuvvetler ölçülmüştür. Diz, kalça ve bilek açıları ile ayak tabanının dört farklı bölgesine zeminden gelen tepki kuvvetleri ölçülmüştür. Bu veriler içerisinden en çok tekrarlananlar dikkate alınmış ve analizler bu değerler ile gerçekleştirilmiştir.

48
Sistemin taşıyıcı kısımlarının, hafiflik ve maliyet göz önünde bulundurularak Al 6000 serisi alüminyum alaşımından imal edilmesi kararlaştırılmıştır. Sistemin, farklı boydaki insanlar tarafından da kullanılabilmesi için baldır ve uyluk kısımları toplamda 10 cm'ye kadar uzayabilecek şekilde tasarlanmıştır.

49
Şekil ,bir yürüme çevrimindeki sekiz ayrı fazı ve çevrim içerisindeki oluşum zamanlarını yüzde olarak göstermektedir.

50
Bir yürüme çevrimine ait açısal konumlar.

51
Bir yürüme çevrimi boyunca ayak tabanının dört farklı bölgesine zeminden etkiyen tepki kuvvetlerinin zamana göre değişimi ;

52
Dört bölgeden ölçülen kuvvetlerin toplam değeri

53
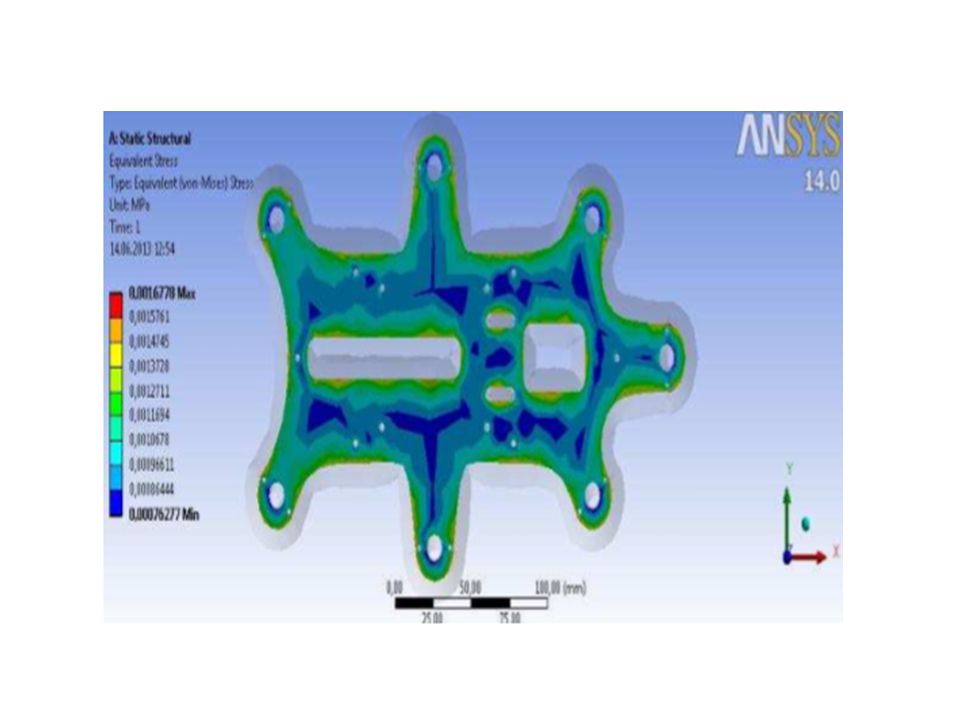
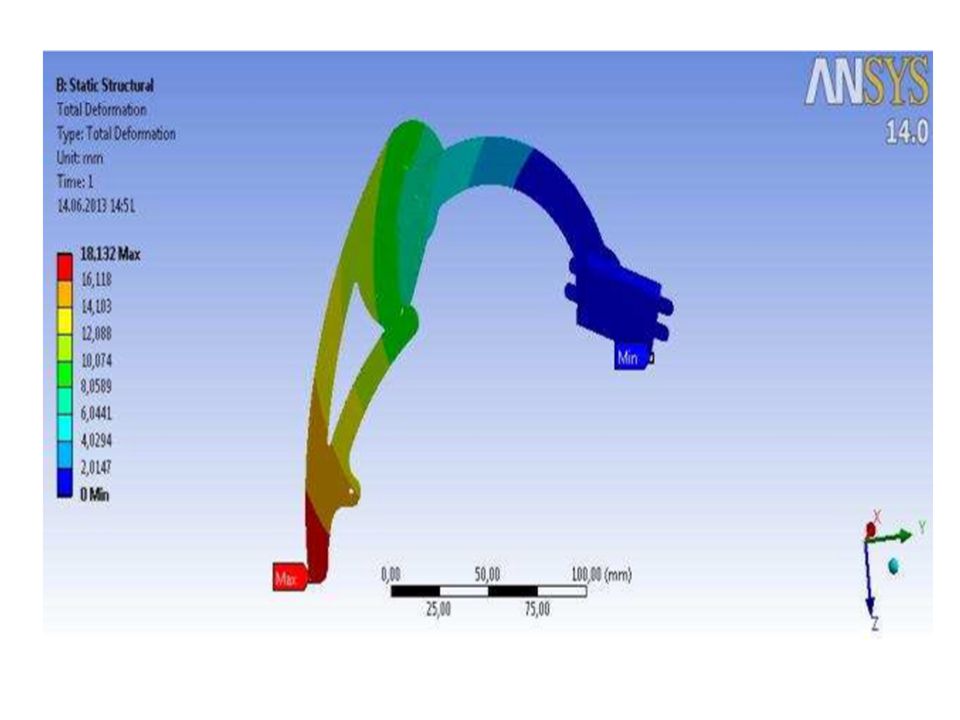
Dış İskelet Sisteminin Statik Analizi
Elde edilen yürüme verileri ve yere basma esnasında ayağa zeminden gelen tepki kuvvetleri girdi olarak kullanılarak dış iskelet sisteminin sonlu elemanlar yöntemi ile statik gerilme analizleri gerçekleştirilmiştir. Analiz sonucunda elde edilen gerilme değerlerine göre taşıyıcı sistem elemanlarının mukavemet kontrolleri gerçekleştirilmiştir.

