Sunuyu indir
1
SERBESTLİK DERECESİ VE MECBURİ HAREKETLİLİK
Bir mekanizmanın SD’ si, mekanizmanın hareketli uzuvlarının sabit uzva göre konumlarını tamamen belirli bir şekilde tayin edebilmek için gerekli birbirinden bağımsız parametre sayısıdır. Kinematik zincirleri SD’lerine göre iki gruba ayırabiliriz : 1. Tek SD’ li KZ.’ler (Mecburi hareketli) 2. Çok SD’ li KZ’ ler. Mekanizmanın SD’ si 1 ise, hareketli uzuvlara ait noktaların yörüngeleri tamamen belirlidir. Bu yüzden böyle mekanizmalara Mecburi Hareketli Mekanizmalar denir.
 2. Çok SD’ li KZ’ ler. Mekanizmanın SD’ si 1 ise, hareketli uzuvlara ait noktaların yörüngeleri tamamen belirlidir. Bu yüzden böyle mekanizmalara Mecburi Hareketli Mekanizmalar denir.")
2
Buna karşılık çok SD’ li KZ’ lerde, uzuvlarda birbirine göre hareket söz konusu ise, birbirinden bağımsız olarak verilebilen parametrelerin seçiliş ve zamanla değiştirilme şekline göre, hareketli uzuvlara ait noktalar düzlemde çeşitli yörüngeler çizebilir. Bu yörüngeler önceden belirli değillerdir. F=1 → Mecburi Hareketli F≥ 2 → Birden Fazla SD’li n: Uzuv sayısı olmak üzere KZ’ in uzuvlar toplamı sayısı n= 𝑛 𝑛 3 +………….+ 𝑛 𝑘 = 𝑖=2 𝑘 𝑛 𝑖 Burada 𝑛 2 =2’ li uzuvların sayısı 𝑛 3 =3’ lü ‘’ ‘’ 𝑛 𝑘 =k’ lı ‘’ ‘’

3
λ : Cisimlerin konumlarını belirleyebilmek için gerekli parametre sayısı ise
λ=3 ( Düzlemsel mekanizmalarda ) λ=6 (Uzaysal mekanizmalarda ) ( n-1 ) hareketli uzuv varsa ; λ.( n-1) Toplam serbestlik derecesini verir. Yani bu ifade ile bağların pozisyonunu belirlemek için gerekli parametre sayısı bulunabilir. 𝑓 𝑖 = Her bir mafsalın veya eleman çiftinin SD’ si e = Eleman çifti sayısı 𝑖=1 𝑒 ( λ- 𝑓 𝑖 )= Mafsallarla (bağlarla) bağlı olmaktan dolayı ortaya çıkan toplam rijitlik sayısı =λ.e- 𝑖=1 𝑒 𝑓 𝑖 Bu durumda ; SD = (Toplam SD ) – (Toplam rijitlik) F= λ(n-1) – (λ.e - 𝑖=1 𝑒 𝑓 𝑖 ) veya
 λ=6 (Uzaysal mekanizmalarda ) ( n-1 ) hareketli uzuv varsa ; λ.( n-1) Toplam serbestlik derecesini verir. Yani bu ifade ile bağların pozisyonunu belirlemek için gerekli parametre sayısı bulunabilir. 𝑓 𝑖 = Her bir mafsalın veya eleman çiftinin SD’ si. e = Eleman çifti sayısı. 𝑖=1 𝑒 ( λ- 𝑓 𝑖 )= Mafsallarla (bağlarla) bağlı olmaktan dolayı ortaya çıkan toplam rijitlik sayısı =λ.e- 𝑖=1 𝑒 𝑓 𝑖. Bu durumda ; SD = (Toplam SD ) – (Toplam rijitlik) F= λ(n-1) – (λ.e - 𝑖=1 𝑒 𝑓 𝑖 ) veya.")
