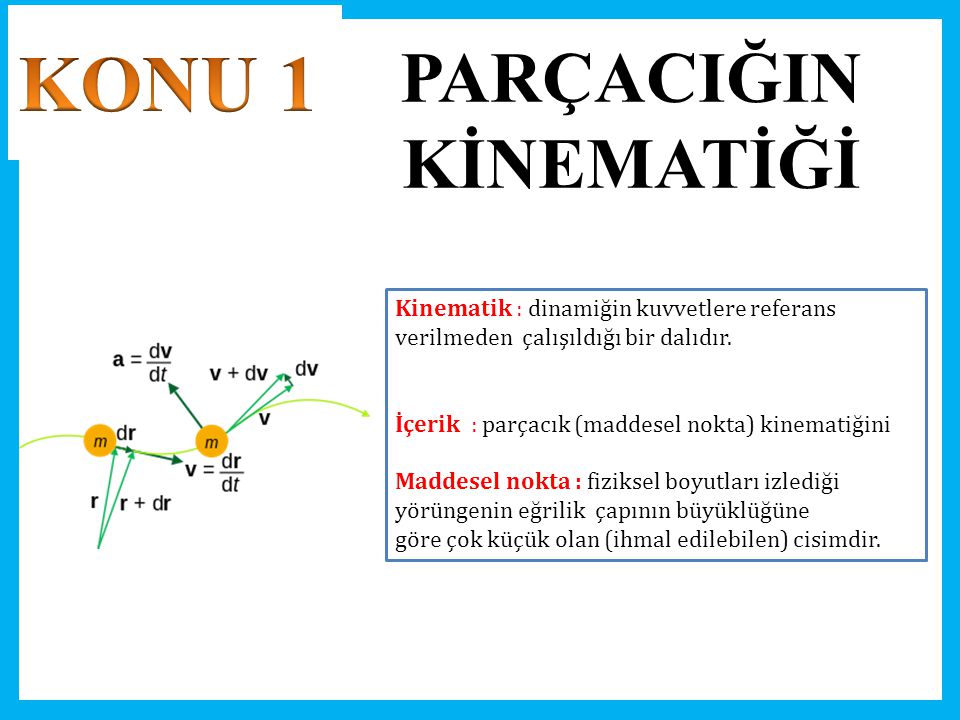
PARÇACIĞIN KİNEMATİĞİ KONU 1 PARÇACIĞIN KİNEMATİĞİ Kinematik : dinamiğin kuvvetlere referans verilmeden çalışıldığı bir dalıdır. İçerik : parçacık (maddesel nokta) kinematiğini Maddesel nokta : fiziksel boyutları izlediği yörüngenin eğrilik çapının büyüklüğüne göre çok küçük olan (ihmal edilebilen) cisimdir.
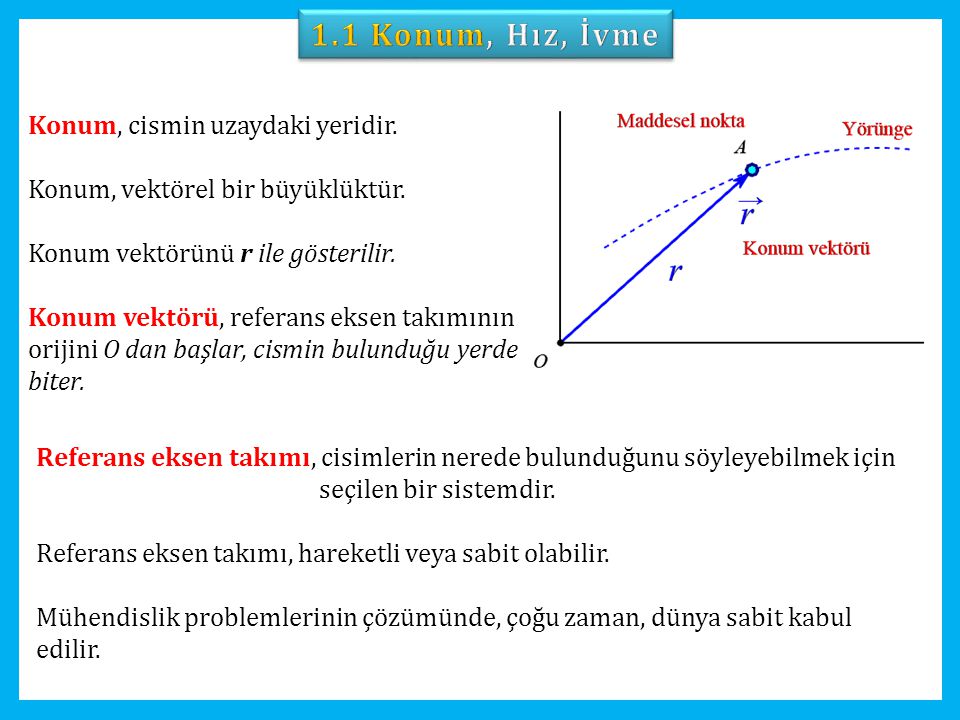
1.1 Konum, Hız, İvme Konum, cismin uzaydaki yeridir. Konum, vektörel bir büyüklüktür. Konum vektörünü r ile gösterilir. Konum vektörü, referans eksen takımının orijini O dan başlar, cismin bulunduğu yerde biter. Referans eksen takımı, cisimlerin nerede bulunduğunu söyleyebilmek için seçilen bir sistemdir. Referans eksen takımı, hareketli veya sabit olabilir. Mühendislik problemlerinin çözümünde, çoğu zaman, dünya sabit kabul edilir.
