Sunuyu indir
1
ROBOT KONTROL SİSTEMLERİ VE UYGULAMA ALANLARI
Prof. Dr. Nusret TAN İnönü Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Müh. Bölümü

2
Elektrik-Elektronik Müh. Bölümü
Bölümümüzde toplam 15 akademik personel görev yapmaktadır. 5 Profesör, 3 Doçent, 3 Yardımcı Doçent ve 4 Araştırma görevlisi. Bölümümüzde hazırlık sınıfı zorunludur. %30 ingilizce eğitim verilmektedir. Lisans, Y. Lisans ve Doktora düzeyinde eğitim verilmektedir. Hazırlık, lisans ve lisansüstü yaklaşık olarak 850 kadar öğrencimiz bulunmaktadır.

3
Elektrik-Elektronik Müh. Bölümü
Türkiye’deki üniversiteler arasında Normal Öğretimde 35. sıralardayız ve İkinci Öğretimde 16. sıradayız. Bölümümüzde Elektrik Devreler, Elektronik, Mikroişlemciler, Elektrik Makinaları, Kontrol, Güç Elektroniği, Bilgisayar ve Araştırma Laboratuvarları mevcuttur. Genel olarak Enerji Sistemleri, Elektronik, Sinyal İşleme, Kontrol, Elektromanyetik ve Elektrik Makinaları alanlarında çalışmalar yapılmaktadır. Bölümümüzde yürütülen 4 Tübitak projesi bulunmaktadır. Bir yılda ortalama civarında bilimsel yayın yapılmaktadır.

4
Signals and Systems-Sinyaller ve Sistemler
Matematiksel olarak sinyaller bir yada daha fazla bağımsız değişkenin fonksiyonu olarak tanımlanır. EEG ECG

5
Signals and Systems-Sinyaller ve Sistemler

6
Signals and Systems-Sinyaller ve Sistemler
Sürekli zamanlı ve ayrık zamanlı sinyaller

7
Signals and Systems-Sinyaller ve Sistemler
Periyodik sinyal x(t)=x(t+T)
=x(t+T)")
8
Signals and Systems-Sinyaller ve Sistemler
Bütün periyodik sinyaller Fourier seriler ile gösterilebilir.

9
Signals and Systems-Sinyaller ve Sistemler

10
Signals and Systems-Sinyaller ve Sistemler

11
Signals and Systems-Sinyaller ve Sistemler
Sistemler sinyalleri işleyen mekanizmalardır.

12
Signals and Systems-Sinyaller ve Sistemler
Ayrık zamanlı ve sürekli zamanlı sistemler.

13
Signals and Systems-Sinyaller ve Sistemler
Nonlineer Sistemler, Zamanla Değişen sistemler…… Limit Cycles, Van de Pol denklemi

14
Signals and Systems-Sinyaller ve Sistemler
Chaos

15
Signals and Systems-Sinyaller ve Sistemler
Elektriksel Sistemler Aerodinamik Sistemler Uzaktan Kontrollü Sistemler Isıl Sistemler Akışkan Sistemler Bilgi İletim Sistemleri Mekanik Sistemler Elektromekanik Sistemler Endüstriyel Sistemler Foto - Elektrik Sistemler Elektromanyetik Sis. Ulaşım Sistemleri Ekonomik Sistemler Sosyal Sistemler Biyolojik Sistemler Tarım Sistemleri Ekolojik Sistemler