4
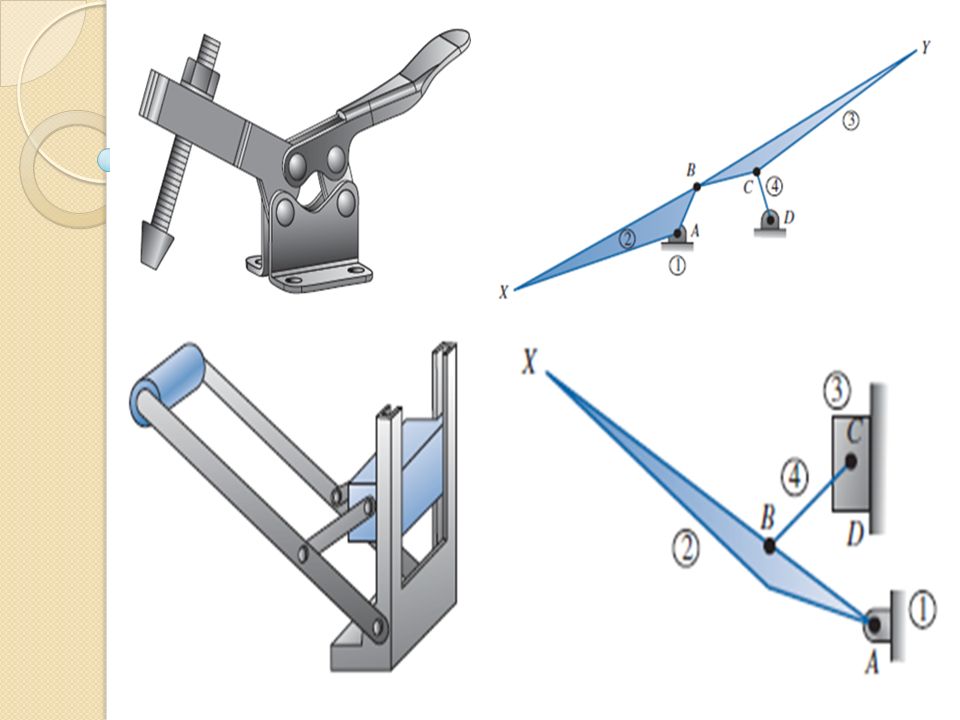
F= λ(n-e-1 ) + 𝑖=1 𝑒 𝑓 𝑖 λ=3, n=4, e=4 , 𝑖=1 𝑒 𝑓 𝑖 =4
Bu denkleme Genel SD Denklemi denir. Bu denklem bir çok mekanizmaya uygulanabilmekle beraber bazı hallerde kullanılamamaktadır. Yani mekanizmanın SD’i , genel SD denklemine uymayabilir. λ=3, n=4, e=4 , 𝑖=1 𝑒 𝑓 𝑖 =4 F=3(4-4-1)+4=1
+4=1.")
5
