Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
YER FOTOGRAMETRİSİ (2014) Doç. Dr. Eminnur Ayhan
 Doç. Dr. Eminnur Ayhan")
2
FOTOGRAMETRİDE KULLANILAN KAVRAMLAR
Fotoğraf, Görüntü Resim Çekme Makinesi ile elde edilen her bir görüntü Fotogrametri de Fotoğraf olarak adlandırılır ve Fotoğraf “merkezi izdüşüm” sonucu elde edilmiş iki boyutlu bir görüntüdür.

3
Bir noktaya göre yapılan izdüşüm merkezi iz düşümdür.
Bu izdüşüm şeklinde; izdüşüm ışınları bir noktada kesişir. Işınların kesiştiği noktaya izdüşüm merkezi adı verilir. Örneğin fotoğraf merkezi bir izdüşümdür. Böyle bir izdüşümde üç boyutlu bir uzay iki boyutlu bir düzleme izdüşürülmektedir.

4
İzdüşüm (Projeksiyon) Merkezi : (O)
Kamera optik sistemin merkezidir. Resim düzlemi dışında bulunan ve izdüşüm doğrularının üzerinden geçtiği noktadır. İzdüşüm Işını : İzdüşüm merkezi ile görüntü noktaları ve onların arazideki karşılıklarını birleştiren doğrulardır. Asal (Ana )Nokta: (H’) İzdüşüm merkezinden resim düzlemine inilen dikin, resim düzlemini kestiği noktadır. Aynı zamanda bu nokta resim koordinat sisteminin başlangıç noktasıdır.
Nokta: (H’) İzdüşüm merkezinden resim düzlemine inilen dikin, resim düzlemini kestiği noktadır. Aynı zamanda bu nokta resim koordinat sisteminin başlangıç noktasıdır.")
5
Metrik kamera : iç yöneltme elemanları belirli olan kameralardır.
Asal uzaklık: (OH’) İzdüşüm merkezinden resim düzlemine olan uzaklıktır.(OH’) uzaklığı genelde c ile gösterilir ve bu uzaklığa kamera sabiti adı da verilir. Asal Eksen : (H’OH doğru parçası) İzdüşüm merkeziyle asal noktayı birleştiren doğrudur. Bu eksen alım ekseni, kamera ekseni veya optik eksen olarak da adlandırılabilir. İç yöneltme elemanları ( x H’ , y H’ , c) : asal noktanın yeri (xH’ ,yH’ ) ile asal uzaklık ( c) den ayrıca mercek sistemindeki hatalardan (çapsal ve teğetsel distorsiyon) oluşan elemanlardır. Metrik kamera : iç yöneltme elemanları belirli olan kameralardır.
 İzdüşüm merkezinden resim düzlemine olan uzaklıktır.(OH’) uzaklığı genelde c ile gösterilir ve bu uzaklığa kamera sabiti adı da verilir. Asal Eksen : (H’OH doğru parçası) İzdüşüm merkeziyle asal noktayı birleştiren doğrudur. Bu eksen alım ekseni, kamera ekseni veya optik eksen olarak da adlandırılabilir. İç yöneltme elemanları ( x H’ , y H’ , c) : asal noktanın yeri (xH’ ,yH’ ) ile asal uzaklık ( c) den ayrıca mercek sistemindeki hatalardan (çapsal ve teğetsel distorsiyon) oluşan elemanlardır. Metrik kamera : iç yöneltme elemanları belirli olan kameralardır.")
6
PPA : Resim asal noktası
Fotoğraf (Görüntü) GÖSTERGELERİ A D C B F.C. S + X Y PPA F.C : Resim orta noktası S : Simetri noktası PPA : Resim asal noktası A,B,C,D : Gösterge işaretleri = Çerçeve işaretleri = Müşir noktaları
 GÖSTERGELERİ. A. D. C. B. F.C. S. + X. Y. PPA. F.C. : Resim orta noktası. S : Simetri noktası. PPA : Resim asal noktası. A,B,C,D : Gösterge işaretleri = Çerçeve işaretleri = Müşir noktaları.")