16
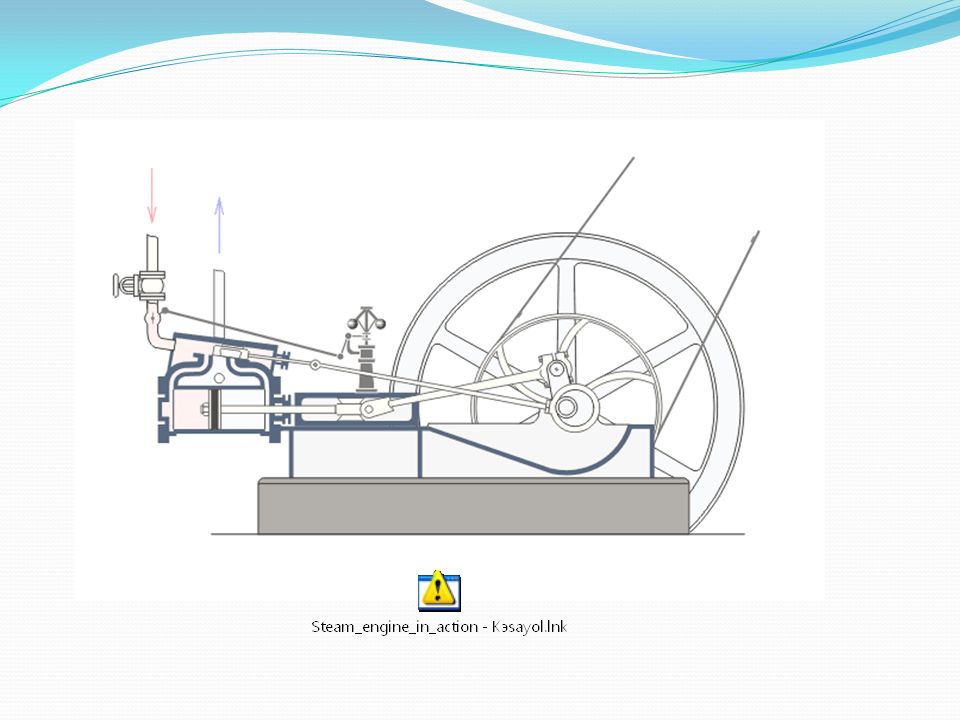
Teknolojinin Gelişimi
18. yüzyıl(1760 lar): Buhar Makinaları. 1900 ler: Elektrik Sistemleri 1950 ler: Transistörler, IC, Digital teknoloji. 1970 ler : Bilgisyar teknolojisi 1990 lar: İnternet ve Bilişim teknolojileri 2000 ler: Bilişim teknolojisi çağı(digital çağ)
: Buhar Makinaları ler: Elektrik Sistemleri ler: Transistörler, IC, Digital teknoloji ler : Bilgisyar teknolojisi lar: İnternet ve Bilişim teknolojileri ler: Bilişim teknolojisi çağı(digital çağ)")
21
Kişisel bilgisayar: (1) Ekran, (2) Ana kart (3) İşlemci (CPU) (4) Bellek (RAM) (5) Genişletme Kartları (PCI-X, AGP, v. b.) (6) Güç Kaynağı (7) Optik Disk Sürücü (DVD, CD, v. b.) (8) Sabit Disk (9) Klavye (10) Fare
 Ekran, (2) Ana kart (3) İşlemci (CPU) (4) Bellek (RAM) (5) Genişletme Kartları (PCI-X, AGP, v. b.) (6) Güç Kaynağı (7) Optik Disk Sürücü (DVD, CD, v. b.) (8) Sabit Disk (9) Klavye (10) Fare")
22
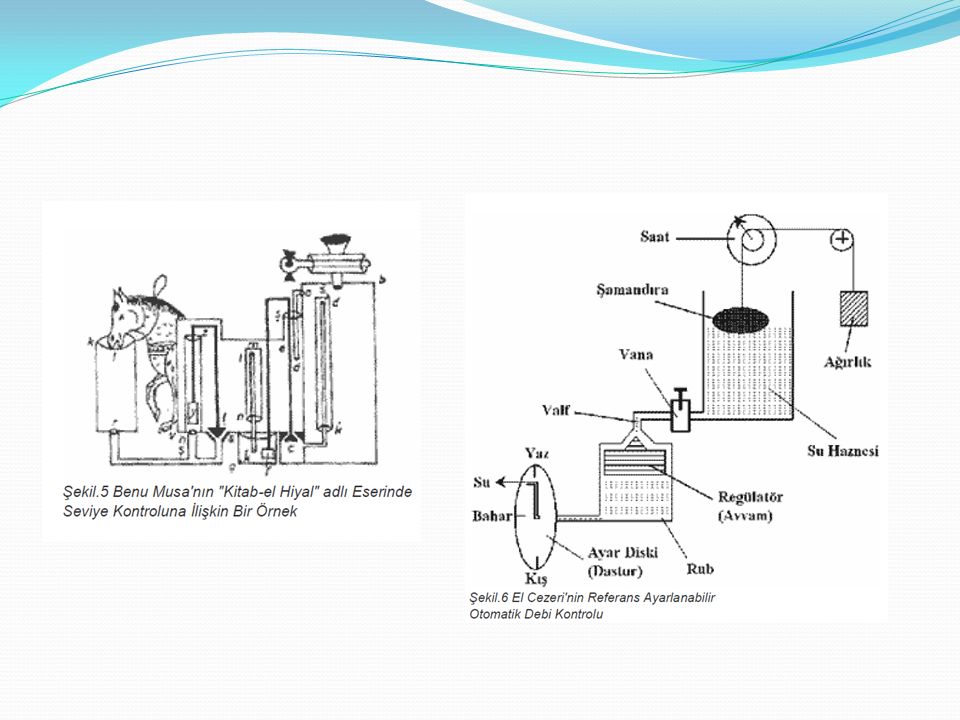
Kontrol Sistemleri Tarihi
Başta endüstriyel sistemler olmak üzere Elektrik, Elektronik, Mekanik ve Bilgisayar tabanlı tüm sistemlerin amaçlanan ve planlana biçimde çalışmasını sağlayan bilgi ve teknolojileri üreten ve uygulayan bir bilim dalıdır. M.Ö. III. Yüzyıl Tapınak kapılarının otomatik açılması M.S. 1. yy