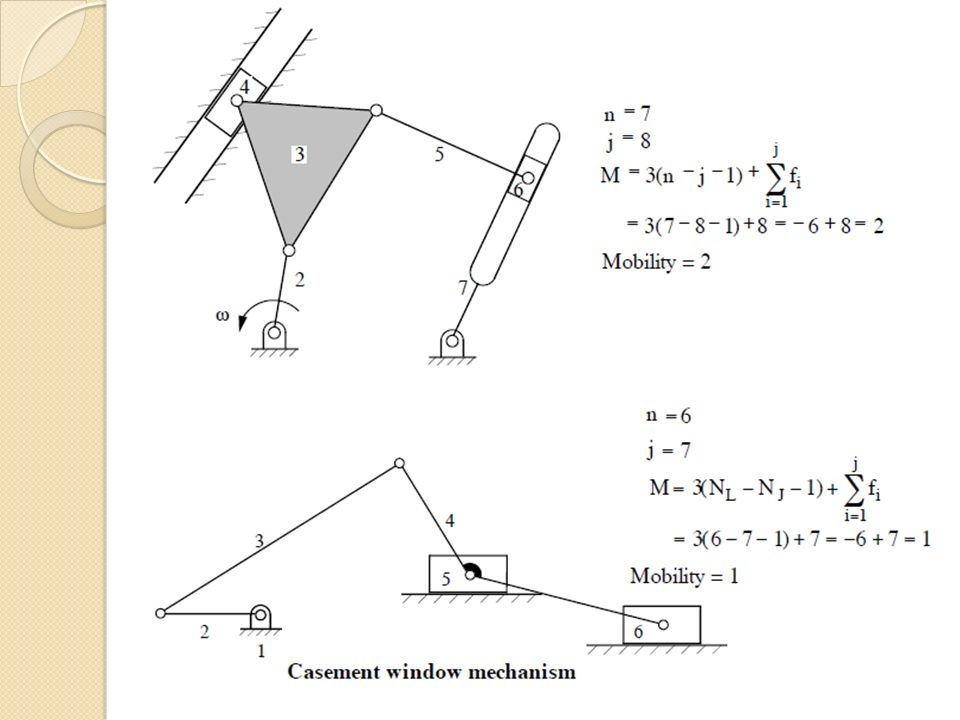
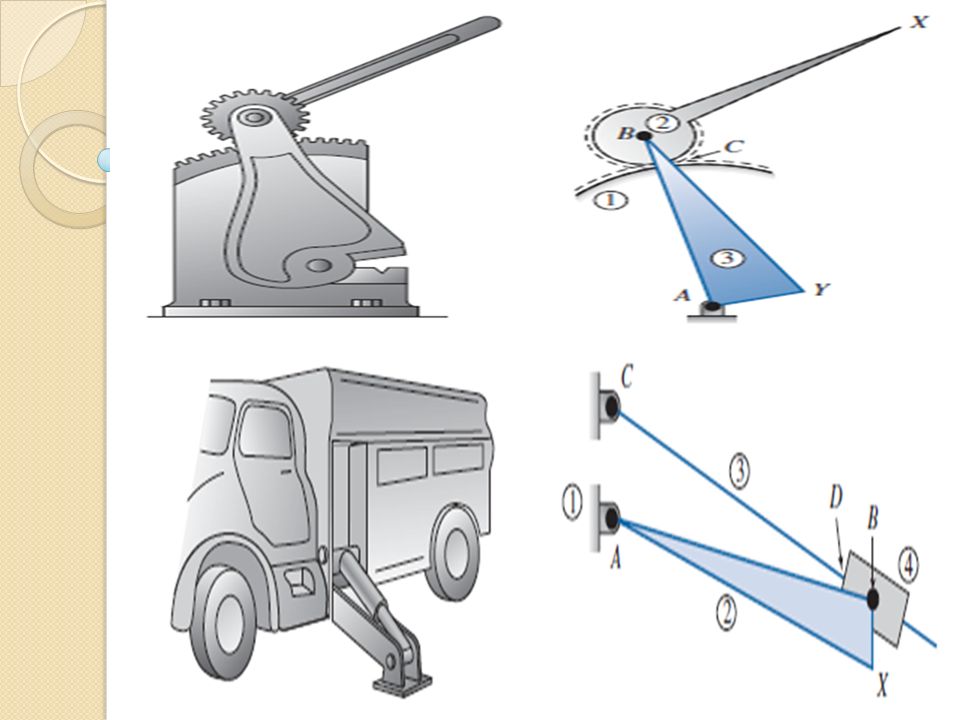
ÖR: Dört kol mekanizması n=4, e=4,, λ=3 𝑓 𝑖 =1→ 𝑖=1 𝑒 𝑓 𝑖 =4 F=1
𝑓 𝑖 =1→ 𝑖=1 𝑒 𝑓 𝑖 =4 F=1

6
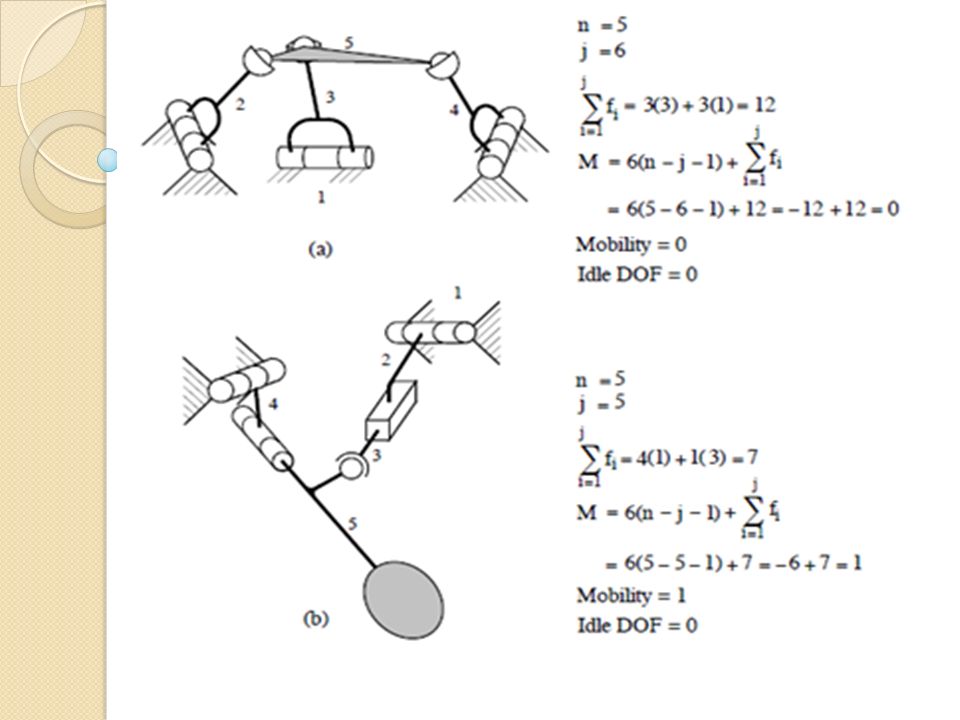
ÖR: Uzaysal 4 kol mekanizması
n=4, e=4 Kayar bağlar için 𝑓 𝑖 =1 Küresel bağlar için 𝑓 𝑖 =3 𝑓 𝑖 = λ=6 F=6(4-4-1)+8=2 F= 2
+8=2. F= 2.")
