Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
Devre ve Sistem Analizi Neslihan Serap Şengör Elektronik ve Haberleşme Bölümü, oda no:1107 tel no:0212 285 3610 sengorn@itu.edu.tr

2
Ders Hakkında 1 Yarıyıl içi sınavı 11 Nisan 2016 % 30 3 Kısa sınav 7 Mart 28 Mart 2 Mayıs % 30 1 Ödev +10 Yarıyıl Sonu Sınavı % 40 Ders notlarına ve ders ile ilgili bazı dökümanlar erişmek için Ninova – EHB 232 - Dersin kaynakları http://ninova.itu.edu.tr/tr/dersler/elektrik-elektronik-fakultesi/4647/ehb-232/ekkaynaklar/ FİNAL SINAVINA GİRMEYE HAK KAZANMAK İÇİN YARIYIL İÇİ DEĞERLENDİRMELERİNDEN EN AZ 15 ALMAK GEREKMEKTEDİR.

3
Kaynaklar: Yılmaz Tokad, “ Devre Analizi Dersleri” Kısım II, İ.T.Ü. Yayınları, 1977. Yılmaz Tokad, “ Devre Analizi Dersleri” Kısım IV, Çağlayan Kitabevi, 1987. Cevdet Acar, “Elektrik Devrelerinin Analizi” İ.T.Ü. Yayınları, 1995. L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York ( İşlenen Bölümler: 9,10,11,13) M. Jamshidi, M. Tarokh, B. Shafai. “Computer-Aided Analysis and Design of Linear Control Systems”, Prentice Hall, 1992 ( İşlenen Bölümler: 2,3)
 M. Jamshidi, M. Tarokh, B. Shafai. Computer-Aided Analysis and Design of Linear Control Systems , Prentice Hall, 1992 ( İşlenen Bölümler: 2,3).")
4
Sistem http://windows.microsoft.com/en-us/windows/computer-parts#1TC=windows-7 http://bpastudio.csudh.edu/fac/lpress/vbmodules/hdts/computerComponents.htm http://www.herbalremediesadvice.org/structure-of-the-nervous-system.html

5
Sistem Dağılmış Parametreli Toplu Parametreli Stokastik Deterministik Ayrık zamanSürekli zaman Lineer olmayan Lineer Zamanla değişen Zamanla değişmeyen

6
6 Neden Matematiksel Modelleme? 4. Baskı sf. 98...Bilimsel yöntemin gerçek amacı, Doğa’nın aslında bilmediğiniz bir şeyi bildiğinizi sanmanıza yol açarak sizi kandırmasına izin vermemektir. Bundan çok çekmemiş, buna karşı içgüdüsel olarak tetikte olmayan bir tek tamirci, bilimadamı ya da teknisyen yoktur. Bilimsel ve mekanik bilgilerin büyük çoğunluğunun böylesine sıkıcı ve ihtiyatlı olmasının nedeni budur. Bilimsel enformasyona ara sıra fanteziler katıp romantize ederseniz ya da özen göstermezseniz Doğa hemen sizi rezil eder....

7
Elektrik Devrelerinin Temelleri dersinde neler öğrendiniz? Amaç: Fiziksel devrelerin elektriksel davranışlarını öngörme akım ve gerilim Devre Teorisinin Aksiyomları: Devre TeorisindeTanımlanmamış Büyüklükler :akım ve gerilim Toplu parametreli, KAY, KGY Eleman Tanım Bağıntıları:Lineer ve lineer olmayan direnç elemanları, Kapasite, Endüktans Lineer zamanla değişmeyen devrelere özgü yöntemler: Düğüm gerilimleri, çevre akımları Bazı Teoremler:Tellegen Teoremi, Toplamsallık ve Çarpımsallık, Thevenin ve Norton Teoremleri Dinamik Devreler ve Çözümleri