24
1820

25
Uçak Kontrol Sistemleri 20. yy
Endüstriyel Kontrol Doğadaki canlıları taklit eden robotlar 19. yy da kontrol buhar ile yapılırken 20.yy da elektrik ve elektroniğin teknolojiye hakim olmasıyla kontrol elektriksel işaretlerle yapılmaya başlanmıştır

26
Açık çevirim ve kapalı çevirim kontrol sistemleri

27
Açık çevirim ve kapalı çevirim kontrol sistemleri

28
Kontrol Sistemleri Elektrik Sistemleri.
Örnek sistem: Bir elektrik devresi Kontrol işlevi: akım ve gerilim

29
Mekanik Sistemler Örnek sistem: araba Kontrol işlevi: arabanın konum açı ve hızı; direksiyonun konumu; fren ve gaz pedallarının konumu; vites konumu

30
Aerodinamik sistemler
Örnek sistem: uçak, füze Kontrol işlevi: Üç boyutta konum, hız ve ivme; konumu; Kabin basıncı; Motor hızı; hedefe olan uzaklık; vuruş açısı

31
Elektromekanik Sistemler
Örnek sistem: elektrik motoru Kontrol işlevi: Armatür gerilimi; armatür akımı; motor milinin açısı; açısal hız

32
Elektromekanik Sistemler
Örnek sistem: robot kolu Kontrol işlevi: Her bir eklemin konum, hız ve açısı; Motorlara uygulanan gerilimler

33
Uzaktan Kontrollü Sistemler
Örnek sistem: Internet üzerinden cerrahi operasyon yapan bir robot Kontrol işlevi: Hastanın konumu; Cerrahın el hareketleri; Robot elinin konumu

34
Endüstriyel Sistemler
Örnek sistem: Kağıt makinası Kontrol işlevi: Kağıt inceliği; Ham madde akış hızı; Kağıt parlaklığı

