Sunuyu indir
1
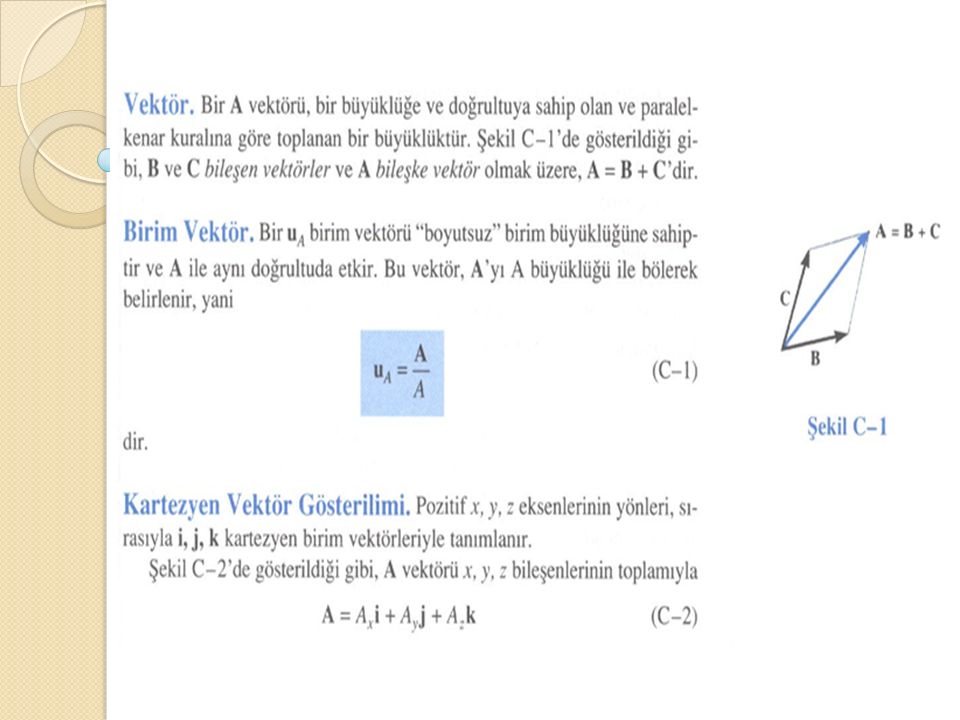
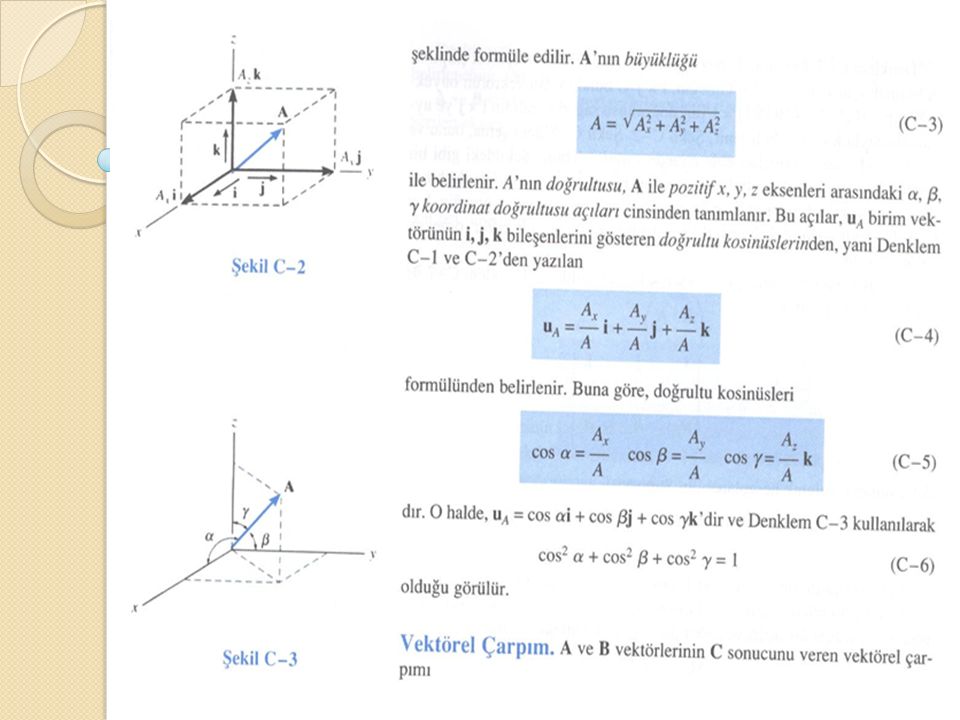
ANİ DÖNME MERKEZLERİ Mekanizmaların hız ve ivme analizinde çeşitli noktaların hız doğrultularına, dolayısıyla bunların ait oldukları düzlemlerin mutlak veya izafi dönme merkezlerine (ADM) ihtiyaç vardır. Katı cisim üzerindeki bir noktanın hız büyüklüğü, cisim üzerindeki noktayı ADM’ ye bağlayan doğrunun uzunluğu ile cismin açısal hızının çarpımına eşittir ve hız doğrultusu cisim noktasıyla ADM’ ni birleştiren doğruya diktir. 𝑉𝐴=𝐼𝑶A . 𝝎 veya 𝐕𝐀= 𝝎 x 𝐫𝐀 =𝝎k x 𝐫𝐀 𝑉𝐵=𝐼𝑂 B .𝝎 veya 𝐕𝐁=𝝎 x 𝐫𝐁 =𝝎k x𝐫𝐁 Herhangi bir düzlemsel harekette verilen bir anda hızı sıfır olan bir nokta vardır. B u noktaya söz konusu hareketin Ani Dönme Merkezi (ADM) denir. 𝐼 𝑂 - ADM
