Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
Sensor Networklerde Hareket İzleme (Tracking)
Arş. Gör. Ayşegül Alaybeyoğlu
![]()
2
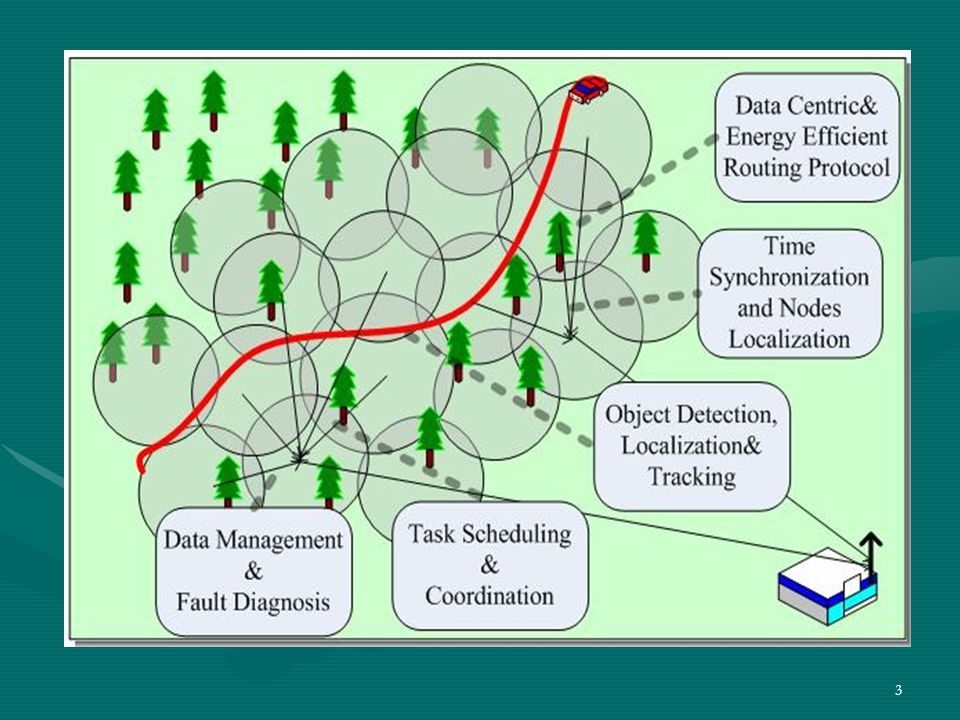
1. Giriş Sensor networkleri; ortamdaki sıcaklık, nem, basınç ve hareketlilik gibi durumlardaki değişiklikleri takip edebilen sismik, termik, manyetik ve görsel gibi bir çok farklı tipte sensör içerebilir. Bu da sensor networklerinin bir çok farklı uygulama alanında kullanılabilmesini sağlar Bu uygulamaların başında da tracking uygulamaları gelmektedir. Özellikle de askeri uygulamalarda çok sık kullanılmaktadır.

4
Bildiri 1 DCTC: Dynamic Convoy Tree-Based Collaboration for Target Tracking in Sensor Networks IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 3, NO. 5, SEPTEMBER 2004
![]()
5
Dynamic Convoy Tree-Based Collaboration
Tree expansion and pruning Conservative Scheme Prediction Based Scheme Tree reconfiguration Sequential Reconfiguration Localized Reconfiguration

6
Dynamic Convoy Tree-Based Collaboration

7
System Model Sensor network, G(V,E) graf yapısı şeklinde modellenebilir. Her bir düğüm kendi lokasyon bilgisini GPS veya triangulation gibi teknikler kullanarak elde edebilir. Ağdaki her bir düğüm ya aktif ya da sleep modda olabilir. Aktif Mod Sleep Mod GAF protokolü Transmission power Communication range

8
System Model

9
DCTC’nin Temel Yapısı

10
Çalışmada Geçen Kavramlar
Hedefin alana girdiği an: Hedefin alanda bulunduğu herhangi bir an: Hedefin alandan çıktığı an: Hedefi tespit edecek yani merkezden kadar uzaklıktaki düğümler kümesi: T anında hedefin bulunduğu konumun merkez kabul eldildiği yarıçaplı çember alanı: monitoring region T anında oluşturulan convoy tree:

11
Ağaç oluşturmada iki önemli nokta:
Tree coverage : Ağaçtaki düğüm sayısının hedefi algılayabilen düğümlerin sayısına oranı Eğer hedefi algılayan bütün düğümler ağaçta ise tree coverage 100% Ağaçta ne kadar fazla düğüm varsa o kadar doğru bilgi fakat enerji tüketimi erkin olmaz. Energy consumption: Verinin toplanması esnasında harcanan enerji İ düğümün algıladığı verinin büyüklüğü r birim olsun. Verinin bir biriminin i düğümünden kök düğüme iletilmesi için harcanan enerji e(i,R) olsun. Veri iletimi için harcanan toplam enerji:
 olsun. Veri iletimi için harcanan toplam enerji:")
12
Ağaç oluşturmada iki önemli nokta
Hedef hareket ettikçe ağaç sürekli güncellenir ve bir convoy tree sequence oluşur. Average tree coverage: Total energy consumption:

13
Optimal DCTC Scheme network topolojisi, nesnenin gideceği yön biliniyor. Tree coverage: 100% Optimal DCTC Scheme:

14
Tree Expansion/Pruning and Reconfiguration in o_DCTC

15
Tree Expansion/Pruning and Reconfiguration in o_DCTC

16
Tree Expansion/Pruning and Reconfiguration in o_DCTC
Tree Pruning Eski düğümler belirlenir: Bu düğümlere mesajı gönderilir. Bu mesajı alan düğüm ağaçtan ayrılır.