35
Endüstriyel Sistemler
Örnek sistem: Çelik levha üretim bandı Kontrol işlevi: Levha kalınlığı; Akan ham madde yoğunluğu; Demir oranı

36
Isıl Sistemler Örnek sistem: Bir oda Kontrol işlevi: Sıcaklık; Nem; Radyatör vanasının konumu

37
Foto-Elektrik Sistemler
Örnek sistem: Güneş paneli Kontrol işlevi: Güneş ışınlarının gelme açısı; Üretilen elektrik enerjisi

38
Akışkan Sistemler Örnek sistem: Bir sıvı tankı Kontrol işlevi: Tanktaki sıvı seviyesi; sıvı basıncı; debi

39
Elektromanyetik Sistemler
Örnek sistem: Elektromanyetik askı sistemi Kontrol işlevi: Topun konumu; Sargı akımı

40
Bilgi İşlem Sistemler Örnek sistem: İnternet Kontrol işlevi: ortalama veri akış hızı; bağlantı için bekleme süresi

41
Ulaşım Sistemler Örnek sistem: Şehir Trafiği Kontrol işlevi: Bir bölgede kırmızı ışıkta bekleyen araba sayısı; Bir sokaktaki ortalama araç hızı; Bir noktada kırmızı ışık yanma süresi

42
Sosyal Sistemler Örnek sistem: Toplum Kontrol işlevi: Birey sayısı, nüfus artışı

43
Ekonomik Sistemler Örnek sistem: Bir ülkenin ekonomisi Kontrol işlevi: enflasyon, ekonomik büyüme, vergi oranları

44
Biyolojik Sistemler Örnek sistem: İnsan vücudu Kontrol işlevi: nabız, tansiyon, kan şeker düzeyi, enjekte edilen insülin dozu

45
Tarım Sistemler Örnek sistem: Bir tarla Kontrol işlevi: Kullanılan gübre; Sulama sıklığı; Elde edilen ürün miktarı

46
Ekolojik Sistemler Örnek sistem: Bir petro-kimya tesisinin çevresi Kontrol işlevi: Çevreye salınan zehirli madde miktarı; İşlenen ham madde miktarı; Arıtma tesisleri için harcanan para

47
Robotik Sistemler

48
Robotik Sistemler

49
Robotik Sistemler

50
Robotik Sistemler

51
Robotik Sistemler

52
Robotik Sistemler

53
Modelleme Tüm bu sistemlerin ortak noktası davranışlarının matematiksel ifadelerinin birbirlerine benzemesidir. Çözüm diferansiyel denklemler?

