Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
KİNEMATİK GPS DESTEKLİ UÇUŞ PLANLAMASI VE UÇUŞ PARAMETRELERİ
Prof.Dr.Ferruh YILDIZ

2
KİNEMATİK GPS DESTEKLİ UÇUŞ PLANLAMASI
Resim çekiminin planlanması ya o bölgenin küçük veya orta ölçekli bir haritası üzerinde, daha önce çekilmiş küçük ölçekli resimleri kullanılarak klasik şekilde ya da bilgisayar ortamında çeşitli programlar kullanılarak sayısal olarak yapılabilir. Günümüzde Özel Sektör, Harita Genel Komutanlığı (HGK), Tapu Kadastro Genel Müdürlüğü (TKGM) gibi kurumlarca icra edilen tüm uçuşlarda Kinematik GPS Destekli Fotogrametrik Uçuş Yöntemi kullanılmaktadır. Kinematik GPS yönteminde hem yerde hem de uçakta birer tane GPS alıcısı mevcuttur. Bu GPS alıcıları uçuş esnasında eş zamanlı ölçü yaparlar. Bu ölçüler büyük ölçekli çalışmalarda 1 sn. aralığında, küçük ölçekli ve hassas çalışmalarda ise 0.5 sn. aralığında gerçekleşir.
, Tapu Kadastro Genel Müdürlüğü (TKGM) gibi kurumlarca icra edilen tüm uçuşlarda Kinematik GPS Destekli Fotogrametrik Uçuş Yöntemi kullanılmaktadır. Kinematik GPS yönteminde hem yerde hem de uçakta birer tane GPS alıcısı mevcuttur. Bu GPS alıcıları uçuş esnasında eş zamanlı ölçü yaparlar. Bu ölçüler büyük ölçekli çalışmalarda 1 sn. aralığında, küçük ölçekli ve hassas çalışmalarda ise 0.5 sn. aralığında gerçekleşir.")
3
KİNEMATİK GPS DESTEKLİ UÇUŞ PLANLAMASI
GPS alıcısına bağlı olan kamera sistemi her bir fotoğraf çekiminde GPS verisine bir işaret(sinyal gönderir) koyar. Uçuş sonunda uçakta ve yerde elde edilen GPS verileri birlikte Static and Kinematic Positioning “SKIP” yada benzeri yazılımlarda işleme sokularak her bir fotoğrafa ait resim orta nokta koordinatları elde edilir. Bu koordinatlar fotogrametrik nirengi işlemleri sonucunda sadece blok köşelerinde yer alan nirengilere dayalı olarak gerçekleştirilen dengeleme işlemlerinde büyük faydalar sağlarlar.
 koyar. Uçuş sonunda uçakta ve yerde elde edilen GPS verileri birlikte Static and Kinematic Positioning SKIP yada benzeri yazılımlarda işleme sokularak her bir fotoğrafa ait resim orta nokta koordinatları elde edilir. Bu koordinatlar fotogrametrik nirengi işlemleri sonucunda sadece blok köşelerinde yer alan nirengilere dayalı olarak gerçekleştirilen dengeleme işlemlerinde büyük faydalar sağlarlar.")
4
KİNEMATİK GPS DESTEKLİ UÇUŞ PLANLAMASI
Günümüzde uçuş planlaması faaliyetleri tamamen bilgisayar destekli olarak yürütülmekte olup bu amaçla planlama yazılımları kullanılmaktadır. Örneğin HGK’da bu amaçla “Uçuş Planlaması” programı kullanılmaktadır. Bu programda gerçekleştirilen planlama faaliyetleri Autocad tabanlı çizim programları sayesinde çok sistematik ve hassas biçimde yürütülebilmektedir. Söz konusu programda kaydedilen plan, uçakta yer alan kamera ve GPS sistemi ile birlikte çalışan sisteme girildiğinde plan hem pilotun hem de navigatör/fotoğraf operatörünün önündeki ekranda görülebilmektedir. Bu şekilde pilot uçağı otomatik olarak istediği kolon üzerinde uçurabilmektedir.