 ihtiyaç vardır. Katı cisim üzerindeki bir noktanın hız büyüklüğü, cisim üzerindeki noktayı ADM’ ye bağlayan doğrunun uzunluğu ile cismin açısal hızının çarpımına eşittir ve hız doğrultusu cisim noktasıyla ADM’ ni birleştiren doğruya diktir. 𝑉𝐴=𝐼𝑶A . 𝝎 veya 𝐕𝐀= 𝝎 x 𝐫𝐀 =𝝎k x 𝐫𝐀. 𝑉𝐵=𝐼𝑂 B .𝝎 veya 𝐕𝐁=𝝎 x 𝐫𝐁 =𝝎k x𝐫𝐁. Herhangi bir düzlemsel harekette verilen bir anda hızı sıfır olan bir nokta vardır. B u noktaya söz konusu hareketin Ani Dönme Merkezi (ADM) denir. 𝐼 𝑂 - ADM.")
2
Hız bakımından genel düzlemsel hareket, ADM etrafında ani dönme hareketiyle değiştirilebilir.
Birbirlerine göre bağıl hareket yapan iki katı cismin ADM: İki katı cismin öyle bir noktasıdır ki katı cisimlerden biri diğerine göre döner. İki katı cisim bu noktada bağıl hıza sahip değildirler. İki katı cismin ortak bir noktası olmasından ötürü cisimler bu noktada aynı büyüklük ve doğrultuda bir doğrusal hıza sahip olabilirler. Ani Dönme Merkezleri: 1. Bir nokta etrafında dönebilen uzuv : V A = I 21 A . 𝝎