17
Tree Expansion/Pruning and Reconfiguration in o_DCTC
Tree Reconfiguration

18
Design and Implementation of DCTC
Bütün düğümlerin network topolojisini bilmesi Nesnenin hareketinin biliniyor olması Tree Coverage’ın 100% olması optimum bir durumdur ve gerçek uygulamalarda bu mümkün değildir. DCTC’nin uygulanabilirliği için yaklaşımlar önerilmiştir.

19
Constructing the Initial Tree
Nesne, alana girdiğinde, hedefi algılayan düğümler öncelikle kendilerine root düğüm seçerek initial ağacı oluştururlar. Nesneye en yakın düğüm root olarak belirlenir. Kök belirleme algoritması iki aşamadan oluşur: Birinci Aşama Her bir i düğümü komşu düğümlerine kendi id ve nesneye olan uzaklık bilgisini mesajı ile broadcast eder. Eğer i düğümü ‘den küçük bir mesajı elde etmezse kendisi root adayı olur aksi halde en küçük sahip komşusunu parent olarak belirler.

20
Constructing the Initial Tree
Root Belirleme- Devam Bütün düğümler birbirlerine tek hop’luk mesafede olmayacağı için ilk aşama sonucunda birden çok rook adayı çıkacaktır. İkinci Aşama Herbir i root adayı, hedefi algılayan diğer düğümlere mesajını iletir. Eğer root adayı den daha küçük bir mesajı elde ederse adaylığı bırakır ve j düğümüne winner mesajının geldiği yolun tersi yönde bir yol oluşturur. Enküçük ye sahip düğüm root olur.

21
Tree Expansion and Pruning

22
Tree Reconfiguration Nesne hareket ettikçe, nesneyi algılayan düğümler de değişecektir. Bu düğümler köke uzak kalırsa düğümlerden köke veri iletimi için harcanan enerji artacaktır. Bu durumda nesneye yakın bir kök seçilecek ve ağaç yeniden yapılandırılacaktır. Ağacın yeniden yapılandırılmasında da çok enerji harcanır. Bu yüzden kök ile nesne arasındaki mesafe belirli bir threshold değerini aşmadığı sürece ağaç yeniden yapılandırılmaz. Threshold: Kökdüğüm seçildikten sonra ağacın yeniden yapılandırılması gerekir. İki yaklaşım önerilmiştir: Sequential ve Localized Reconfiguration

23
Tree Reconfiguration Sequential Reconfiguration

24
Sequential Tree Reconfiguration Algorithm

25
Localized Reconfiguration
Bu yaklaşım ile iki optimizasyon önerilmiştir: Reconf mesajından maliyet bilgisini kaldırma. İki düğüm arasındaki mesafe bilindiği sürece maliyetin de hesaplanabileceği düşünülmüş. Reconf mesajından düğümlerin lokasyon bilgisini kaldırma. Diğer düğümlerin lokasyon bilgisinin lokal olarak tutulması önerilmiştir.

26
Sonuç Tree expansion ve pruning için prediction based yaklaşım conservative yaklaşıma göre daha iyi sonuç vermiştir. Yüksek bir tree coverage’a ve az maliyete sahiptir. Aynı tree expansion ve pruning yöntemi kullanıldığında, tree reconfiguration için düğüm yoğunluğu fazla ise localized az ise sequential yaklaşım iyi sonuç verir.

27
Efficient Location Tracking Using Sensor Networks
Bildiri 2 Efficient Location Tracking Using Sensor Networks Proceedings of 2003 IEEE Wireless Communications and Networking Conference (WCNC)
![]()
28
Publish and Subscribe Tracking Method Scalable Tracking Using Networked Sensors (STUN)
Drain and Balance Method
![]()
29
STUN Yapısı

30
STUN Yapısı Communication Cost ve Delay

31
Drain and Balance DAB ağacının kaç adımlık olacağı ve threshold değerleri belirlenir. Draining İşlemi: Threshold değerinden yüksek düğümleri seçme ve birer intermediate node ile ayrı ağaçlar oluşturma Balancing İşlemi: Komşu ağaçların köklerini bir intermediate node ile birleştirme

32
Drain and Balance

33
Bildiri 3 Energy Efficient Strategies For Object Tracking in Sensor Networks: a data minig approach The Journal of Systems and Software 80 (2007) 1678–1698
![]()
34
Sistem Mimarisi

35
Hareket loglarının entegre edilmiş tablosu

36
Dinlediğiniz için Teşekkürler...

Benzer bir sunumlar



>")



 27.03.2008.>")






.>")
 Aşağıdaki şekillerden hangisi karedir? AB C D.>")