5
KİNEMATİK GPS DESTEKLİ UÇUŞ PLANLAMASI
Uçak belirlenen sınırları aşarak uçuş doğrultusundan saptığı takdirde sistem navigatör/fotoğraf operatörüne çekilemeyerek pas geçilen fotoğraf ve/veya kolonları göstermektedir. Bu şekilde uçuş personelinin hata yapması hem de kolonlar arası açık kalması engellenmektedir.

6
PLANLAMA Öncelikle haritası yapılacak bölge belirlenir.
Bölge basılı haritalar veya eski fotoğraflar üzerinde belirlenebileceği gibi sayısal ortamda var olan raster haritalar veya koordinatlı görüntüler üzerinde de belirlenebilir. Bilgisayar ortamında yapılacak planlama işlemleri için haritası yapılacak bölge sayısal ortamda çizilerek veya sayısallaştırılarak da belirlenebilir.

7
PLANLAMA 2. Fotoğraf ölçeği belirlenir.
Fotoğraf ölçeği belirlenirken harita ölçeği, maliyet unsuru, yapılacak çalışmanın hassasiyeti, elde mevcut bulunan kameralar vb. gibi konular dikkate alınır. Kural olarak fotoğraf ölçeği harita ölçeğinin 4 katından küçük olmamalıdır. Pratik uygulamalarda; 1:1000 ölçekli harita yapımı için 1:3500 veya 1:4000, 1:5000 ölçekli harita yapımı için 1:16000, 1:25000 ölçekli harita yapımı için 1:35000 ölçekli hava fotoğrafları çekilir. İdeal olarak uçuş esnasında fotoğraf ölçeğinin artı ve eksi yönde %10 dan daha fazla değişmemesine dikkat edilir. Fotoğraf ölçeğine ilişkin bu özellikler planlama programına girilir.

