Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

2
BÖLÜM 14 TAŞIT KULLANIM KARAKTERİSTİKLERİ VE DİREKSİYON SİSTEMİ

3
14.1 YÖNLENDİRME (DİREKSİYON) GİRİŞLERİ VE TAŞITIN CEVABI
Kullanım karakteristikleri, taşıtın yönlendirme (direksiyon) girişleri, hareket doğrultusunu etkileyen rüzgâr ve yolun bozucu etkilerine cevabı ile ilgilidir. Taşıtın kullanımında karşılaşılan iki önemli problemden biri taşıtın arzu edilen yola yönlendirilmesi, diğeri ise dış bozucu etkenlere karşı doğrultu kararlılığının sağlanmasıdır.
 girişleri, hareket doğrultusunu etkileyen rüzgâr ve yolun bozucu etkilerine cevabı ile ilgilidir. Taşıtın kullanımında karşılaşılan iki önemli problemden biri taşıtın arzu edilen yola yönlendirilmesi, diğeri ise dış bozucu etkenlere karşı doğrultu kararlılığının. sağlanmasıdır.")
4
14.1 YÖNLENDİRME (DİREKSİYON) GİRİŞLERİ VE TAŞITIN CEVABI
Kararlılık, taşıtın verilen konumu koruma yeteneğidir. Kararlı bir taşıt, bozucu kuvvetin etkisinde kaldıktan sonra, bu kuvvet kalktığında tekrar eski konumuna gelebilen taşıttır. Kararsız taşıt ise, bozucu kuvveti şiddetlendirerek dengesini kaybeden taşıttır.

5
14.1 YÖNLENDİRME (DİREKSİYON) GİRİŞLERİ VE TAŞITIN CEVABI
İyi taşıt davranışı için, kararlılık ve viraj yeteneğine ek olarak gerekli iki özellik daha bulunmaktadır. Bunlar; "cevap" ve "geri besleme" özellikleridir. Kararlılık ve kararsızlık

6
14.2 DİREKSİYON SİSTEMLERİ
Direksiyon sistemi, taşıtın yönlendirme tekerleklerini döndürmeye yardım eden sistemdir. Dönemeçlerde taşıtın bütün tekerleklerinin aynı anlık dönme merkezine sahip olması lazımdır.

7
14.2 DİREKSİYON SİSTEMLERİ
Zeminle temas halindeki tekerlek

8
14.3 SİSTEMİN ELEMANLARI Sürücünün direksiyon hareketlerinin tekerleklere iletilmesi için bazı elemanlara ihtiyaç vardır. Bu elemanlar araç tiplerine bağlı olarak farklılıklar göstermektedir. Şekilde görülen tipik bir direksiyon sisteminin temel elemanları şunlardır:

9
14.3 SİSTEMİN ELEMANLARI Direksiyon simidi Direksiyon mili
Direksiyon dişli kutusu Direksiyon bağlantı kolları

10
14.3 SİSTEMİN ELEMANLARI Tipik bir direksiyon sistemi

11
14.4 DİREKSİYON KUTUSU Direksiyon kutusu, direksiyon mili ile direksiyon kolu arasında bulunan ve direksiyon simidinin dönme hareketini küçülterek kumanda levyesi ve direksiyon mekanizması aracılığıyla tekerleklere aktaran organdır.

12
Kremayer ve Pinyon Kremayer ve pinyonlu sistemde, uzun rotun orta kısmı mafsallıdır. Bu parça üzerinde bir kremayer bulunmakta ve direksiyon mili üzerine veya buna bir konik dişli sistemi ile bağlı bir mil üzerinde bulunan bir pinyon dişli ile müşterek çalışmaktadır.

13
Kremayer ve Pinyon Kremayer ve pinyonlu direksiyon kutusu

14
Sonsuz Vida ve Makara Şekilde görülen sonsuz vida ve makarada küçültme, sonsuz vida ve karşılık dişlili hız kutularındaki gibidir. Teğet bulunan dişli tam veya sektör halinde olabilir. Sonsuz vida ve sektör dişlili direksiyon kutusu

15
14.4.3 Sonsuz Vida ve Bilyeli Somun
Direksiyon milinin ucunda bir veya bir kaç ağızlı sonsuz vida bulunmakta ve bunun üzerinde bir somun hareket etmektedir. Sonsuz vida ile somunun arasında üretilen kuvvetler, düşük sürtünmeli, devridaim yapan bir bilye dizisi aracılığıyla sağlanmaktadır.