7
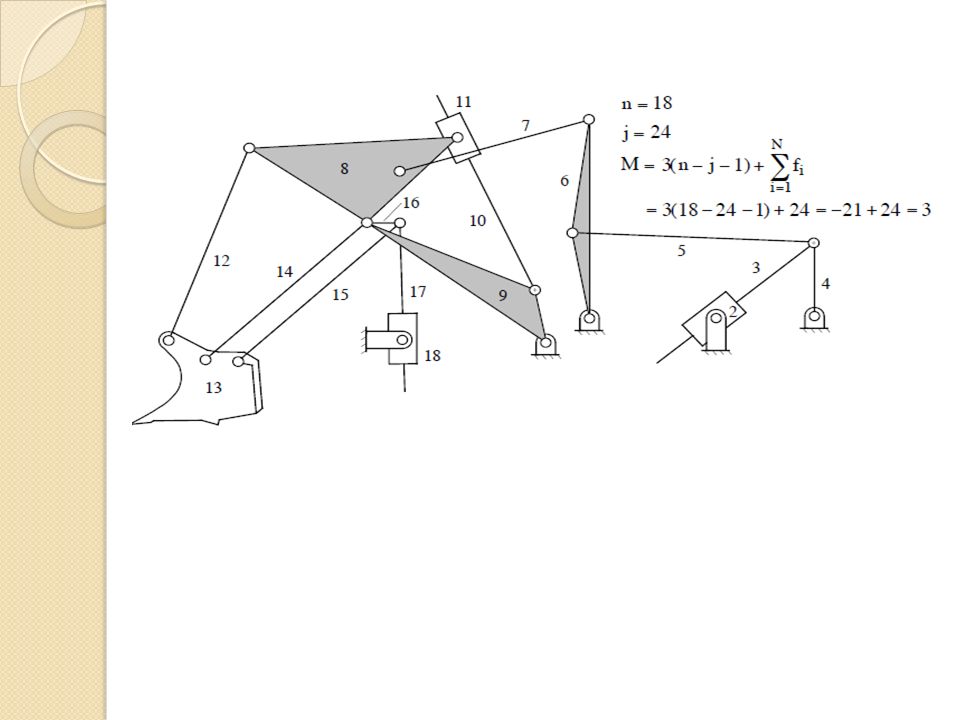
Genel SD denklemi→ F= λ(n-e-1)+ 𝑓 𝑖 idi. λ=3, n=8, e= 𝑒 1 =9, 𝑓 𝑖 =9 F=3(8-9-1)+9 = = 33-30 = 3

10
ÖZEL HALLER Sistemin hiçbir uzvu, hareket doğrultuları birbirine paralel olan kayar çiftlere sahip olmamalıdır. 2. Yalnız kayar çiftlere sahip ikili uzuvlar doğrudan doğruya birbirlerine bağlı olmamalıdır. Burada 4 uzvu hareket ettirilince 3 uzvu onun hareketine izin verir. Ancak diğer uzuvların hareketine gerek kalmadan 4 ve 3 hareketi sağlayabilir.

11
3.Hiçbir kapalı uzuv grubunda ikiden az döner çift bulunmamalıdır.
Şekilde uzuvları bağlantısında sadece 34 döner çifti mevcuttur. 1’ e hareket verdiğimizde 2 hareket etmez. 4. 3 uzuvlu bir grup, tek uzuv olarak ele alınmalıdır. Ancak üçlü uzuv grubu kayar çift ihtiva ediyorsa olmaz.

12
Mecburi Hareketlilik F= 3n-2 𝑒 1 -3
Mekanizma düzlemsel ve bir SD’ li adi eleman çiftlerinden oluşmuşsa 𝑖=1 𝑒 𝑓 𝑖 = 𝑒 olacaktır. ( 𝑒 1 = AEÇ sayısı ) Bu durumda SD : F= 3(n- 𝑒 1 -1)+ 𝑒 1 =3n-3 𝑒 𝑒 1 F= 3n-2 𝑒 1 -3 elde edilir. Bu denklem düzlemsel ve sadece AEÇ içeren mekanizmaların SD’ ini vermektedir. Düzlemsel mekanizmalarda, eleman çiftlerinin herbiri 1 SD’lidir. Bu bağıntıdan SD’ nin yalnızca uzuv ve eleman çiftlerinin sayısına bağlı olduğunu; buna karşılık uzuv ölçülerinden bağımsız olduğu görülmektedir.
 Bu durumda SD : F= 3(n- 𝑒 1 -1)+ 𝑒 1 =3n-3 𝑒 𝑒 1. F= 3n-2 𝑒 elde edilir. Bu denklem düzlemsel ve sadece AEÇ içeren mekanizmaların SD’ ini vermektedir. Düzlemsel mekanizmalarda, eleman çiftlerinin herbiri 1 SD’lidir. Bu bağıntıdan SD’ nin yalnızca uzuv ve eleman çiftlerinin sayısına bağlı olduğunu; buna karşılık uzuv ölçülerinden bağımsız olduğu görülmektedir.")
13
Bu denklemde F=1 konulursa, bir kinematik zincirin veya mekanizmanın mecburi hareketli olması için uzuv sayısı ve eleman çifti sayısı arasında bulunması gerekli bağıntı elde edilir. 1=3n-2 𝑒 eşitliğinden 2 𝑒 1 −3n+4=0 veya 3n-2 𝑒 1 -4= Bu bağıntıya GRÜBLER MECBURİ HAREKETLİLİK KRİTERİ denir. Mecburi Hareketli KZ’ lerde Bazı Sonuçlar : 1. 𝑒 1 =(3/2).n – 2 Mecburi hareketli bir mekanizmada uzuv sayısı(n) çift sayı olmalıdır. 2. İkili uzuvların sayısı üçlü uzuvların sayısından bağımsızdır ve ikili uzuv sayısı 𝑛 2 ≥4 olmalıdır. 3. i ≤ 𝑛 2 (i = 1, 2, 3, ………., k ) en fazla kaçlı uzuv (i) olduğu belirlenebilir.
.n – 2. Mecburi hareketli bir mekanizmada uzuv sayısı(n) çift sayı olmalıdır. 2. İkili uzuvların sayısı üçlü uzuvların sayısından bağımsızdır ve ikili uzuv sayısı 𝑛 2 ≥4 olmalıdır. 3. i ≤ 𝑛 2 (i = 1, 2, 3, ………., k ) en fazla kaçlı uzuv (i) olduğu belirlenebilir.")