3
2. Kayma hali : 3. Yuvarlanma hali : 𝑉 𝐴 = 𝐼 21 A.𝝎 𝑉 𝐵 = 𝐼 21 B.𝝎

4
4. Üzerindeki 2 noktanın hızı bilinen bir uzvun ADM
Hareket eden bir cismin ADM’ i her an değişebileceği gibi, aynı nokta da olabilir. Bu iki durum için dönme merkezleri, mutlak ADM ve bağıl (relatif) ADM olarak anılır. Mutlak ADM = Hareketli bir cismin sabit bir cisme göre verilen konumdaki ADM’ dir. Bağıl ADM = Hareketli bir cismin başka bir hareketli cisme göre verilen konumdaki DM’ dir.
 ADM olarak anılır. Mutlak ADM = Hareketli bir cismin sabit bir cisme göre verilen konumdaki ADM’ dir. Bağıl ADM = Hareketli bir cismin başka bir hareketli cisme göre verilen konumdaki DM’ dir.")
5
ADM’e pratik bir problem örneği: Araçlarda tekerlek-gövde bağlantı mekanizmasında aks ADM’leri ve araç boyuna dönme ekseni, taşıtın dinamiği üzerinde çok önemli bir tasarım parametresidir

6
Mekanizmaların ADM’ lerinin Bulunması
Mekanizmanın herhangi iki uzvu birbirlerine göre bağıl hareketli olacağından ortak bir ADM’ ne sahiptirler. Bir mekanizmanın uzuv sayısı n ise, toplam ADM : N= n(n-1) / 2 dir.
 / 2 dir.")
7
Bir örnekle inceleme yaparsak :( Tablosal Yöntem)
Dört kol mekanizmasının uzuv ve ADM’ lerini bir tabloda gösterirsek Uzuvlar ADM’ leri Görüldüğü gibi tabloda iki bölgedeki ADM’ leri aynı. Dolayısıyla N= 6 ADM var. [ N = n.(n-1)/2 =4.(4-1)/2 = 6 ] Bunlardan 4 tanesi (21, 32, 43, 41 ) döner mafsallar ve aynı zamanda ADM’leridir. Kalan 2 tanesinin ise (13 ve 24) bulunması gerekir. 1 2 3 4 - 12 13 14 21 23 24 31 32 34 41 42 43
/2 =4.(4-1)/2 = 6 ] Bunlardan 4 tanesi (21, 32, 43, 41 ) döner mafsallar ve aynı zamanda ADM’leridir. Kalan 2 tanesinin ise (13 ve 24) bulunması gerekir")
8
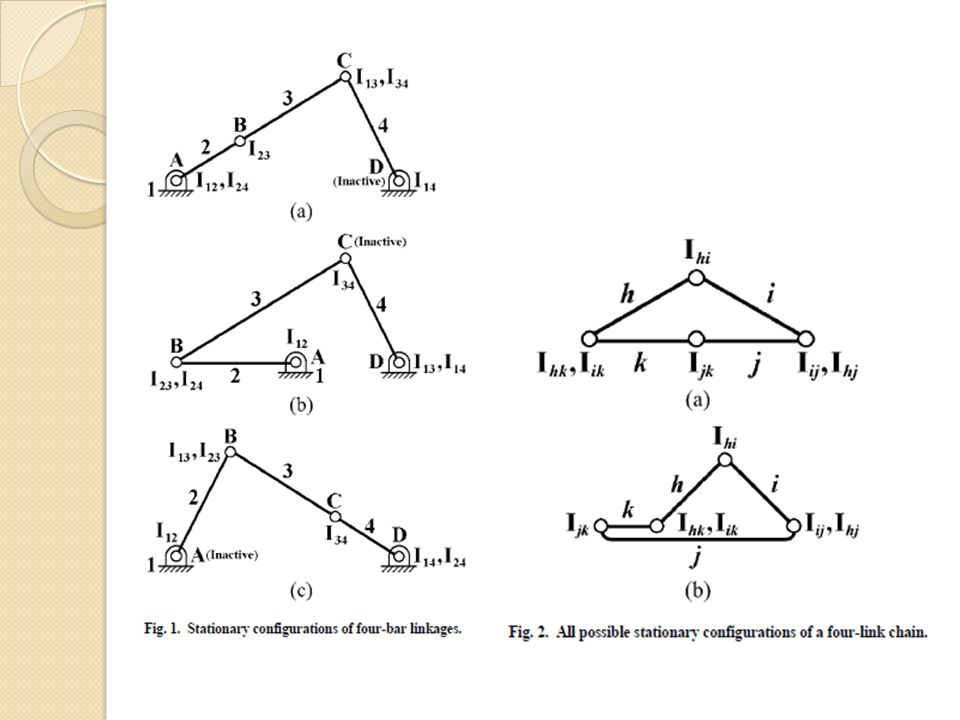
- 12 13 14 23 24 34 Aranhold - Kennedy Teoremi : Birbirine göre bağıl düzlemsel hareket yapan 3 tane cismin 3 tane ADM vardır, ve bunlar bir doğru üzerindedir.

