Sunuyu indir
1
İ.T.Ü. MAKİNA FAKÜLTESİ MAKİNA ELEMANLARI 2 2006-2007 BAHAR YARIYILI 5.01.2007 Hareket İletim Mekanizmaları Prof. Dr Hikmet Kocabaş İ.T.Ü. Makina Fak. Konstrüksiyon Anabilim Dalı ofis no: 428 ofis tel: 0212-2931300 / 2468 e-mail: kocabash@itu.edu.tr web site: www2.itu.edu.tr/~kocabash İlgi Alanları: Makina Tasarımı Sonlu Elemanlarla Analiz Mekanizma Simülasyonu CAD – CAE – CAM

2
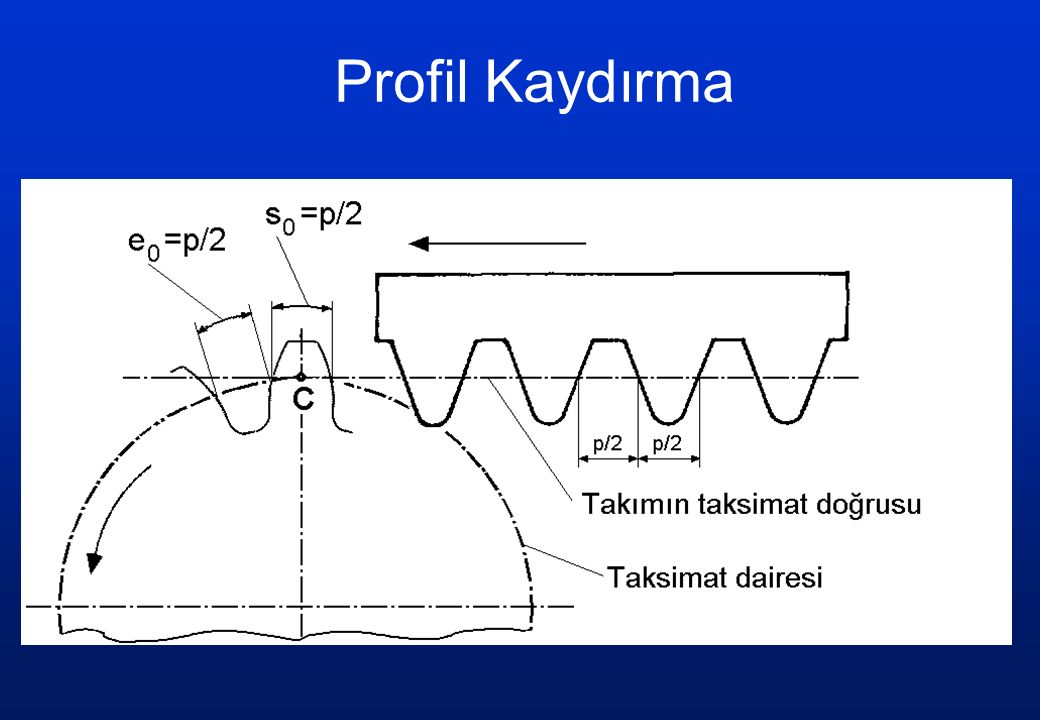
Profil kaydırma alt sınırı x = 1 – z 1 / (2/sin 2 ψ) ψ=20° için 2/sin 2 ψ = 17 x = (17 – z 1 ) / 17 Teorik x = (14 – z 1 ) / 14 pratik
 ψ=20° için 2/sin 2 ψ = 17 x = (17 – z 1 ) / 17 Teorik x = (14 – z 1 ) / 14 pratik")
3
profil kaydırma üst sınırı sivri tepe s y = 2 r y [ s/2r – (φ y – φ)] s y = 2 r y [ 1/z ( / 2 + 2 x tgψ) – (φ y – φ)] s y = 0 φ y = 1/z ( / 2 + 2 x tgψ) + φ r y = r cosψ / cosψ y = r t ’ = (m z / 2) cosψ / cosψ y r y = r + (1 + x) m = m (z / 2 + (1 + x)) = m (z / 2) cosψ / cosψ y (z / 2 + (1 + x)) = (z / 2) cosψ / cosψ y