14
3n-2 𝑒 1 -4= – 4 = 0 – 4 = 0

15
Yüksek Eleman Çiftlerinin Bulunması Halinde SD Tayini
𝑒 2 =YEÇ sayısı n’ =Eşdeğer uzuv sayısı e’ =Eşdeğer EÇ sayısı n’=n+ 𝑒 2 e’= 𝑒 1 +2 𝑒 2 olur. Bu durumda SD : F=3n’-2e’-3 F=3(n+ 𝑒 2 )-2( 𝑒 1 +2 𝑒 2 )-3 F=3n+3 𝑒 2 -2 𝑒 1 -4 𝑒 2 -3 F=3n-(2 𝑒 1 + 𝑒 2 )-3 F =1 için n- (2 𝑒 1 + 𝑒 2 ) - 4=0 Mekanizmada YEÇ bulunması halinde Grübler Kriteri
-2( 𝑒 1 +2 𝑒 2 )-3. F=3n+3 𝑒 2 -2 𝑒 1 -4 𝑒 F=3n-(2 𝑒 1 + 𝑒 2 )-3. F =1 için 3n- (2 𝑒 1 + 𝑒 2 ) - 4=0. Mekanizmada YEÇ bulunması halinde Grübler Kriteri.")
16
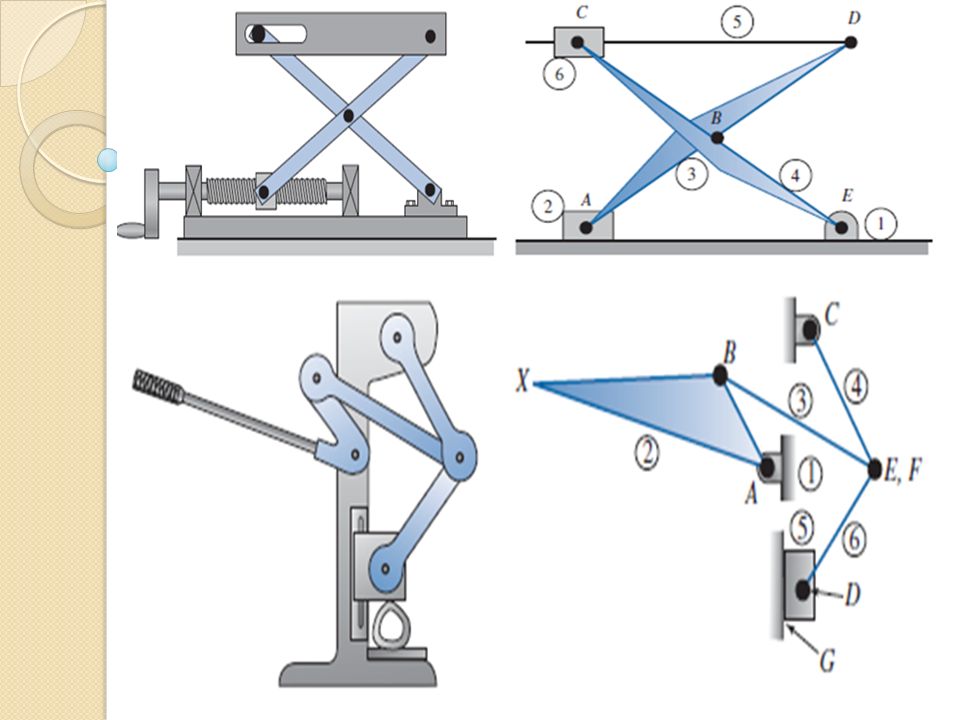
ÖR: Et kıyma makinası n=5, 𝑒1=5, 𝑒2=1 F=3n-(2𝑒1+𝑒2)-3 = 3.5-(2.5+1)-3
= =1 F=1 Mecburi hareketli n 2e 1 12, [14], 15 2 21, 23 3 32, 34 4 [41], 43, 45 5 54, 51 3n- (2 𝑒 1 + 𝑒 2 ) - 4=0 3.5 - (2.5+1) - 4=0
 - 4= (2.5+1) - 4=0.")
17
İdentik ( Tesirsiz ) Serbestlik Derecesi
Hareketin kinematiğine herhangi bir etkisi olmayan SD’ne, Tesirsiz SD denir, ve 𝑓 𝑡 ile gösterilir. ÖR: Mecburi hareketlilik söz konusu olduğuna göre şekildeki mekanizmayı tesirsiz SD’ ni dikkate almadan incelersek n=4, 𝑒 1 =3, 𝑒 2 =1 F=3n- (2 𝑒 1 + 𝑒 2 )-3 =3.4-(2.3+1)-3=12-7-3= 2 n 2e 1 12, ( 𝑛 2 ) 2 21, [23] ( 𝑛 2 ) 3 [32], ( 𝑛 2 ) 4 43, ( 𝑛 2 )
-3. =3.4-(2.3+1)-3=12-7-3= 2. n. 2e , 14 ( 𝑛 2 ) 2. 21, [23] ( 𝑛 2 ) 3. [32], 34 ( 𝑛 2 ) 4. 43,41 ( 𝑛 2 )")
18
F=3n- (2 𝑒 1 + 𝑒 2 )-3- 𝑓 𝑡 =3.4-(2.3+1)-3-1=12-7-3-1
Yani, sistem mecburi hareketli olduğu halde, mecburi hareketli değilmiş gibi bir sonuç çıkmaktadır. Bunun için tesirsiz SD dikkate alınmalıdır. Burada 3 uzvu sadece sürtünmeyi azaltmak için kullanılmıştır, ve mekanizma yandaki gibi kabul edilebilir. Ki bu durumda : n=3, 𝑒 1 =2, 𝑒 2 =1→ F=3n- (2 𝑒 1 + 𝑒 2 )-3 F=3.3-(2.2+1)-3 = 1 → Mekanizma mecburi hareketli bulunur. Bu durumda 𝑓 𝑡 =1 olup ilk şekil için F=3n- (2 𝑒 1 + 𝑒 2 ) 𝑓 𝑡 =3.4-(2.3+1)-3-1= yazılırsa F=1 elde edilecektir.