9
Bu teoreme göre ; 13 ADM; ADM’ leri ve benzer şekilde ADM’ leri ile aynı doğru üzerindedir. Dolayısıyla 2 ve 4 düzlemlerinin kesişim noktası 13 ADM’ inin yerini belirler. 24 ADM’ i ise 3 ve 1düzlemlerinin kesişme noktasındadır. 3 ADM, Aranhold- Kennedy teoremine göre bir doğru üzerinde olacağından, ADM’ lerini veren doğru sayısı : L = n(n-1)(n-2) / 6= N(n-2) / 3 ifadesiyle bulunur. Yukarıdaki örnek için L=N(n-2)/3=6(4-2)/3=4 Bu 4 doğru ise ; ; ; ; doğrularıdır.
(n-2) / 6= N(n-2) / 3 ifadesiyle bulunur. Yukarıdaki örnek için L=N(n-2)/3=6(4-2)/3=4. Bu 4 doğru ise ; ; ; ; doğrularıdır.")
10
Bu teorem mekanizmaların ADM’ nin bulunmasında ve hız analizlerinde çok önemlidir.
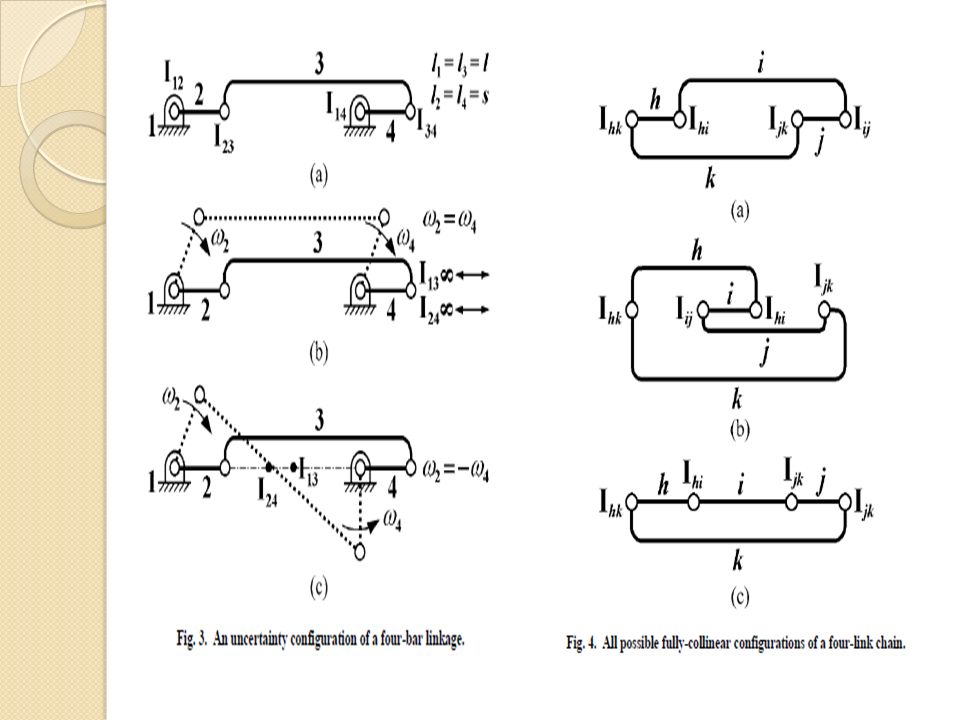
Mesela yandaki şekilde boyutlar ne olursa olsun ADM sonsuza düşer.

11
Keza sağdaki şekilde de
13 ADM sonsuzdadır. Sol şekilde ise 13 ve 24 sonsuzda- dır. 2 ve 4 nolu kollar, aynı açısal hızda ve aynı yönde dönerken , 3 nolu kol eğrisel bir öteleme yapar ( 𝜔 3 = 0).
.")
12
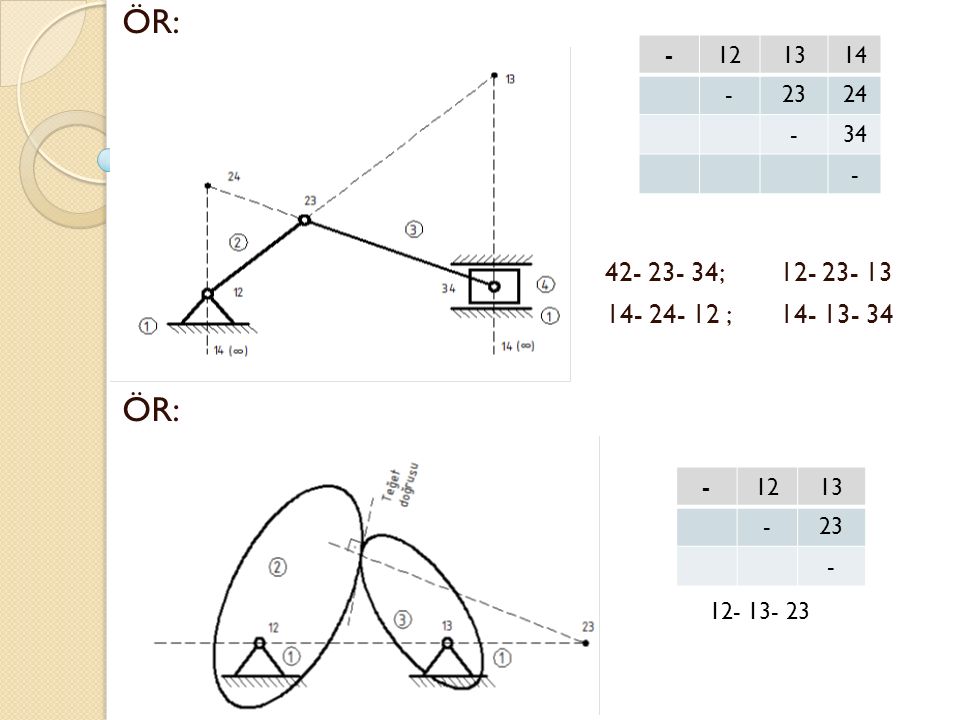
ÖR: ; ; - 12 13 14 23 24 34 - 12 13 23
13
. Farklı bir metot ise; 1 2 3 4 12 - 13 23 14 24 34 13 12 -23 14-43 24
12 -14 23 -34