8
PLANLAMA 3. Uçuş zamanı belirlenir. 203 sayılı kanun gereğince ülkemizde fotogrametrik harita yapımı amacıyla stereoskopik resim çekimi HGK ile TKGM’nün yetkisindedir. Diğer özel ve kamu kurumları HGK’dan uçuş izni alarak uçuşlarını gerçekleştirebilirler. Uçuş ideal olarak güneş ışığının yeryüzüne dik olarak geldiği yaz aylarında çekilmelidir. Aksi takdirde güneş ışığının eğik gelmesi nedeni ile çekilen fotoğraflarda gölgeli alan çok fazla olur. Ülkemizde resim çekimi Nisan başından Ekim sonuna kadar yapılabilmektedir Aynı zamanda fotoğraflarda ışık yetersizliği nedeni ile netlik ve parlaklık gibi sorunlar yaşanır. Aynı mantık ile gün içinde fotoğraf alım saatleri de, güneş ışığının dik ve net olarak yeryüzüne ulaştığı, pus ve sis olmayan öğlen saatleri (10.00 – 14.00) olarak tercih edilmelidir.
 olarak tercih edilmelidir.")
9
PLANLAMA 4. Uçuş yüksekliği belirlenir.
Kamera odak uzaklığı küçüldükçe uçuş daha yüksekten gerçekleşir. Yüksek uçuşlarda hassasiyet azalırken alçak uçuşlarda hassasiyet artar. Bu nedenle düz alanlarda ve küçük ölçekli çalışmalarda (revizyon gibi) kamera odak uzaklığı küçük olan kamera tercih edilmelidir. Yükseklik farkının çok fazla olduğu arazilerde ve büyük ölçekli çalışmalarda ise kamera odak uzaklığı büyük olan kamera tercih edilmelidir. ‘‘Fotoğraf ölçeği ( 1/mr ) = Odak uzaklığı/Uçuş Yüksekliği ’’ formülü dikkate alınır. Uçuş yüksekliği ile ilgili bilgiler de planlama programının ilgili kısımlarına girilir.
 kamera odak uzaklığı küçük olan kamera tercih edilmelidir. Yükseklik farkının çok fazla olduğu arazilerde ve büyük ölçekli çalışmalarda ise kamera odak uzaklığı büyük olan kamera tercih edilmelidir. ‘‘Fotoğraf ölçeği ( 1/mr ) = Odak uzaklığı/Uçuş Yüksekliği ’’ formülü dikkate alınır. Uçuş yüksekliği ile ilgili bilgiler de planlama programının ilgili kısımlarına girilir.")
10
PLANLAMA 5. Fotoğrafın arazide kapsadığı alan hesaplanır.
Bu hesap yapılırken S = s’ * mr eşitliği kullanılır. Bu eşitlikteki S fotoğrafın arazide kapsadığı mesafeyi, s’ fotoğraf boyutunu ( 23 cm. ) ve mr ise fotoğraf ölçeğinin payda değerini ifade eder. Bu bilgiler de programının ilgili kısımlarına girilir.
 ve mr ise fotoğraf ölçeğinin payda değerini ifade eder. Bu bilgiler de programının ilgili kısımlarına girilir.")
11
PLANLAMA 6. Boyuna bindirme oranı ve baz mesafesi hesaplanır.
İdeal olarak boyuna bindirme oranı %60-%65 olarak tespit edilmiştir. Bu oranın daha az olması durumunda üç boyutlu görüş imkanı azalır, oranın daha çok olması ise maliyeti artırır. Baz mesafesi ise b = s’ * mr * (1–p) eşitliği ile hesaplanır. Bu eşitlikteki b baz mesafesini, s’ fotoğraf boyutunu ( 23 cm. ), mr fotoğraf ölçeğinin payda değerini, p ise boyuna bindirme oranını (%60=0.6 gibi ) ifade eder. Bu bilgiler de yazılımın ilgili kısımlarına girilir.
 eşitliği ile hesaplanır. Bu eşitlikteki b baz mesafesini, s’ fotoğraf boyutunu ( 23 cm. ), mr fotoğraf ölçeğinin payda değerini, p ise boyuna bindirme oranını (%60=0.6 gibi ) ifade eder. Bu bilgiler de yazılımın ilgili kısımlarına girilir.")
12
PLANLAMA 7. Enine bindirme oranı ve kolonlar arası mesafe hesaplanır.
İdeal olarak enine bindirme oranı % 20 - % 30 olarak tespit edilmiştir. Bu oranın daha az olması durumunda kolonlar arasında açıklık olması ihtimali, oranın daha çok olması ise maliyet artar. Kolonlar arası mesafe ise e = s’ * mr * (1–q) eşitliği ile hesaplanır. Bu eşitlikteki e kolonlar arası mesafeyi, s’ fotoğraf boyutunu (23cm.), mr fotoğraf ölçeğinin payda değerini, q ise enine bindirme oranını (%30=0.3 gibi ) ifade eder. Bu bilgiler de bilgisayar programının ilgili kısımlarına girilir.
 eşitliği ile hesaplanır. Bu eşitlikteki e kolonlar arası mesafeyi, s’ fotoğraf boyutunu (23cm.), mr fotoğraf ölçeğinin payda değerini, q ise enine bindirme oranını (%30=0.3 gibi ) ifade eder. Bu bilgiler de bilgisayar programının ilgili kısımlarına girilir.")
13
PLANLAMA 8. Sınırlamalar belirlenir. Uçuşla ilgili en kritik sınırlama uçuş istikametinden yani kolondan sapmadır. Enine bindirme oranının minimum olarak %20 olduğu düşünülürse her iki yönde oluşabilecek maksimum %10 luk bir sapmaya izin verilebilir. Bir yönde %10 olan sapma diğer kolonda ters yönde %10 dan fazla oluşursa iki kolon arasında açıklıklar oluşur. Sınırlamalara ilişkin bu bilgiler de bilgisayar programının ilgili kısımlarına girilir.