-3. F=3.3-(2.2+1)-3 = 1 → Mekanizma mecburi. hareketli bulunur. Bu durumda 𝑓 𝑡 =1 olup ilk şekil için. F=3n- (2 𝑒 1 + 𝑒 2 )-3- 𝑓 𝑡 =3.4-(2.3+1)-3-1= yazılırsa F=1 elde edilecektir.")
19
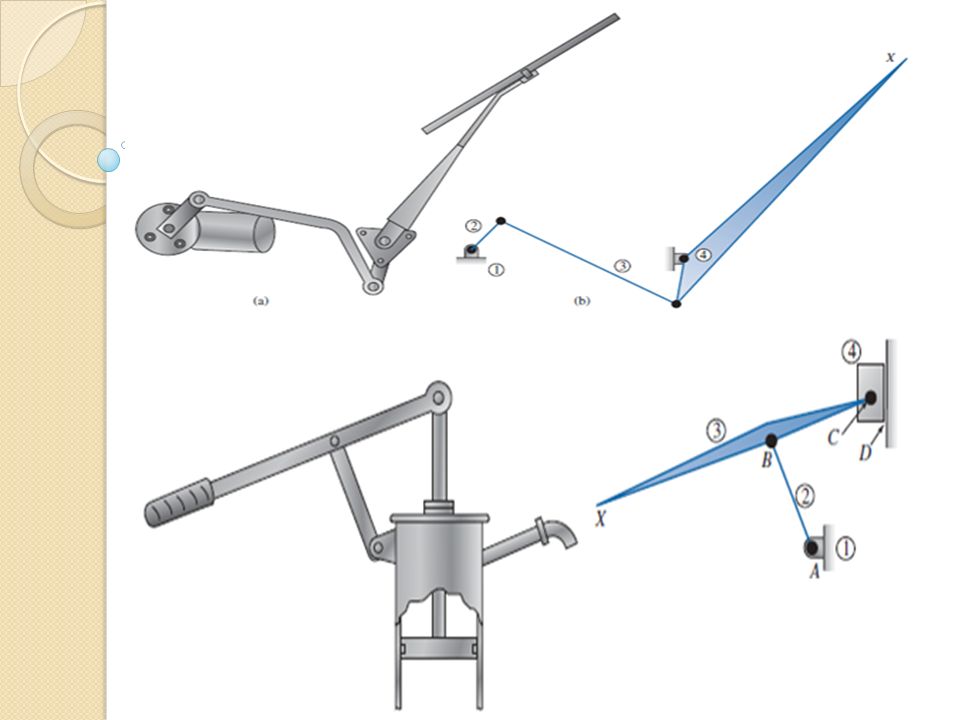
. Mekanizmanın SD sini bulun

20
Pasif Bağ Mekanizmada mecburi hareketliliğin sağlanmasında herhangi bir etkisi olmamasına rağmen mevcut olan uzva pasif bağ denir. s→ pasif bağ sayısı ise F=3n- (2 𝑒 1 + 𝑒 2 )-3- 𝑓 𝑡 +s
-3- 𝑓 𝑡 +s.")
21
ÖR: Şekildeki mekanizmada
𝑒 1 =6 olduğuna göre F=3n-2 𝑒 1 -3 = =0 bulunur. Ancak şekildeki mekanizma hareketlidir. 2 uzvuna hareket verildiğinde 3, 4 ve 5 uzuvları da hareket eder. Keza 4 veya 5 uzuvlarından bir tanesi mekanizmadan çıkarılmış olsa, kalan uzuvlar yine aynı hareketi yapacaktır. Yani uzuvlardan 1 tanesi gereksiz (pasif) tir. Buna göre F=3n-(2 𝑒 1 + 𝑒 2 )-3- 𝑓 𝑡 +s formülünü uygularsak; 𝑓 𝑡 =0 , s=1 , 𝑒 2 =0 olmak üzere F=3.5-(2.6+0) → F=1 bulunur. Çözümde alternatif olarak pasif bağ göz önüne alınmayıp n=n-1 alınarak ta çözüm yapılabilir.
 tir. Buna göre F=3n-(2 𝑒 1 + 𝑒 2 )-3- 𝑓 𝑡 +s formülünü uygularsak; 𝑓 𝑡 =0 , s=1 , 𝑒 2 =0 olmak üzere. F=3.5-(2.6+0) → F=1. bulunur. Çözümde alternatif olarak pasif bağ göz önüne alınmayıp n=n-1 alınarak ta çözüm yapılabilir.")