14
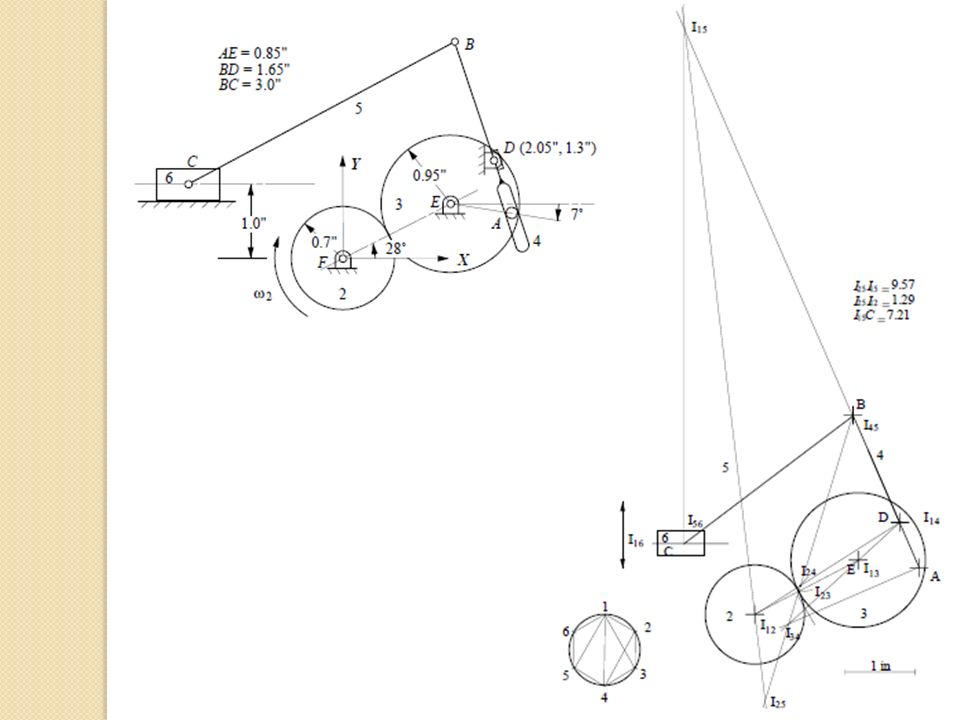
Diyagram Yöntemi : ADM’ lerinin bulunmasında yukarıdaki gibi tablo yaparak bulunacak ADM’ leri tespit edilebilir. Farklı olarak ise, bir de, Diyagram (Grafik) Yöntemi vardır. Bir örnek ile inceleyecek olursak : ÖR: Şekildeki mekanizma için bulunması gereken ADM’ lerini Tablo metoduna göre yazarsak : N = n.(n-1)/2 = 6.5/2=15 İlk elden yazabileceğimiz ADM’ lerini tablo üzerinde işaretlersek 10 tanesini tespit etmiş oluruz. 1 2 3 4 5 6 12 - 13 23 14 24 34 15 25 35 45 16 26 36 46 56
/2 = 6.5/2=15. İlk elden yazabileceğimiz ADM’ lerini tablo üzerinde işaretlersek 10 tanesini tespit etmiş oluruz")
15
Geriye 15-25-26-36-46 ADM’ lerinin bulunması kalmıştır
Geriye ADM’ lerinin bulunması kalmıştır. Bunların tespitini Diyagram Yöntemi ile yaparsak : Aranhold- Kennedy teoremi gereği, diyagram üzerinde herhangi 3 doğru üçgen şeklini alıyorsa, bu üç doğrunun belirttiği ADM’ leri aynı doğru üzerindedir. Bilinmeyen ADM’ ini gösteren doğruyu ortak kenar kabul eden iki üçgenin belirttiği doğruların kesim noktası aradığımız ADM’ ini verir. 1. Bunun için önce bir çember çizip mekanizmada bulunan uzuv sayısı kadar noktayı çember üzerinde işaretleriz. Noktalar düzlemleri; noktaları birleştiren doğrularda ADM’ lerini temsil eder. Şekilde (bu problem için ) çizilen doğrular düz ise temsil ettiği ADM’ leri biliniyor, kesikli ise ADM’ i bulunacak demektir.
 çizilen doğrular düz ise temsil ettiği ADM’ leri biliniyor, kesikli ise ADM’ i bulunacak demektir.")
16
2. Çözüm için diyagram üzerinde öyle iki üçgen bulmalıyız ki, iki üçgenin birer kenarları ortak ve bilinmeyen kenar olsun . Buna göre bilinmeyen ADM’ lerini bulabileceğimiz doğru imkanlarına bakacak olursak : Her bir bilinmeyen ADM için oluşturulan 4 doğrudan bilinen iki tanesinin çakıştırılmasıyla aranan ADM’ i bulunmuş olur. 15 16-65 14-45 13-35 12-25 25 23-35 12-15 26-65 24-45 26 12-16 25-65 24-46 23-36 36 13-16 65-53 23-26 46-43 46 16-14 65-54 26-24 63-34