7
Resimler izdüşüm düzleminin yapısına göre fotoğrafik veya dijital olabilirler. Fotografik resimlerin üzerinde işlem yapılabilmesi için, bu resimlerin fotoğrafik işlemlerden geçmesi gerekmektedir. Dijital resimler ise direkt bilgisayar ortamına aktarılarak, gerekir ise üzerinde iyileştirme (image enhancement) yapılarak üzerlerinde işlem yapılabilir. Fotoğrafik olarak elde edilen resimler taranarak (scanning) dijital biçime getirilebilirler.
 yapılarak üzerlerinde işlem yapılabilir. Fotoğrafik olarak elde edilen resimler taranarak (scanning) dijital biçime getirilebilirler.")
8
Dijital Görüntünün Tanımı Ve Özellikleri
Raster veri modelinde her bir konum ayrı bir piksel ile ifade edilir. bu tür raster gösterimlerde her bir hücrenin koordinatı satır ve sütun numarası ile belirlenir ve koordinat başlangıcı olarak daima ekranın sol üst köşesi alınır. Yatay ekseni X (sutun), düşey eksen Y (satır) olarak adlandırılır. Raster yapıda piksel boyutu görüntünün hassasiyetini, ayırma gücünü gösterir. Piksellerin bu geometrik büyüklüğü (psx,psy) piksel sayısı, konumsal çözünürlük olarak adlandırılır. Ayrıca her bir piksel kapladığı arazi yüzeyi ile ilgili bilgilerde taşır. Bu bilgiler yoğunluk yada gri değerleri türünde olur ve bu tür bilgilere renk derinliği bir başka ifade ile radyometrik çözünürlük adı verilir.
, düşey eksen Y (satır) olarak adlandırılır. Raster yapıda piksel boyutu görüntünün hassasiyetini, ayırma gücünü gösterir. Piksellerin bu geometrik büyüklüğü (psx,psy) piksel sayısı, konumsal çözünürlük olarak adlandırılır. Ayrıca her bir piksel kapladığı arazi yüzeyi ile ilgili bilgilerde taşır. Bu bilgiler yoğunluk yada gri değerleri türünde olur ve bu tür bilgilere renk derinliği bir başka ifade ile radyometrik çözünürlük adı verilir.")
9
R (Kırmızı) Kırmızı (1,0,0) Magenta Mor (1,0,1) Mavi (0,0,1) Yeşil (0,1,0) Cyan Açık mavi (0,1,1) Sarı (1,1,0) Siyah (0,0,0) (1,1,1) Beyaz B (Mavi) G (Yeşil) Renkler bir yada birkaç renk uzayında sınıflandırılabilir. En çok bilinen renk uzaylarından biri RGB uzayı, diğeri HSV(Hue Saturation Value= renk doyma değeri) uzayıdır. RGB uzayı görüntü renklerinin ekranda daha kaliteli görüntülenebilmesi için, HSV uzayı ise insan gözünün görüntüyü daha kolay ve daha doğru yorumlayabilmesini sağlamak için dizayn edilmiştir.
 Sarı. (1,1,0) Siyah. (0,0,0) (1,1,1) Beyaz. B (Mavi) G (Yeşil) Renkler bir yada birkaç renk uzayında sınıflandırılabilir. En çok bilinen renk uzaylarından biri RGB uzayı, diğeri HSV(Hue Saturation Value= renk doyma değeri) uzayıdır. RGB uzayı görüntü renklerinin ekranda daha kaliteli görüntülenebilmesi için, HSV uzayı ise insan gözünün görüntüyü daha kolay ve daha doğru yorumlayabilmesini sağlamak için dizayn edilmiştir.")