22
Katlı Mafsal Bir mekanizmada ikiden fazla uzuv bir mafsala bağlanırsa Katlı Mafsal söz konusu olur. Herhangi bir mafsala bağlanan k tane uzuv varsa, mafsala (k-1) katlı mafsal denir. Şekilde uzuvlarının birleştiği noktada katlı mafsal söz konusudur. Çözüm, mekanizmada katlı mafsal ortadan kaldırılarak, mesela aşağıdaki gibi yapılır.
 katlı mafsal denir. Şekilde uzuvlarının. birleştiği noktada katlı mafsal. söz konusudur. Çözüm, mekanizmada katlı mafsal ortadan. kaldırılarak, mesela aşağıdaki gibi yapılır.")
23
veya Yani KZ çizilirken yukarıdaki ihtimallerden biri dikkate alınarak çözüm yapılır.

25
Özel Haller 1= F=0 olabilir Genel SD denklemini yazarsak
F= λ(n-e-1) + 𝑓 𝑖 =3(9-12-1)+12 = =0 Böyle bir yapı söz konusu ise Statik Yapı söz konusudur. ∑M =0 , 𝐹 𝑥 =0 , 𝐹 𝑦 =0 ile çözüm yapılır.
 + 𝑓 𝑖. =3(9-12-1)+12. = =0. Böyle bir yapı söz konusu ise Statik Yapı söz konusudur. ∑M =0 , 𝐹 𝑥 =0 , 𝐹 𝑦 =0 ile çözüm yapılır.")
26
formülü yardımıyla çözüm yapılır.
2- F=-1 , F=-2 olabilir. λ=3 , n=6 , e=8 , 𝑓 𝑖 =8 F=3(6-8-1)+8=26-27=-1 Bu durumda Hiperstatik Yapı var demektir. Mafsallarda elastik bir şekil değişimi söz konusudur. ∆L=F.L/E.A formülü yardımıyla çözüm yapılır.
+8=26-27=-1. Bu durumda Hiperstatik Yapı var demektir. Mafsallarda elastik bir şekil değişimi söz konusudur. ∆L=F.L/E.A. formülü yardımıyla çözüm yapılır.")
27
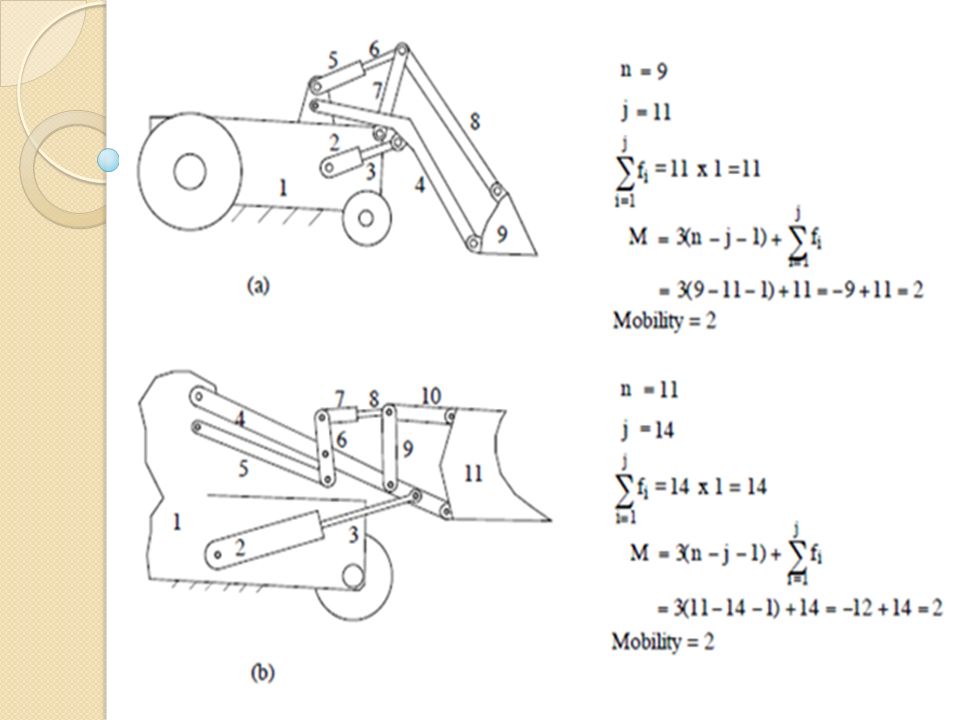
ÖRNEK PROBLEMLER n=6 , e=7 ÖR:
Burada 5 nolu uzuv şekilde 3’lü uzuv gibi görünse de aslında 2’li uzuvdur. Buna göre : F=3n-2e-3= =18-17=1 Mecburi Hareketli

28
Genel SD denklemi→ F= λ(n-e-1)+ 𝑓 𝑖 idi.
ÖR: n=8, e= 𝑒 1 =9, 𝑓 𝑖 =9 Genel SD denklemi→ F= λ(n-e-1)+ 𝑓 𝑖 idi. F=3(8-9-1)+9 = = = 3 n 2e 1 12, 15, 18 2 21, 23 3 32, 34, 36 4 43, 45 5 54, 51 6 63, 67 7 76, 78 8 87, 81
+ 𝑓 𝑖 idi. F=3(8-9-1)+9 = = = 3. n. 2e , 15, , , 34, , , , , , 81.")