1.1 Konum, Hız, İvme Dünyaya bağlanmış bir eksen takımına göre söylenen konum, mutlak konumdur. Hareketli bir eksen takımına göre söylenen konum, bağıl konumdur. Hareketli bir eksen takımına göre tanımlanan harekete bağıl hareket denir. Eğer bir cismin hareketi incelenirken cismin kendi boyutlarının önemi yoksa o cisme maddesel nokta denir ve cismin kütle merkezinin hareketi incelenir. Bir maddesel noktanın zaman içerisinde bulunduğu konumların geometrik yerine yörünge denir. Yörünge, konum vektörlerinin uç noktalarının geometrik yeridir.
1.1 Konum, Hız, İvme Hız, cismin konumunda birim zamanda meydana gelen değişmedir. Hız, vektörel bir büyüklüktür. Hız vektörünü, v ile gösterilir. Hız vektörü, konum vektörünün zamana göre türevine eşittir. Yörünge üzerinde keyfi olarak seçilen bir orijinden (s = 0) itibaren yörünge üzerinden ölçülen konum Yön: Hız vektörü daima yörüngeye teğettir. Şiddet:
1.1 Konum, Hız, İvme İvme, cismin hızında birim zamanda meydana gelen değişmedir. İvme, vektörel bir büyüklüktür. İvme vektörünü a ile göstereceğiz. İvme vektörü, hız vektörünün zamana göre türevine eşittir. Yön: İvme vektörü daima yörüngenin iç bükey tarafına yönelmiştir. Şiddet:
1.1 Konum, Hız, İvme Hız vektörünün yönü veya şiddeti değişiyorsa ivme vardır. Hız vektörünün şiddeti değişiyorsa yönü değişmese de ivme vardır. Hız vektörünün yönü değişiyorsa şiddeti sabit olsa da ivme vardır. Hız vektörünün yönü de şiddeti de sabit ise ancak o zaman ivme sıfır olur.
1.2 Doğrusal Hareket Yörüngesi bir doğru olan harekete doğrusal hareket denir. Fakat yörünge üzerinde bir noktanın orijin olarak seçilmesi daha uygundur. Bu eşitlik sadece doğrusal harekette geçerlidir.
1.2 Doğrusal Hareket Doğrusal harekette hız ve ivme vektörleri daima yörüngeye paralel oldukları için bu vektörlerin sadece şiddetleri ile ilgilenmek yeterli olur. Hız ve ivme vektörlerinin hangi yönde olduklarını belirtmek için de şiddetleri pozitif veya negatif alınır. Orijinden itibaren bir taraf pozitif konumların bulunduğu taraftır ve diğer taraf da negatif konumların bulunduğu taraftır.
1.2 Doğrusal Hareket Aşağıdaki bağıntıların tamamı yukarıdaki iki bağıntıdan yola çıkarak elde edilmiş bağıntılardır. Doğrusal hareket problemlerinde zaman, konum, hız ve ivme büyüklükleri arasında s(t), v(t), a(t), v(s), a(v,s) vb. bağıntılar verilmiş olabilir.
1.2 Doğrusal Hareket İvme, sabit olduğu için integral dışında bırakılabilir.
1.2 Doğrusal Hareket
1.2 Doğrusal Hareket
1.2 Doğrusal Hareket
1.2 Doğrusal Hareket Sadece yerçekimi etkisinde düşey olarak doğrusal hareket yapan bir maddesel noktanın ivmesi daima düşey ve aşağı doğrudur.
Örnek Problemler 1 SORU: Bir cisim x-ekseni boyunca sabit bir ivme ile hareket etmektedir. t = 0 anında xo = − 6 m ve vxo = 4 m/s dir. Ayrıca t = 10 s anında x in değeri maksimum değere ulaşmıştır. xmaks değerini ve t = 15 s anındaki x değerini bulunuz. t = 0 ile t = 15 s zaman aralığında maddesel noktanın konumundaki değişmeyi ve katettiği yolu bulunuz.
Örnek Problemler 1
Örnek Problemler 1 2. Yöntem :
Örnek Problemler 2 SORU: Doğrusal hareket yapan bir araba, hareketsiz iken 10 s içinde düzgün bir şekilde sıfıra inen 6 m/s2 lik bir ivme ile harekete başlıyor ve 10 s sonunda da sabit şiddette bir hızla harekete devam ediyor. Başlangıçtan itibaren katettiği yol ne kadar sürede 400 m olur?
Örnek Problemler 2
Örnek Problemler 2
Örnek Problemler 3 SORU: s = 0 konumundan ilk hızsız olarak harekete başlayan ve doğrusal hareket yapan bir motosikletin ivmesi konuma bağlı olarak şekildeki gibi değişmektedir. s = 200 m iken motosikletin hızını bulunuz.
Örnek Problemler 3 SORU: s = 0 konumundan ilk hızsız olarak harekete başlayan ve doğrusal hareket yapan bir motosikletin ivmesi konuma bağlı olarak şekildeki gibi değişmektedir. s = 200 m iken motosikletin hızını bulunuz.
Örnek Problemler 4 SORU: Şekildeki plancırın ve şaftın yatay hareketi, şafta bağlı diskin yağ içerisinde hareket etmesinden dolayı dirençle karşılaşmaktadır. Plancırın A konumunda x = 0 ve t = 0 iken hızı v0 dır. Yavaşlatıcı olan ivme ise hız ile doğru orantılı, yani a = − k v dir. Burada k bir sabittir. Plancırın hızı v yi ve konumunun koordinatı x i t cinsinden veren bağıntıları elde ediniz. Ayrıca v yi x e bağlı olarak yazınız.
Örnek Problemler 4 a = − k v a = − k v
Örnek Problemler 4 x-t bağıntısı için alternatif çözümler veya