10
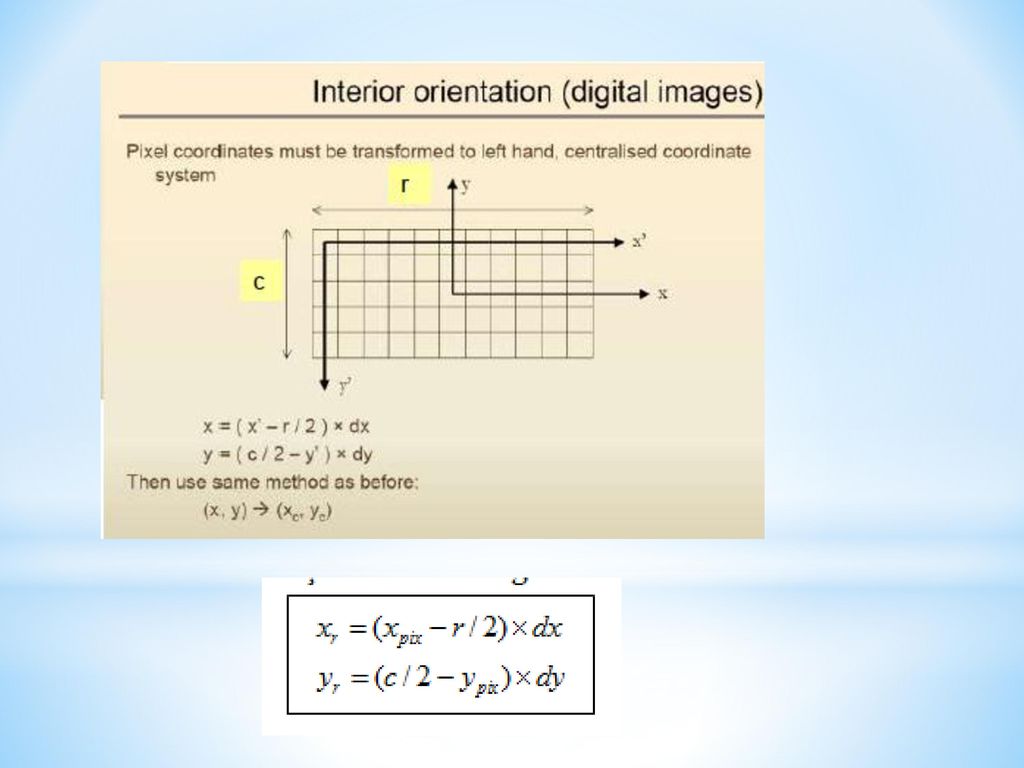
Dijital fotogrametrideki(raster yapıda)
koordinat sistemleri Piksel koordinat sistemi Görüntü koordinat sistemi(resim koordinat sistemi) Model koordinat sistemi Arazi koordinat sistemi Dijital görüntüdeki ölçümler bir piksel koordinat sisteminde ifade edilir. Görüntü koordinatları ve piksel koordinatları arasındaki ilişki pikselden görüntü koordinatına bir dönüşüm işlemi ile sağlanır.
 Model koordinat sistemi. Arazi koordinat sistemi. Dijital görüntüdeki ölçümler bir piksel koordinat sisteminde ifade edilir. Görüntü koordinatları ve piksel koordinatları arasındaki ilişki pikselden görüntü koordinatına bir dönüşüm işlemi ile sağlanır.")
11
Piksel Koordinat Sistemi
Bilgisayar ortamındaki resmin her bir elemanı Piksel olarak adlandırılır. Siyah-beyaz resimlerde piksel değerleri gri tonlarını veya değerlerini temsil eder. Renkli resimlerde ise aynı sırada üç farklı resim matrisi bulunur. Piksel koordinat sistemi yan yana ve alt alta bir grid ağı oluşturacak şekilde dizilmiş piksellerden meydana gelir ve başlangıç noktası görüntünün sol üst köşesidir. Piksellerin taşıdıkları renk değerleri, kullanılan kayıt elemanına ve işlemcilere bağlıdır. Renk piksellerde sayısal değer olarak ifade edilir.8 bitlik bir görüntü için renk değeri 0 ile 255 arasındadır. Bir başka deyişle bir piksel 256 farklı renk değeri alabilir. piksel

12
. x = ( x’p- x’0 ) * psx y = ( y’p- y’0 ) * psy
xp’, yp’’ : piksel koordinatları x y x0’ y0’ x0’,y0’ : piksel koordinat sistemindeki asal noktanın koordinatları . psy psx psx , psy : piksel uzayı içindeki x , y x = ( x’p- x’0 ) * psx y = ( y’p- y’0 ) * psy
 * psx. y = ( y’p- y’0 ) * psy.")