16
14.4.3 Sonsuz Vida ve Bilyeli Somun
Sonsuz vida ve somunlu direksiyon kutusu

17
14.5 ÖN DÜZEN GEOMETRİSİ Direksiyon sistemi aracılığıyla taşıtı yönlendirme görevini de üstlenen ön tekerleklerin bazı konumlandırma özellikleri bulunmaktadır. Bu özellikler “ön düzen geometrisi” ile açıklanmaktadır.

18
14.5 ÖN DÜZEN GEOMETRİSİ Camber (yatma açısı): Camber açısı (), tekerleğin dönme eksenine dik düzlem ile tekerleğin yere temas noktasına dik düzlem arasındaki açıdır. Pozitif camber açılı bir taşıtın ön tarafından bakıldığında tekerleklerin üst kısmı, alt kısmından daha açık görünür
: Camber açısı (), tekerleğin dönme eksenine dik düzlem ile tekerleğin yere temas noktasına dik düzlem arasındaki açıdır. Pozitif camber açılı bir taşıtın ön tarafından bakıldığında tekerleklerin üst kısmı, alt kısmından daha açık görünür.")
19
14.5 ÖN DÜZEN GEOMETRİSİ Ön aks pimi açısı (pim yatma açısı, king-pin açısı): Ön aks pimi açısı (α), ön aks pimi ekseni ile tekerleğin yere temas noktasına dik düzlem arasındaki açıdır. Toe-in (kapanıklık) - Tekerleklerin yatay izdüşümleri paralel olacak yerde bir miktar öne doğru kapanıktır
: Ön aks pimi açısı (α), ön aks pimi ekseni ile tekerleğin yere temas noktasına dik düzlem arasındaki açıdır. Toe-in (kapanıklık) - Tekerleklerin yatay izdüşümleri paralel olacak yerde bir miktar öne doğru kapanıktır.")
20
14.5 ÖN DÜZEN GEOMETRİSİ Toplam açı: Camber ve ön aks pimi açısının toplamıdır. Bu açı, açı merkezinin bulunduğu yer bakımından önemlidir. Caster: Caster açısı , tekerleğin yönlendirme ekseni ile tekerleğin yere temas noktasına dik düzlem arasındaki açıdır

21
kayma açıları, istenmeyen yanal kayma açısına neden olur.
14.6 DÖRT TEKERLEKTEN YÖNLENDİRME Bilinen klasik sisteme sahip süspansiyonlu bir aracın arka aksının yanal kuvvetlerin etkisi altında yönlendirme hakimiyeti azdır. Arka akstaki geniş kayma açıları, istenmeyen yanal kayma açısına neden olur.

22
14.6 DÖRT TEKERLEKTEN YÖNLENDİRME
Quadrasteer Sistemi QUADRASTEER™ dört tekerlekten yönlendirme sistemi kamyon, minibüs ve spor araçlarda düşük hız manevra yeteneğini ve yüksek hız kararlılığını ve iz takip yeteneğini geliştirmektedir.

23
Quadrasteer sistemi

24
14.7 KARARLI KULLANIM KARAKTERİSTİKLERİ
Kararlı kullanım performansı, taşıtın zamana göre değişmeyen koşullardaki dönüşü sırasındaki doğrultu davranışı ile ilgilidir. Kararlı dönüşe örnek olarak, bir taşıtın sabit yarıçaplı bir virajdaki sabit hızlı hareketi verilebilir.