54
Dış iskelet sisteminin 65 kilogramlık bir insana uygulanacağı düşünülerek, sonlu elemanlar analizi gerçekleştirilen üç farklı durum için, yürüme sırasında ayak tabanının dört farklı bölgesine etki eden tepki kuvvetleri ve eklem açıları elde edilmiştir. Sistemin sabitlendiği bölgenin bel bölgesi olduğu kabul edilmiştir.

55
Dış iskelet sisteminin sonlu elemanlar modeli ve sınır koşulları görülmektedir. Mesh boyutu 6 mm olarak alınmıştır

56
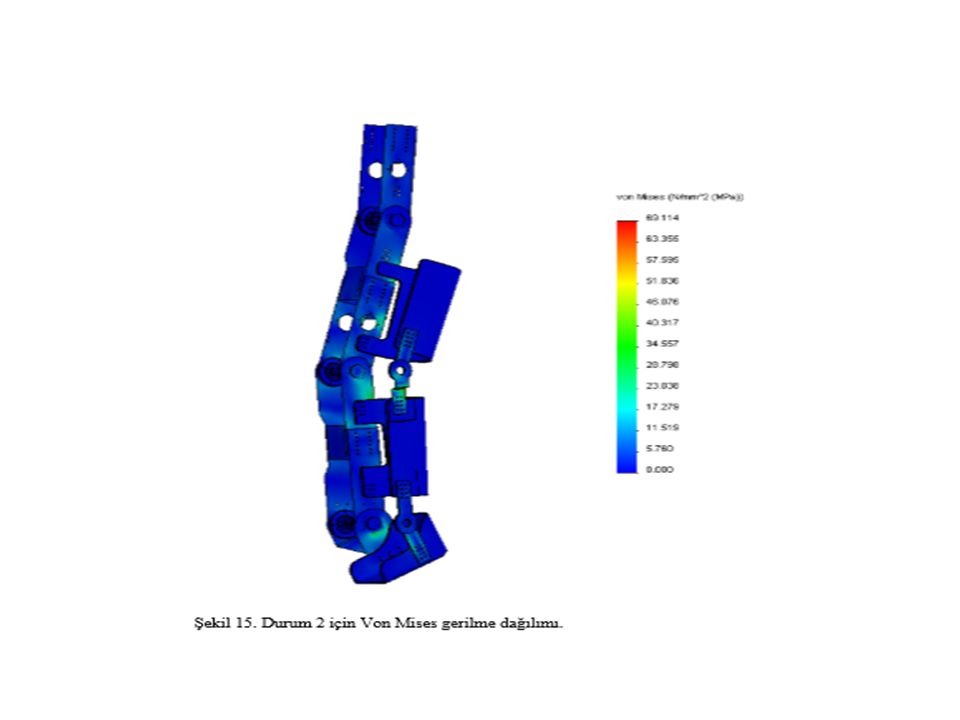
Tabloda belirtilen üç kritik durum için destek sisteminde oluşan Von Mises gerilme dağılımı verilmiştir.