8
Devre ve Sistem Analizi Sistem Durum Denklemleri ( Hatırlatma ) 2. Mertebeden Diferansiyel Denklemlerin Çözümü (Hatırlatma) Temel matris, Durum Geçiş matrisi, Öz çözüm, Zorlanmış Çözüm, Tam Çözüm (Hatırlatma) Yüksek Mertebeden Devrelerin Durum Denklemlerin Çözümü Durum geçiş matrisinin özellikleri, Durum geçiş matrisini hesaplama yöntemleri: seriye açma, Jordan kanonik yapısı, Laplace dönüşümü ( hatırlatma ) Sistem Özellikleri: Yönetilebilirlik, Gözlenebilirlik ve Kararlılık Ön bilgi: Cayley-Hamilton teoremi, zamana bağlı fonksiyonların lineer bağımsızlığı, Yönetilebilirlik, Gözlenebilirlik, Frekans tanım bölgesinde yönetilebilirlik, gözlenebilirlik, minimal gerçekleme, Lyapunov anlamında kararlılık, asimptotik kararlılık, Routh Hurwitz kriteri
 Temel matris, Durum Geçiş matrisi, Öz çözüm, Zorlanmış Çözüm, Tam Çözüm (Hatırlatma) Yüksek Mertebeden Devrelerin Durum Denklemlerin Çözümü Durum geçiş matrisinin özellikleri, Durum geçiş matrisini hesaplama yöntemleri: seriye açma, Jordan kanonik yapısı, Laplace dönüşümü ( hatırlatma ) Sistem Özellikleri: Yönetilebilirlik, Gözlenebilirlik ve Kararlılık Ön bilgi: Cayley-Hamilton teoremi, zamana bağlı fonksiyonların lineer bağımsızlığı, Yönetilebilirlik, Gözlenebilirlik, Frekans tanım bölgesinde yönetilebilirlik, gözlenebilirlik, minimal gerçekleme, Lyapunov anlamında kararlılık, asimptotik kararlılık, Routh Hurwitz kriteri.")
9
s- Tanım Bölgesinde Devre Denklemleri Genelleştirilmiş Düğüm Gerilimleri Yöntemi, Genelleştirilmiş Çevre Akımları Yöntemi, Çözümün Varlığı ve Tekliği, Öz Çözüm ve Devreye İlişkin Öz Frekanslar, Toplamsallık, çarpımsallık, Thevenin- Norton teoremleri, İki kapılılıar, devre parametreleri, resiprokluk teoremi, Blok Diyagramları İşaret Akış Diyagramları Sürekli Sinüsoidal Hal (SSH) Kompleks sayılar (hatırlatma), Empedans, admitans kavramı, Sürekli Sinüsoidal Hal’de devre denklemleri, Genelleştirilmiş Düğüm Gerilimleri Yöntemi, Genelleştirilmiş Çevre Akımları Yöntemi, SSH’de Güç ve Enerji Kavramları Kompleks güç, Kompleks gücün sakınımı, Maksimum güç transferi, Üç fazlı devreler, Bode diyagramları Devre
 Kompleks sayılar (hatırlatma), Empedans, admitans kavramı, Sürekli Sinüsoidal Hal’de devre denklemleri, Genelleştirilmiş Düğüm Gerilimleri Yöntemi, Genelleştirilmiş Çevre Akımları Yöntemi, SSH’de Güç ve Enerji Kavramları Kompleks güç, Kompleks gücün sakınımı, Maksimum güç transferi, Üç fazlı devreler, Bode diyagramları Devre")
10
Dinamik Sistem Sistemin şu an ki çıkışlarını geçmişdeki girişleri ve çıkışları belirliyorsa... Dinamik sistem gösterimleri Ayrık zaman-fark denklemleri Sürekli zaman-diferansiyel denklemler Dinamik sistem Ayrık zaman Sürekli zaman Hatırlatma

11
Durum Denklemleri durum değişkenleri - kapasite gerilimleri, endüktans akımları çıkış büyüklükleri - ilgilenilen eleman akımları ve gerilimleri giriş büyüklükleri - bağımsız akım kaynağının akımı ve bağımsız gerilim kaynaklarının gerilimleri EDT dersinde n=2 için çözümler bulundu Hatırlatma

12
2. Mertebeden Diferansiyel Denklemlerin Çözümü Homojen kısım: Çözüm Tahmini belirlememiz gereken kaç büyüklük var? sıfırdan farklı çözümlerin olması nasıl mümkün olur? Karakteristik Denklem Hatırlatma

13
Karakteristik denklemin kökleri: özdeğerler Belirlememiz gereken özvektör Hangi uzayın elemanı? O uzaya ait neyi belirlersek aradığımızı bulmuş oluruz? ‘e ilişkin özvektör Temel Matris Özel çözüm: Tam çözüm: Nasıl belirleyeceğiz? Hatırlatma

14
Durum Geçiş Matrisi öz çözüm zorlanmış çözüm öz çözüm zorlanmış çözüm Hatırlatma

15
Yüksek Mertebeden Devrelerin Durum Denklemlerin Çözümü Temel Matris 2. Mertebeden Diferansiyel Denklemlerin Çözümü iki sütunu var ve her sütun lineer bağımsız ve çözüm Durum Geçiş Matrisi Ne yapmakta?