14
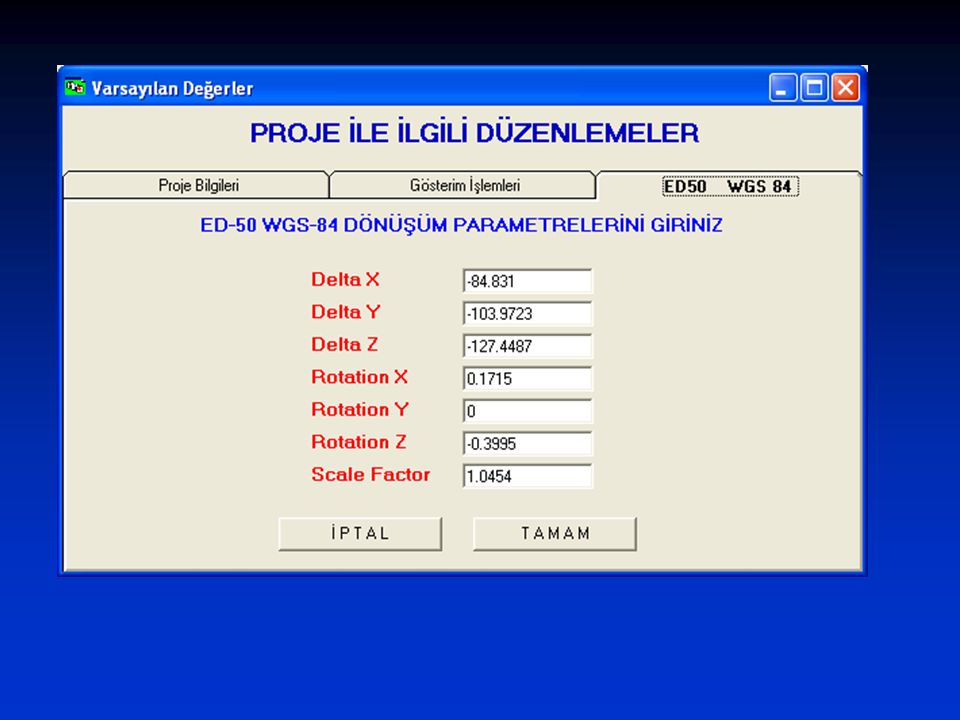
PLANLAMA 9. Koordinat bilgileri belirlenir.
Özellikle planlama bilgisayar destekli olarak gerçekleşiyorsa, planlamanın yapıldığı koordinat sistemi ile Kinematik GPS destekli olarak yapılacak uçuş koordinat sistemi arasında bir koordinasyon sağlanmalıdır. Bu nedenle planlama hangi koordinat sisteminde yapılıyorsa bu sistem programa tanıtılmalıdır.