17
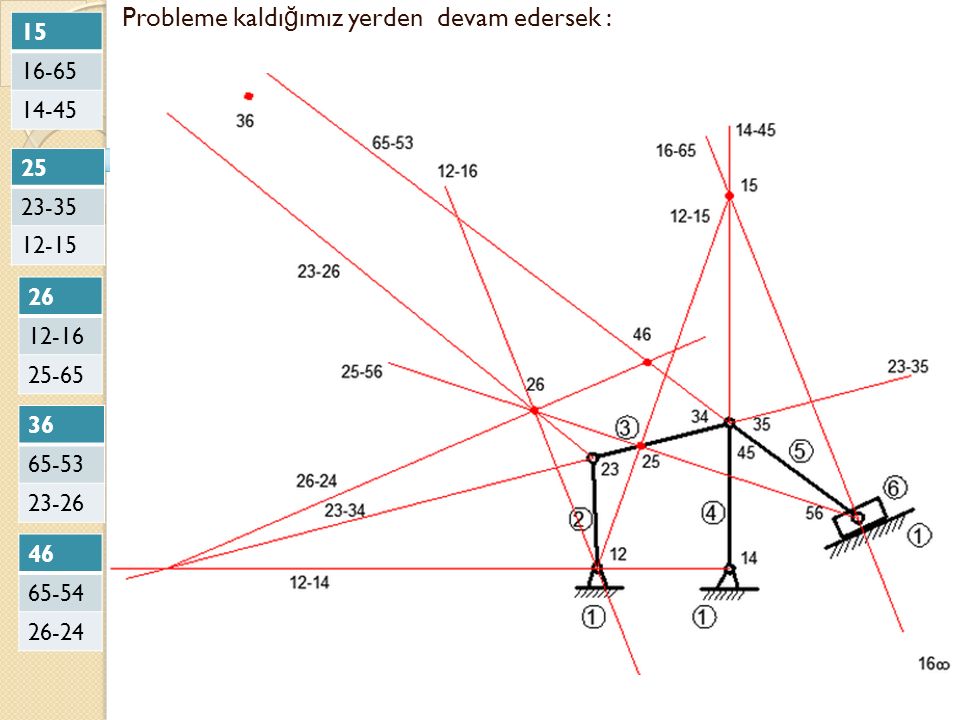
Probleme kaldığımız yerden devam edersek :
15 16-65 14-45 25 23-35 12-15 26 12-16 25-65 36 65-53 23-26 46 65-54 26-24
18
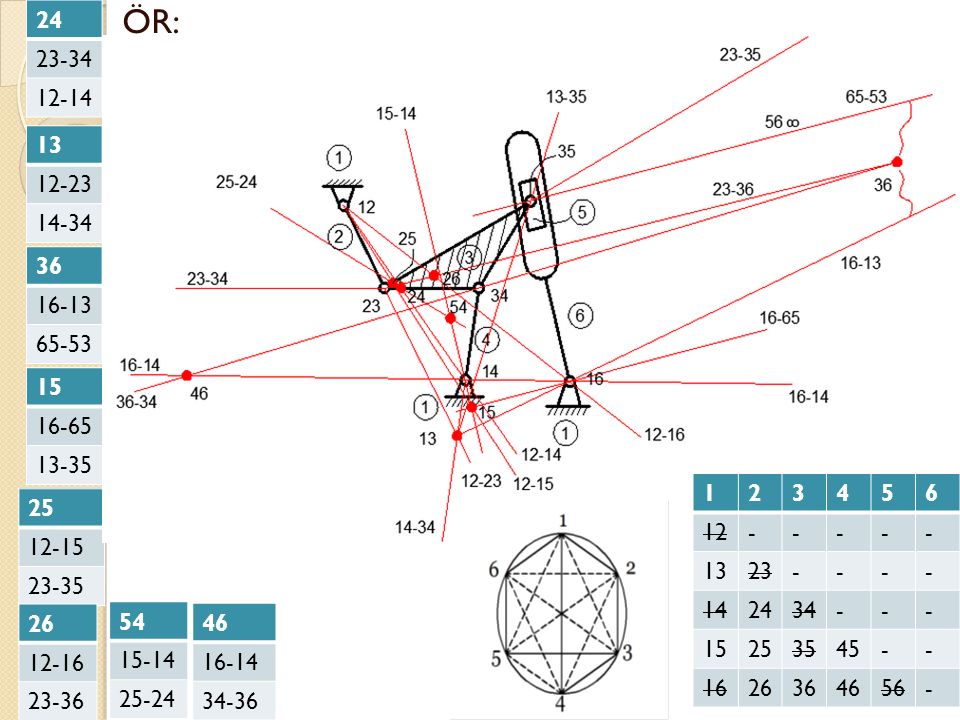
24 23-34 12-14 ÖR: 13 12-23 14-34 36 16-13 65-53 15 16-65 13-35 1 2 3 4 5 6 12 - 13 23 14 24 34 15 25 35 45 16 26 36 46 56 25 12-15 23-35 26 12-16 23-36 54 15-14 25-24 46 16-14 34-36
19
13 12-23 14-43 1 2 3 4 5 6 12 - 13 23 14 24 34 15 25 35 45 16 26 36 46 56 ÖR: 15 16-65 13-35 24 23-34 12-14 25 12-15 23-35 36 16-13 35-56 26 12-16 23-36 45 15-14 35-34 46 45-56 34-36