29
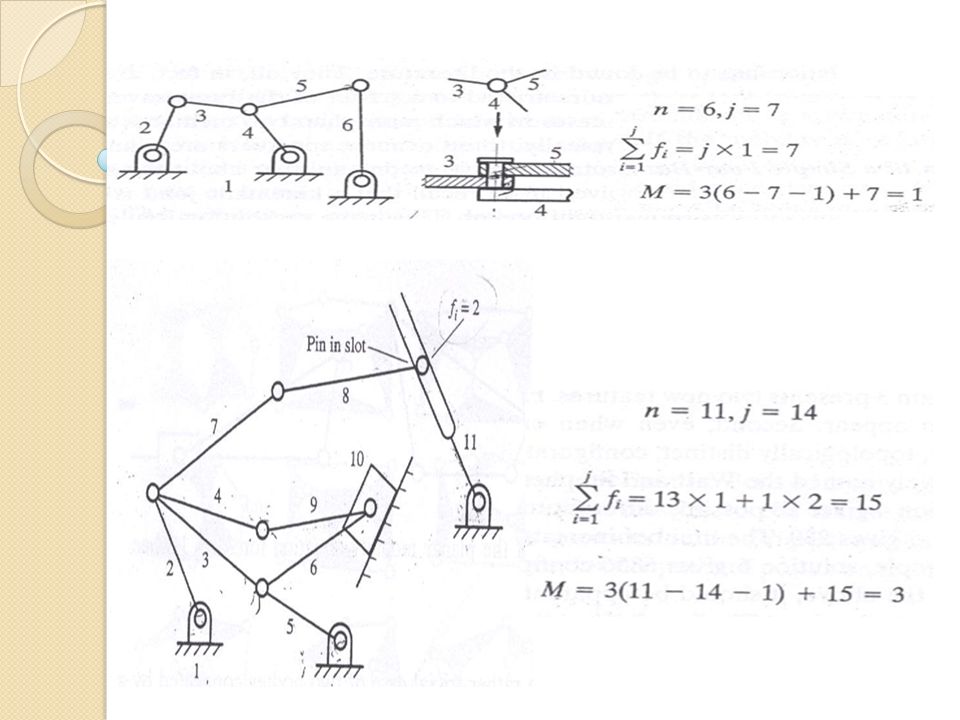
ÖR: n=7, e=9 F = 3n-2e-3 = 3.7-2.9-3 = 21-21= 0 SD → n=6, e=7
12, 17, 14, 16 ( 𝑛 4 ) 2 21, ( 𝑛 2 ) 3 32, 34, 35, 37 ( 𝑛 4 ) 4 43, ( 𝑛 2 ) 5 53, ( 𝑛 2 ) 6 61, ( 𝑛 2 ) 7 71, ( 𝑛 2 ) F = 3n-2e-3 = = 21-21= 0 Ancak bu mekanizma statik değildir. Burada PASİF BAĞ söz konusudur. 2 veya 4 nolu uzuv çıkarılırsa da sistem aynı hareketi yapacaktır. Bu durumda KZ → SD → n=6, e=7 F = = 8-17 = 1
 2. 21,23 ( 𝑛 2 ) 3. 32, 34, 35, 37 ( 𝑛 4 ) 4. 43, 41 ( 𝑛 2 ) 5. 53, 56 ( 𝑛 2 ) 6. 61, 65 ( 𝑛 2 ) 7. 71, 73 ( 𝑛 2 ) F = 3n-2e-3 = = 21-21= 0. Ancak bu mekanizma statik değildir. Burada PASİF BAĞ söz konusudur. 2 veya 4 nolu uzuv çıkarılırsa da sistem aynı. hareketi yapacaktır. Bu durumda KZ → SD → n=6, e=7. F = = 8-17 = 1.")
30
uzvun mekanizmanın çalışması üzerinde herhangi bir tesiri yoktur.
F=3n-(2 𝑒 1 + 𝑒 2 )-3 =3.7-(2.7+1)-3 =21-18 = F=3 Ancak burada da 7 nolu uzvun mekanizmanın çalışması üzerinde herhangi bir tesiri yoktur. Yani 𝑓 𝑡 =1 dir. Bu durumda F=3n - (2 𝑒 1 + 𝑒 2 ) -3- İfadesi gereğince F=3-1=2 olur. 𝑓 𝑡
-3. =3.7-(2.7+1)-3. =21-18 =3 F=3. Ancak burada da 7 nolu. uzvun mekanizmanın çalışması. üzerinde herhangi bir tesiri. yoktur. Yani 𝑓 𝑡 =1 dir. Bu durumda F=3n - (2 𝑒 1 + 𝑒 2 ) -3- İfadesi gereğince. F=3-1=2 olur. 𝑓 𝑡.")
32
SORU: Çözüm: SORU: SORU:

33
SORU: SORU: Dalga yapma mekanizması SORU:






















 = {P:|PF| = |PH| , Δ , F , P € Π } noktalarının kümesine parabol denir.>")