14
Görüntü Koordinat Sistemi (İki Boyutlu)
O : izdüşüm merkezi O’: izdüşüm merkezinin görüntü düzlemindeki karşılığı (görüntü koordinat sisteminin başlangıcı) bu noktanın üç boyutlu uzayda koordinatları xo, yo, c şeklinde tanımlanır. H: görüntü orta noktası W, , : görüntü koordinat sisteminin arazi koordinat sistemine göre dönüklükleri x’, y’ : görüntü koordinat sistemi eksenleri c: izdüşüm merkezinin görüntü düzlemine olan uzaklığı( asal uzaklık) P : herhangi bir noktanın görüntüsü, xp,yp bu noktanın görüntü koordinatları x ’ o z X w Y P’ x’ p y’ Z c O H Görüntü koordinat Sistemi
 bu noktanın üç boyutlu uzayda koordinatları xo, yo, c şeklinde tanımlanır. H: görüntü orta noktası. W, , : görüntü koordinat sisteminin arazi koordinat sistemine göre dönüklükleri. x’, y’ : görüntü koordinat sistemi eksenleri. c: izdüşüm merkezinin görüntü düzlemine olan uzaklığı( asal uzaklık) P : herhangi bir noktanın görüntüsü, xp,yp bu noktanın görüntü koordinatları. x. ’ o. z. X. w. Y. P’ x’ p. y’ Z. c. O. H. Görüntü koordinat Sistemi.")
15
O Dijital resimlerin fotogrametrik amaçlarda kullanılabilmesi için, piksel koordinat sistemi (x’y’) ile resim koordinat sistemi (xy) arasında bir ilişki kurulması gerekmektedir. ω . P Bu iki sistem (piksel ve görüntü koordinat Sistemleri) arasındaki geçiş iki boyutlu dönüşümler ile sağlanır. Piksel koordinat sisteminden görüntü koordinat sistemine geçiş AFIN veya BENZERLİK( helmert) dönüşümleriyle sağlanır. ω O’ c b a d Burada : row, col ... Scanner(piksel) -koordinatları x', y' ... görüntü- koordinatlarını, a, b, c, d, rowo, colo ...transformation parametrelerini ifade etmektedir. a, b : iki sistem arasındaki dönüklükle (ω) ilgili büyüklükler. c, d (rowo, colo) : iki sistem arasındaki ötelemeler ile ilgili büyüklükler. Görüntü koordinatları x ’, y’ eşitliğin ters dönüşüm formüllerinden elde edilir.
 ile resim koordinat sistemi (xy) arasında bir ilişki kurulması gerekmektedir. ω. . P. Bu iki sistem (piksel ve görüntü koordinat. Sistemleri) arasındaki geçiş. iki boyutlu dönüşümler ile sağlanır. Piksel koordinat sisteminden görüntü koordinat. sistemine geçiş AFIN veya BENZERLİK( helmert) dönüşümleriyle sağlanır. ω. O’ c. b. a. d. Burada : row, col ... Scanner(piksel) -koordinatları. x , y ... görüntü- koordinatlarını, a, b, c, d, rowo, colo ...transformation parametrelerini ifade etmektedir. a, b : iki sistem arasındaki dönüklükle (ω) ilgili büyüklükler. c, d (rowo, colo) : iki sistem arasındaki ötelemeler ile ilgili büyüklükler. Görüntü koordinatları x ’, y’ eşitliğin ters dönüşüm formüllerinden elde edilir.")
Benzer bir sunumlar




 :Cisimlerin yükseklik, genişlik ve derinlik boyutları ile ön, üst ve yan görünüşleri aynı anda birlikte görünecek şekilde.>")



 MOMENTİ>")









 = {P:|PF| = |PH| , Δ , F , P € Π } noktalarının kümesine parabol denir.>")