20
13 34-14 12-23 1 2 3 4 5 6 12 - 13 23 14 24 34 15 25 35 45 16 26 36 46 56 ÖR: 15 16-65 14-45 24 23-34 21-14 25 12-15 24-45 26 12-16 25-56 35 34-45 23-25 36 26-23 16-13 46 45-56 34-36

21
13 12-23 14-43 1 2 3 4 5 6 12 - 13 23 14 24 34 15 25 35 45 16 26 36 46 56 ÖR: 15 16-65 21-25 24 23-34 21-14 26 12-16 25-56 45 15-14 25-24

22
ÖR:

23
ÖR:

24
ÖR:

25
ÖR:

29
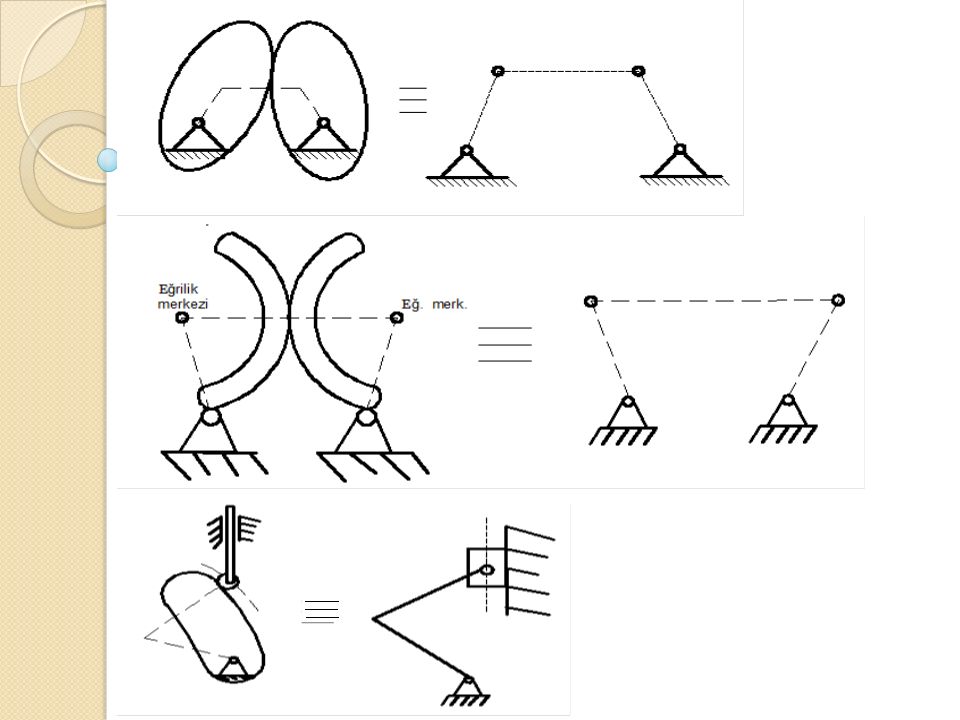
EŞDEĞER MEKANİZMALAR Giriş ve çıkış hareketleri aynı olan iki mekanizma kinematik olarak eşdeğerdir. Bu eşdeğerlik 2 türlüdür. 1. Sürekli Eşdeğerlik : Bu mekanizmalarda bir çevrim içindeki tüm konumlar için mekanizmanın giriş ve çıkış uzuvları aynı hareketi yaparlar. 2. Ani Eşdeğerlik : Kinematik analizde önemli ve yardımcı olan eşdeğerlik Ani Eşdeğerliktir. Yüksek eleman çifti içeren mekanizmaların kinematik analizi, bu mekanizmaları, sadece AEÇ’ lerinden oluşan mekanizmalara çevirmekle daha kolay yapılabilir. Çünkü yüksek EÇ’ lerinde eğrisel yüzeyler arası bağıl hareket genellikle kayma ve yuvarlanmanın belirsiz bir bileşkesidir. Ani eşdeğer mekanizmalar sadece ve sadece analizin yapıldığı anda aynı çıkış ve giriş hareketi üretirler.