25
14.7 KARARLI KULLANIM KARAKTERİSTİKLERİ
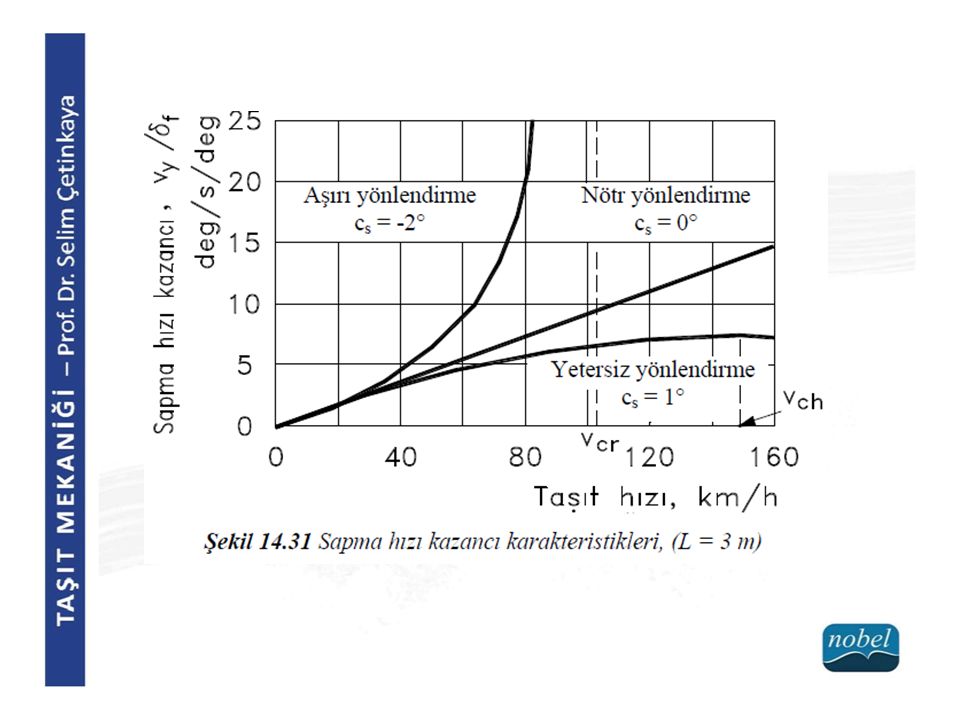
Nötr Yönlendirme Yönlendirme katsayısı cs= 0, yani ön ve arka tekerleklerin kayma açıları eşit olduğunda, belirli bir virajı almak için gerekli yönlendirme açısı ve yönlendirme özelliğine sahip taşıta "nötr yönlendirmeli taşıt" denir

26
14.7 KARARLI KULLANIM KARAKTERİSTİKLERİ

27
14.7 KARARLI KULLANIM KARAKTERİSTİKLERİ
Yetersiz Yönlendirme Yönlendirme katsayısı Cs > 0 olduğunda, taşıtın ön tekerleklerinin kayma açısı α f, arka tekerleklerin kayma açısı α r den büyüktür. Böyle bir taşıtla sabit yarıçaplı bir virajı almak için gerekli yönlendirme açısı α f, hızın karesiyle orantılı olarak artmaktadır. Bu kullanım özelliğine sahip taşıtlara "yetersiz yönlendirmeli taşıt" denir.

28
14.7 KARARLI KULLANIM KARAKTERİSTİKLERİ
Aşırı Yönlendirme Yönlendirme karakteristiği cs< 0 ise, ön tekerleklerin kayma açısı α f arka tekerleklerin kayma açısı α r den daha küçüktür. Böyle bir taşıtla, sabit yarıçaplı bir virajı geçmek için gerekli yönlendirme açısı, hız arttıkça azalmaktadır. Bu tür kullanım özelliğine sahip taşıtlara "aşırı yönlendirmeli taşıt" denir,

29
14.8 VİRAJ TUTUMU 14.8.1 Virajda Yana Kayma
Dönüş halindeki bir taşıta, yol yüzeyinde olmak üzere; gövde kuvvetleri, santrifüj kuvvet ve lastik kuvvetleri etki etmektedir.

30
14.8 VİRAJ TUTUMU Dönüş yapmakta olan bir taşıta etkiyen kuvvetler

31
14.8 VİRAJ TUTUMU 14.8.2 Virajda Yana Devrilme
Bazı durumlarda, taşıta etkiyen santrifüj kuvvet oldukça yüksek değerlere ulaşabilir. Bu durumda, yanal lastik kuvvetleri taşıtın yanal kaymasını başlatamaz ve taşıt viraj dışına doğru devrilir.