54
Modelleme

55
Modelleme

56
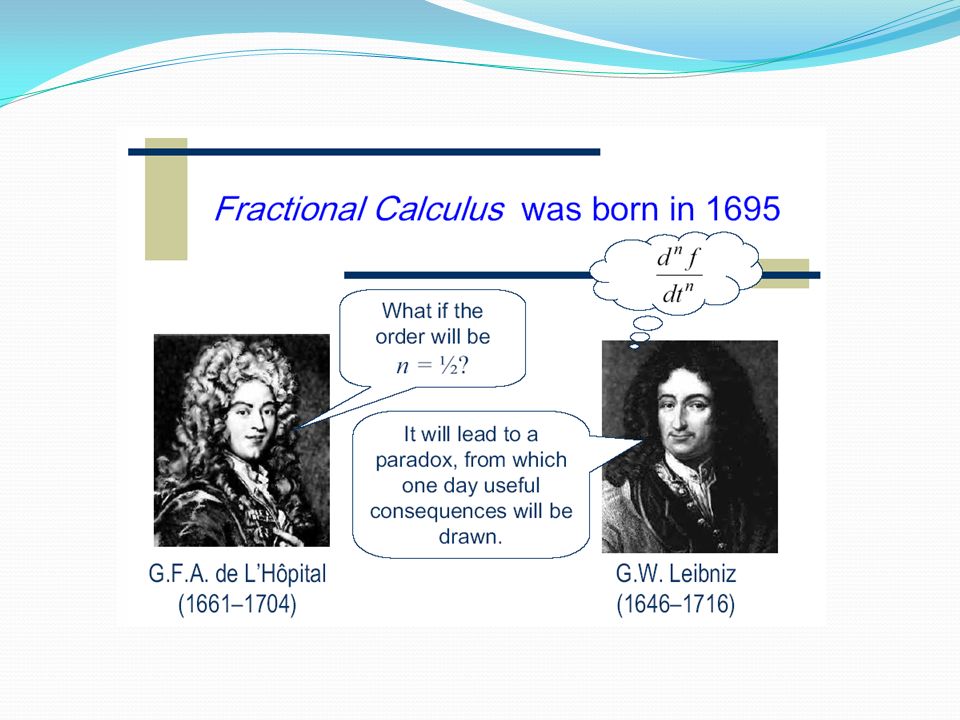
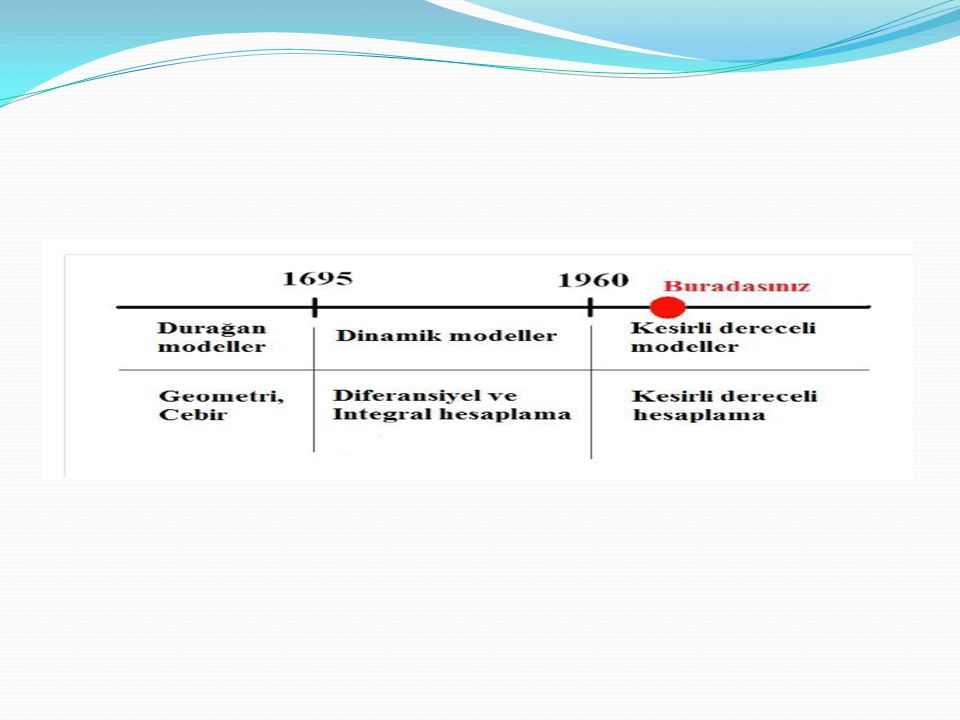
İnsan vücudu modeli? Çok kompleks….
Çözüm: Kesirli dereceli matematik (Fractional Order Calculus) Fractional-Order Calculus Integer-Order Calculus
 Fractional-Order Calculus. Integer-Order Calculus.")
59
TEŞEKKÜR EDERİM….. Bu sunumun hazırlanmasında bir çok kaynaktan yararlanılmıştır. İTÜ Kontrol Mühendisliği Web sayfasından yararlanılmıştır.

60
Merak, İlgi, Hayal Güçü,…….