31
BASİT MEKANİZMALAR Grashof Teoremi
En basit mekanizma olarak 4 kol mekanizması ele alınabilir. 4 uzuv ve 4 döner mafsaldan oluşan mekanizma, çoğu mekanizmanın esasını teşkil eder. Her farklı uzvun sabitlenmesiyle farklı bir mekanizma edilebilir. Burada döner çiftlerden birinin yerine kayar çift konulursa: Krank- biyel mekanizması elde edilir. Grashof Teoremi 4 kol mekanizmasında uzuvlardan biri sabitlendiğinde KOMŞU uzuvlar için tür hareket vardır! 1= Uzuv tam dönme yapar → Kol 2 = Uzuv salınım yapar → Sarkaç kol Uzuv ölçülerinin değişmesi, uzuvların yapacağı hareket şeklini değiştirir. Eğer → 2 ve 4 tam dönüyorsa → çift kol 2 tam dönme, 4 salınım → kol- sarkaç 2 ve 4 salınım yaparsa → çift sarkaç NOT: Grashof teoremi 1883 yılında düzlemsel 4 kol mekanizmasının hareket analizi problemi üzerine geliştirilmiştir

32
Bu durumda: 𝐿 𝑚𝑖𝑛 ve 𝐿 𝑚𝑎𝑥 belirlenerek diğer 2 uzuvla beraber Grashof Teoremine göre : 1. 𝐿 𝑚𝑖𝑛 + 𝐿 𝑚𝑎𝑥 < 𝐿 1 + 𝐿 2 iken a) 𝐿 𝑚𝑖𝑛 ’ e komşu bir uzuv sabitlenirse →kol-sarkaç kol b) 𝐿 𝑚𝑖𝑛 ’ e karşı uzuv sabitlenirse → çift sarkaç c) 𝐿 𝑚𝑖𝑛 sabitlenirse → çift kol mekanizması oluşur. 2. 𝐿 𝑚𝑖𝑛 + 𝐿 𝑚𝑎𝑥 > 𝐿 1 + 𝐿 2 iken herhangi bir uzuv sabitlenirse→ çift sarkaç 3. 𝐿 𝑚𝑖𝑛 + 𝐿 𝑚𝑎𝑥 = 𝐿 1 + 𝐿 2 iken belirsizlik konumlarına sahip mekanizmalar oluşur!
 𝐿 𝑚𝑖𝑛 ’ e komşu bir uzuv sabitlenirse →kol-sarkaç kol. b) 𝐿 𝑚𝑖𝑛 ’ e karşı uzuv sabitlenirse → çift sarkaç. c) 𝐿 𝑚𝑖𝑛 sabitlenirse → çift kol mekanizması oluşur. 2. 𝐿 𝑚𝑖𝑛 + 𝐿 𝑚𝑎𝑥 > 𝐿 1 + 𝐿 2 iken. herhangi bir uzuv sabitlenirse→ çift sarkaç. 3. 𝐿 𝑚𝑖𝑛 + 𝐿 𝑚𝑎𝑥 = 𝐿 1 + 𝐿 2 iken. belirsizlik konumlarına sahip mekanizmalar oluşur!")
35
ÖR:

36
ÖR:

37
ÖR:

38
ÖR:

39
HATIRLATMA Sinüs Teoremi : 𝑎 sin 𝐴 = 𝑏 sin 𝐵 = 𝑐 sin 𝐶







 :Cisimlerin yükseklik, genişlik ve derinlik boyutları ile ön, üst ve yan görünüşleri aynı anda birlikte görünecek şekilde.>")