15
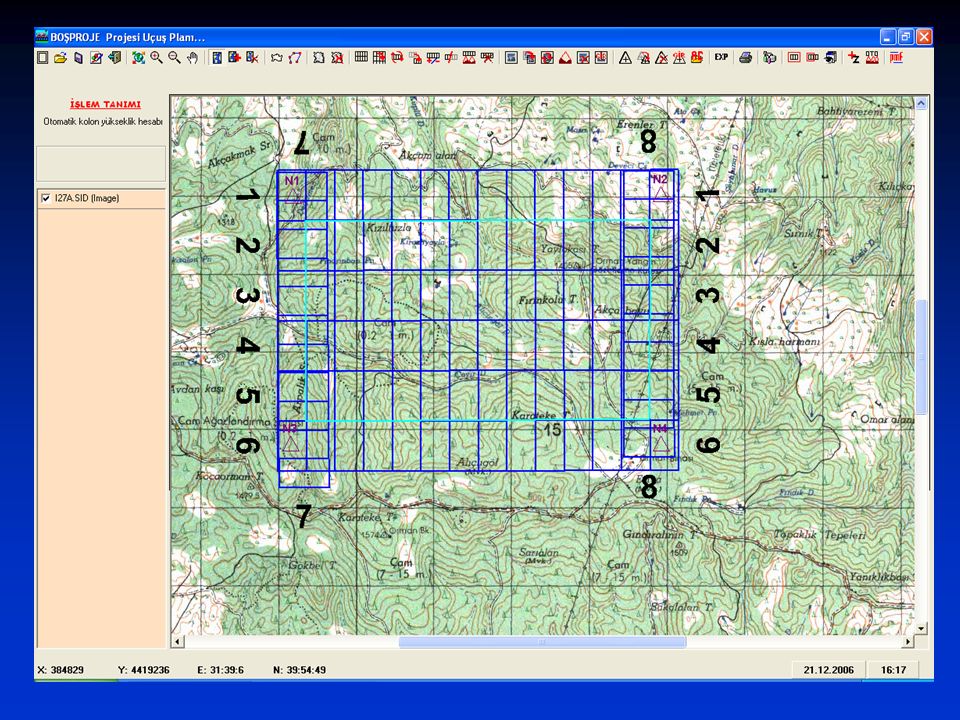
PLANLAMA 10. Planlamaya ilişkin çizimler yapılır. Kolonlar çizilir. Daha sonra nirengilerin konumları tespit edilir. Nirengilerin konumları Kinematik GPS destekli uçuş planlamasına uygun şekilde sadece blok köşelerinde olacak şekilde minimum seviyeye inmiştir. En son olarak dik (yada çapraz) kolonlar çizilir. Nirengilerin hem yatay hem de düşey kolonlarda görülmesi önem arz ettiğinden çapraz kolonların buna uygun olarak yerleştirilmesine dikkat edilir.
 kolonlar çizilir. Nirengilerin hem yatay hem de düşey kolonlarda görülmesi önem arz ettiğinden çapraz kolonların buna uygun olarak yerleştirilmesine dikkat edilir.")
16
PLANLAMA 11. Kolon yükseklikleri girilir. Kolonlar arası bindirmeler kontrol edilir. Kolondaki yükseklik farkına bağlı olarak ölçek değişimine dikkat edilir. Ölçek değişiminin maksimum %10 olması istenir. %10 dan fazla ölçek değişiminin oluşacağı kolonlar ise bölünerek ölçek korunur.

17
PLANLAMA 12. Uçuş yönü belirlenir.
a) Arazinin en az kolonla kapatılmasına, b) Bir paftanın en az sayıda ve en uygun konumda model ile kapatılmasına, c) Bir model içinde fazla yükseklik farkı olmasını önlemek amacıyla arazideki vadilere ve varsa dağ ve tepe sıralarına paralel uçulmasına, d) Akarsularda göl ve deniz kıyısına paralel uçulmasına dikkat edilir. e) Arazi yüzeyine (topografyasına) paralel uçulmasına dikkat edilir. (Bu yöntem çok zor olduğundan pek uygulanmamaktadır.)
 Arazinin en az kolonla kapatılmasına, b) Bir paftanın en az sayıda ve en uygun konumda model ile kapatılmasına, c) Bir model içinde fazla yükseklik farkı olmasını önlemek amacıyla arazideki vadilere ve varsa dağ ve tepe sıralarına paralel uçulmasına, d) Akarsularda göl ve deniz kıyısına paralel uçulmasına dikkat edilir. e) Arazi yüzeyine (topografyasına) paralel uçulmasına dikkat edilir. (Bu yöntem çok zor olduğundan pek uygulanmamaktadır.)")
18
PLANLAMA 13. Plan kaydedilir.
Planlama esnasında bilgisayar programları her bir fotoğrafın resim orta nokta koordinatını planlama koordinatında hesaplar. Ancak program plan kaydedilirken söz konusu koordinatları WGS84 sistemine dönüştürür. Çünkü uçuş esnasında, uçak bünyesindeki bulunan GPS alıcısı sayesinde uçak konumu tespit edilir ve uçulacak kolonlar yine GPS ölçüsünün yapıldığı WGS84 sisteminde gösterilir.

19
PLANLAMA 14. Nirengi koordinatları teslim edilir.
Plan hazırlandıktan sonra arazide tesis edilecek nirengilere ilişkin bilgiler ilgili kuruma teslim edilir. Nirengiler arazide tesis edilir, blokaj ve işaretlemeleri yapılır. Koordinatları teyit edilir. Plana son şekil verilir.