59
Dış İskelet Sisteminin Kinetik Analizleri Dış iskelet sisteminin kalça, diz ve bilek mafsallarında toplam üç adet servo motor kullanılmıştır. Elektriksel uyartım ve kontrol işlemleri sırasında mafsal motorlarının karşılaması gereken moment ve güç gereksinimlerini belirlemek amacı ile dış iskelet sistemine ait katı model üzerinde kinematik ve kinetik analizler yapılmıştır. Sağlıklı insandan alınan yürüme verileri kullanılarak SolidWorks Motion yazılımı ile elde edilen yürüme çevrimi görüntüsü ;

60
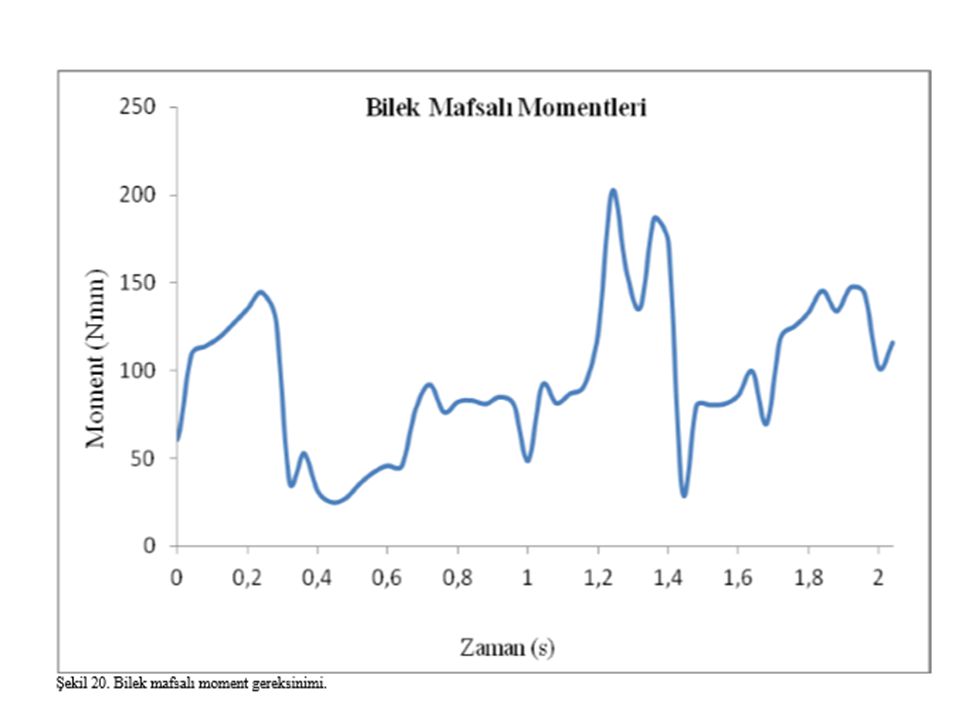
Gerçekleştirilen analizler sonucunda elde edilen kalça, diz ve bilek mafsal momentleri ;