32
14.8 VİRAJ TUTUMU 14.8.3 Devrilme Ekseni
Taşıtın virajdaki hareketi sırasında ağırlık merkezine etkiyen santrifüj kuvvet, taşıtın hareket yönüne dik bir devrilme etkisi üretir. Bu etkinin değeri, değişen sıçramaların etkisindeki yaylanma oranına ve santrifüj kuvvetin kuvvet koluna bağımlıdır. Kuvvet kolu, ağırlık merkezi ile devrilme ekseni arasındaki mesafedir.

33
14.8 VİRAJ TUTUMU Şekilde, yol yüzeyinin yanal eğimi 0° olan bir virajda seyretmekte olan bir taşıta etkiyen kuvvetler ve devrilme açısı açıklanmaktadır.

34
TAHRİK KUVVETİNİN VİRAJ YETENEĞİNE ETKİSİ
Arkadan Tahrikli Taşıt Dönüş sırasında taşıtı ivmelendirmek veya sabit hızı korumak üzere tahrik kuvveti uygulanabilir. Kayma açısı α ile hareket etmekte olan bir tekerlek tarafından tekerlek düzlemine dik olarak üretilen kuvvet, yanal kuvvet (Fs) tir.
 tir.")
35
TAHRİK KUVVETİNİN VİRAJ YETENEĞİNE ETKİSİ 14.9.2 Önden Tahrikli Taşıt
Önden tahrikli taşıtlar her iki tekerleğe etki eden bileşke yanal kuvvetlerin daha düzenli olmaları sonucu, dönüş sırasında daha büyük santrifüj kuvveti dengeleyebilirler. Bu taşıtların keskin virajları daha hızlı alabilmelerinin bir başka nedeni de, arkadan tahrikli taşıtın tahrik kuvveti taşıtı virajın dışına doğru iterken, önden tahriklinin tahrik kuvvetinin dönüş yönünde olması nedeniyle, ön dönüş kuvvetini artırmasıdır.

36
14.10 YÖNLENDİRME GİRİŞLERİNE KARARLI CEVAP
Taşıt, farklı girişler uygulanan bir kontrol sistemi olarak değerlendirilebilir. Bir dönüş işlemi gerçekleştirilirken, sürücünün uyguladığı direksiyon çevirme, giriş; buna karşı taşıtın hareket değişkenleri olan sapma hızı, yanal ivme ve dönme yarıçapı da çıkış değerleri olarak kabul edilirler.

37
Sapma Hızı Cevabı Sapma hızı, taşıtın ileriye doğru hızının dönme yarıçapına oranıdır. Sapma hızı kazancı ise, taşıtların yönlendirme cevabının karşılaştırılmasında kullanılan bir parametredir ve kararlı sapma hızının yönlendirme açısına oranı şeklinde tanımlanır.

39
Yanal İvme Cevabı Yanal ivme kazancı, kararlı yanal ivmenin yönlendirme açısına oranı olarak tanımlanmaktadır.

40
Yanal İvme Cevabı Yanal ivme kazancı, kararlı yanal ivmenin yönlendirme açısına oranı olarak tanımlanmaktadır.

41
Dönüş Cevabı Dönüş cevabı, kararlı dönüşün, ön tekerlek yönlendirme açısına oranı olarak tanımlanmaktadır.

42
ÖRNEK PROBLEM 14.3 Ağırlığı 10 kN, dingilleri arası 2,6 m olan bir taşıtın statik ağırlık dağılımı; % 55 ön, % 45 arka tekerlekler şeklindedir. Ön tekerleklerin dönüş katılığı 39 kN/rad, arka tekerleklerinki ise 38,3 kN/rad olarak belirlenmiştir. Direksiyon dişli oranı 24:1 olduğuna göre; sapma hızı kazancı ve yanal ivme kazancını, direksiyon açısı cinsinden belirleyiniz.

Benzer bir sunumlar











.>")