20
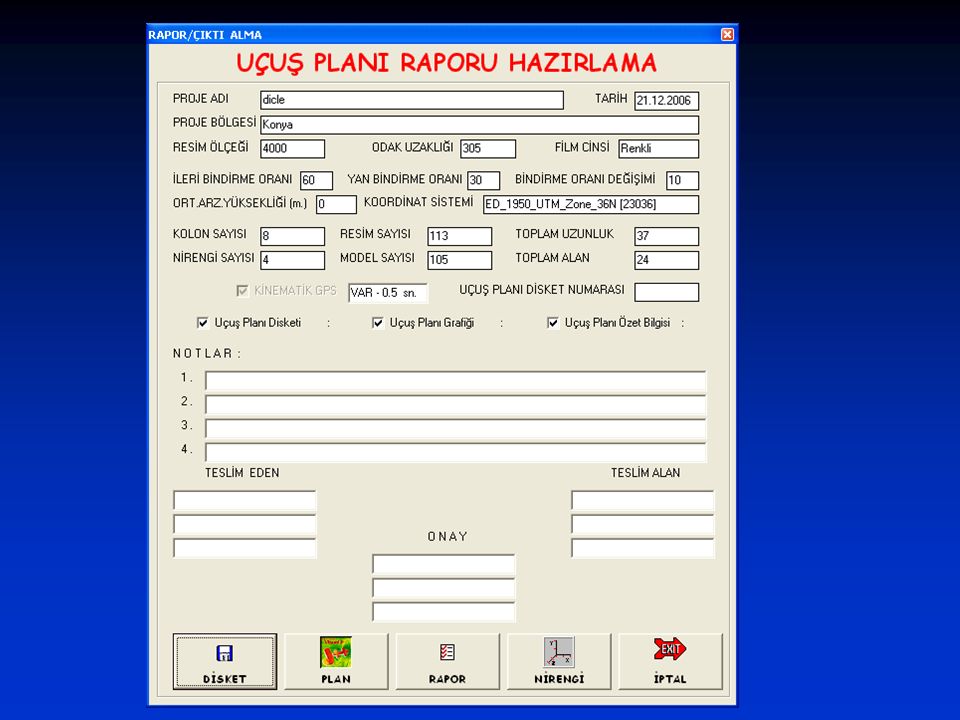
PLANLAMA 15. Plan Uçuş Ekibine teslim edilir. Sayısal ortamda elde edilen planla birlikte planla ilgili şekiller ve projeye ilişkin bilgiler düzenlenerek Uçuş Ekibine teslim edilir.

21
PLANLAMA 16. Uçuşla ilgili koordinasyon yapılır.
Bu koordinasyon faaliyetleri Uçuş Ekibi tarafından gerçekleştirilir. Bölgeye yakın hava alanı ile ilişki kurularak iniş kalkış izni ve yakıt ikmali için gerekli önlemler alınır. Ülke sınırlarına yakın alanların uçuşları için, Dışişleri Bakanlığı kanalı ile komşu ülkeden uçuş izni alınır. Söz konusu uçuşlarda komşu ülkenin müşahidi uçuşa nezaret eder ve uçuş sonucunda banyo edilen film üzerinde kendi ülkesine ait olan kısmı siler. Ülkemizde sınır bölgelerinin uçuşları yalnızca Harita Genel Komutanlığı tarafından yapılmaktadır.

22
PLANLAMA 17. Uçuş gerçekleştirilir. Uzun süreli uçuşlarda öncelikle uçuş bölgesine intikal edilir. Kısa süreli uçuşlarda aynı gün içinde hem intikal hem de fotoğraf alımı gerçekleştirilebilir. 18. Uçuş sonuçları incelenir.

23
Klasik yöntemle uçuş planlaması ( Hesaplamalar)
S = s * mr b = s * mr * ( 1 – p ) H = f * mr a = s * mr * ( 1 – q )
 H = f * mr. a = s * mr * ( 1 – q )")
24
UÇUŞ PLANLAMASI PROGRAMI

Benzer bir sunumlar


>")

















 Bakanlıklararası Harita İşlerini Koordinasyon.>")