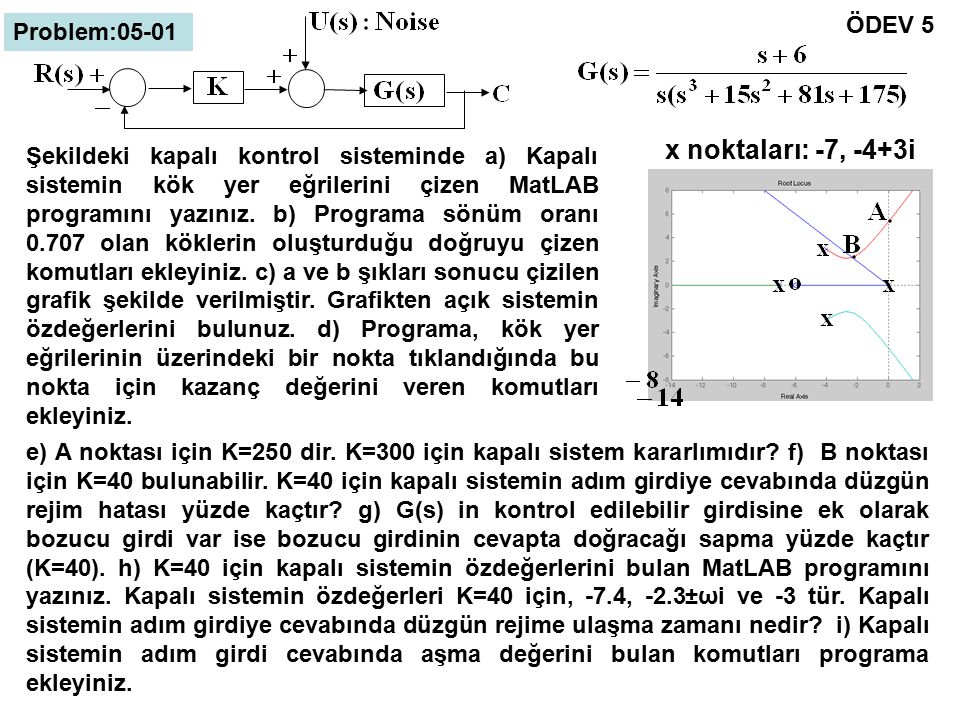
x noktaları: -7, -4+3i ÖDEV 5 Problem:05-01 Şekildeki kapalı kontrol sisteminde a) Kapalı sistemin kök yer eğrilerini çizen MatLAB programını yazınız. b) Programa sönüm oranı 0.707 olan köklerin oluşturduğu doğruyu çizen komutları ekleyiniz. c) a ve b şıkları sonucu çizilen grafik şekilde verilmiştir. Grafikten açık sistemin özdeğerlerini bulunuz. d) Programa, kök yer eğrilerinin üzerindeki bir nokta tıklandığında bu nokta için kazanç değerini veren komutları ekleyiniz. e) A noktası için K=250 dir. K=300 için kapalı sistem kararlımıdır? f) B noktası için K=40 bulunabilir. K=40 için kapalı sistemin adım girdiye cevabında düzgün rejim hatası yüzde kaçtır? g) G(s) in kontrol edilebilir girdisine ek olarak bozucu girdi var ise bozucu girdinin cevapta doğracağı sapma yüzde kaçtır (K=40). h) K=40 için kapalı sistemin özdeğerlerini bulan MatLAB programını yazınız. Kapalı sistemin özdeğerleri K=40 için, -7.4, -2.3±ωi ve -3 tür. Kapalı sistemin adım girdiye cevabında düzgün rejime ulaşma zamanı nedir? i) Kapalı sistemin adım girdi cevabında aşma değerini bulan komutları programa ekleyiniz.
Yanıt 05-01: (c) -4±3i, -7,0 ( e) Kararsız (f) 0 (g) % 2.5 (h) 2.7 s (a) ng=[1,6];dg=[1,15,81,175,0];rlocus(ng,dg) (b) hold on;plot([0,-8],[0,8]);hold off (d) rlocfind(ng,dg) (h) kp=40;dh=polyadd(dg,kp*ng);p=roots(dh) (i) sys=tf(kp*ng,dh);[c,t]=step(sys);plot(t,c);overs=max(c)-c(length(c)) (overs=3e-4 bulunur)
Thompson (Sh. 157) Problem 05-02 Kapalı sistemin kök yer eğrilerini çizen MatLAB programını yazınız. (Çizilen grafik şekilde verilmiştir). Kapalı sistemi kararsız kılan kritik kazancı (Kc) bulmak için gerekli komutu yazınız. (Kc≈2 bulunur). Kritik kazancı Routh kriteri ile de bulunuz. K=1 için sistem kararlımıdır? (K>Kc olmalı, kararsız). Sönüm oranı 0.65 olan kökleri veren K değerini belirleyen komutları yazınız. (hold on; line(20*[0,-0.65],20*[0,0.76]);hold off; rlocfind(…) K≈9 bulunur) K=9 için kapalı sistemin özdeğerlerini bulan, adım girdi cevabının grafiğini çizen, maksimum aşma değerini bulan MatLAB programını yazınız. Özdeğerler: -3.5±iw (w=4.1 olarak hesaplanabilir.) Düzgün rejime ulaşma zamanını bulunuz. (aşma: % 37.24, ts=1.8 s). K=9 için kapalı sistemin adım girdiye cevabında düzgün rejim hatasını bulunuz. Bozucu girdi (U) ya duyarlılığını belirleyiniz. (% 6.9, % 10.3) Hatayı ve bozucu etkiye duyarlılığı sıfırlamak için ne tür kontrol eklenmelidir? Aşmayı azaltmak için ne tür kontrol eklenmelidir?
Problem 05-03 Bir DC-motor kontrol sisteminin blok diyagramı aşağıda verilmiştir. Sayısal değerler: J=0.01; b=0.1;K=0.01;R=1;L=0.5; Tasarım kriterleri: ts<2, Maksimum aşma< %5, ess< %1 Problemi kök yer eğrilerini kullanarak çözünüz.