16
Durum geçiş matrisinin özellikleri Durum Geçiş matrisi 1-

17
2- İlgilendiğimiz Sistemler Çözüm

18
İlgilendiğimiz Sistemler Yarsayım: Yarsayımı yerleştirirsek * ** * ve **’dan

19
Lineer Zamanla Değişmeyen Sistemler için: Çözümü bulmak için ‘nin belirlenmesi gerekiyor.

20
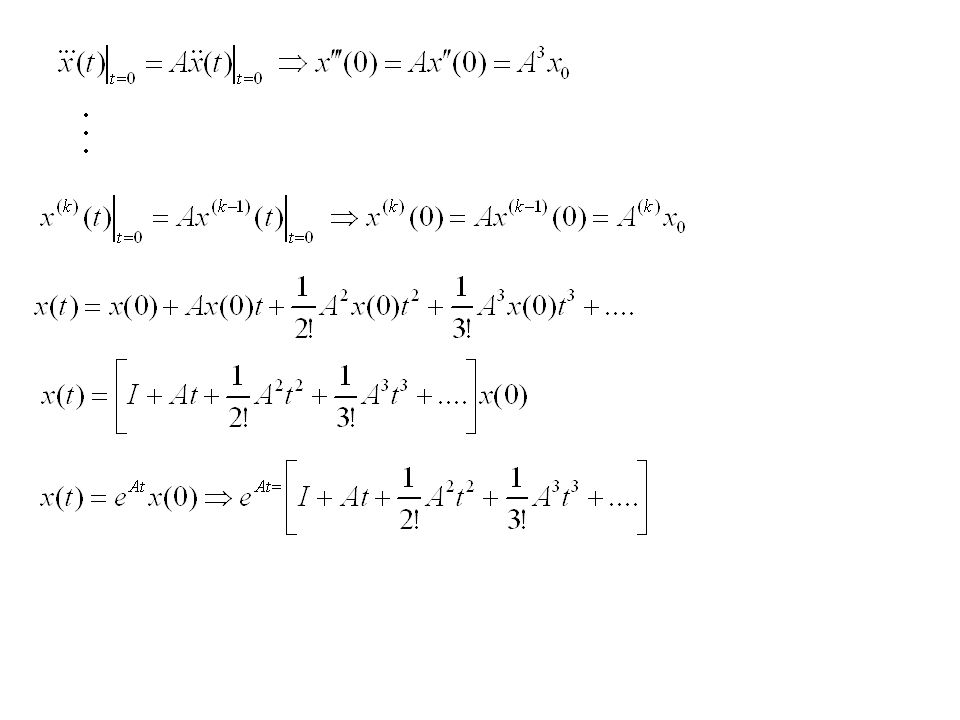
1- Seriye Açma Hesaplama Yöntemleri civarında ‘nin MacLaurin açılımı: Hatırlatma ‘yi belirlemek için bilmek gerekli

22
Bir örnek: A matrisine ilişkin matrisini hesaplayınız.

23
2- Jordan Kanonik Yapısı Elemanter işlemler: (1) Satır (Sütun) değiştirme (2) Satır (Sütun)’u bir sabit ile çarpma (3) Satır (Sütun ) toplama Elemanter işlemler sonucunda rank değişmez. Hatırlatma Benzerlik dönüşümü ile matris özel bir yapıya getirilecek

24
Dönüşümü nasıl belirleyeceğiz? P’nin sütunları özvektörlerden oluşuyor 1) özdeğerler katsız: sağlayan ‘ler belirlenecek 2) özdeğerler m katlı: m tane özvektör bulunmalı ise m tane lineer bağımsız özvektör (1)’deki gibi bulunur. ise m tane lineer bağımsız özvektör genelleştirilmiş özvektör hesaplanarak bulunur..
 özdeğerler katsız: sağlayan ‘ler belirlenecek 2) özdeğerler m katlı: m tane özvektör bulunmalı ise m tane lineer bağımsız özvektör (1)’deki gibi bulunur. ise m tane lineer bağımsız özvektör genelleştirilmiş özvektör hesaplanarak bulunur...")
Benzer bir sunumlar










’in zamana göre türevi çözümler boyunca Gradyen sistemlere ilişkin özellikler Teorem 6: (Hirsh-Smale-Devaney,>")







 sisteminin sabit çözümleri, sistemin denge noktalarıdır. nasıl belirlenir? Cebrik denkleminin.>")