![profil kaydırma üst sınırı sivri tepe s y = 2 r y [ s/2r – (φ y – φ)] s y = 2 r y [ 1/z ( / x tgψ) – (φ y – φ)] s y = 0 φ y = 1/z ( / x tgψ) + φ r y = r cosψ / cosψ y = r t ’ = (m z / 2) cosψ / cosψ y r y = r + (1 + x) m = m (z / 2 + (1 + x)) = m (z / 2) cosψ / cosψ y (z / 2 + (1 + x)) = (z / 2) cosψ / cosψ y](http://images.slideplayer.biz.tr/33/10187739/slides/slide_3.jpg "profil kaydırma üst sınırı sivri tepe s y = 2 r y [ s/2r – (φ y – φ)] s y = 2 r y [ 1/z ( / x tgψ) – (φ y – φ)] s y = 0 φ y = 1/z ( / x tgψ) + φ r y = r cosψ / cosψ y = r t ’ = (m z / 2) cosψ / cosψ y r y = r + (1 + x) m = m (z / 2 + (1 + x)) = m (z / 2) cosψ / cosψ y (z / 2 + (1 + x)) = (z / 2) cosψ / cosψ y")
4
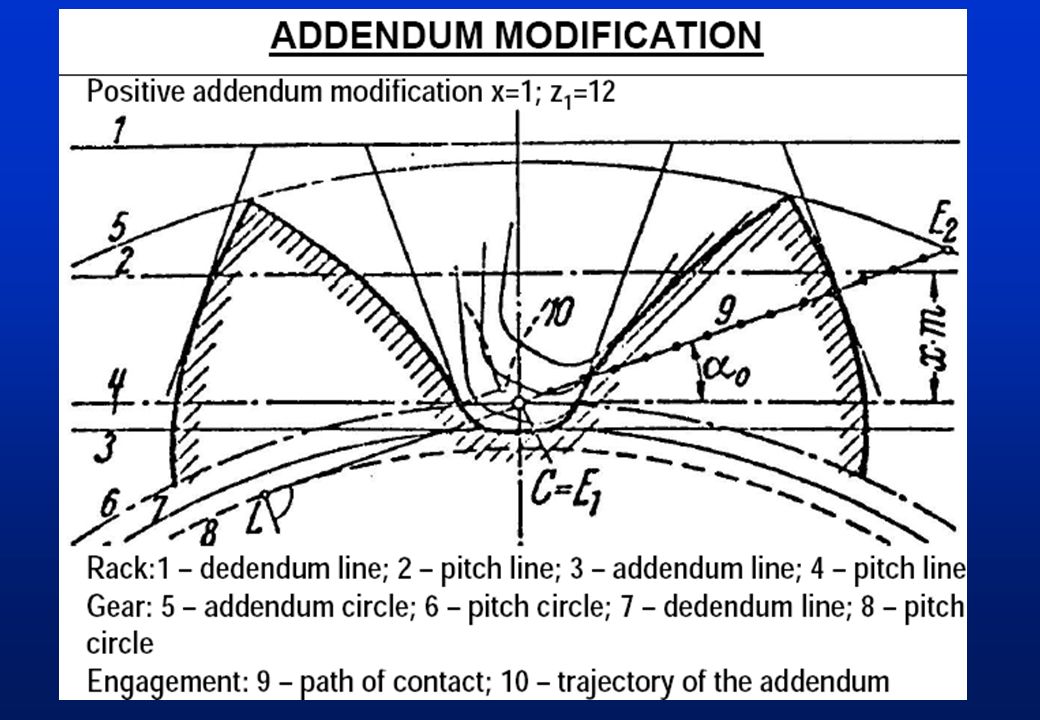
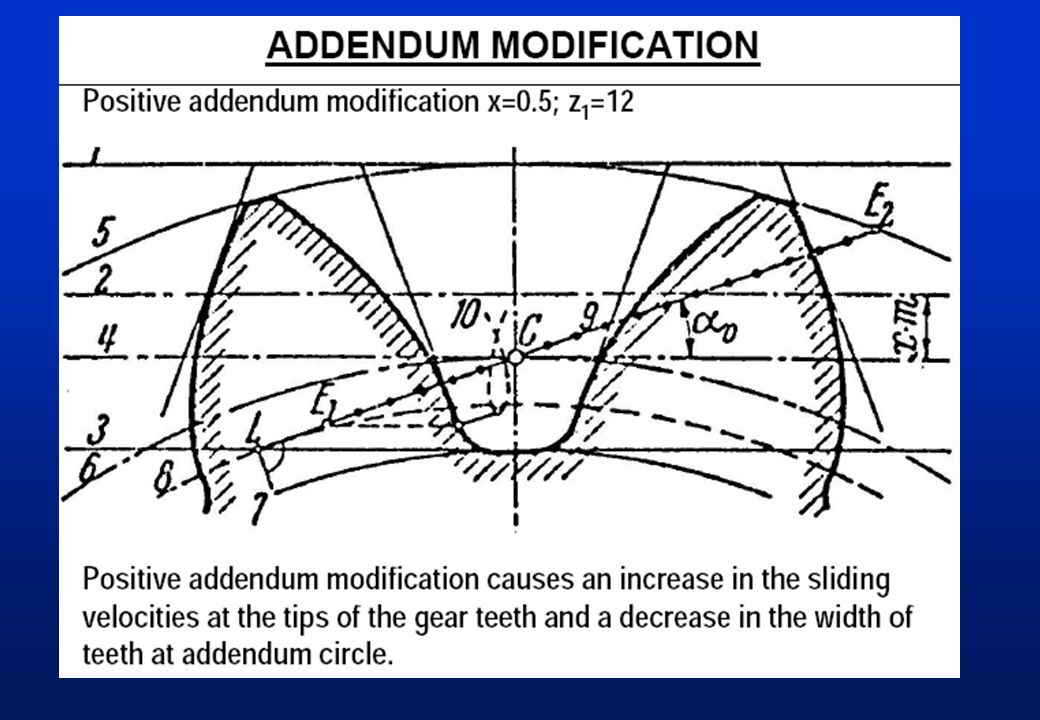
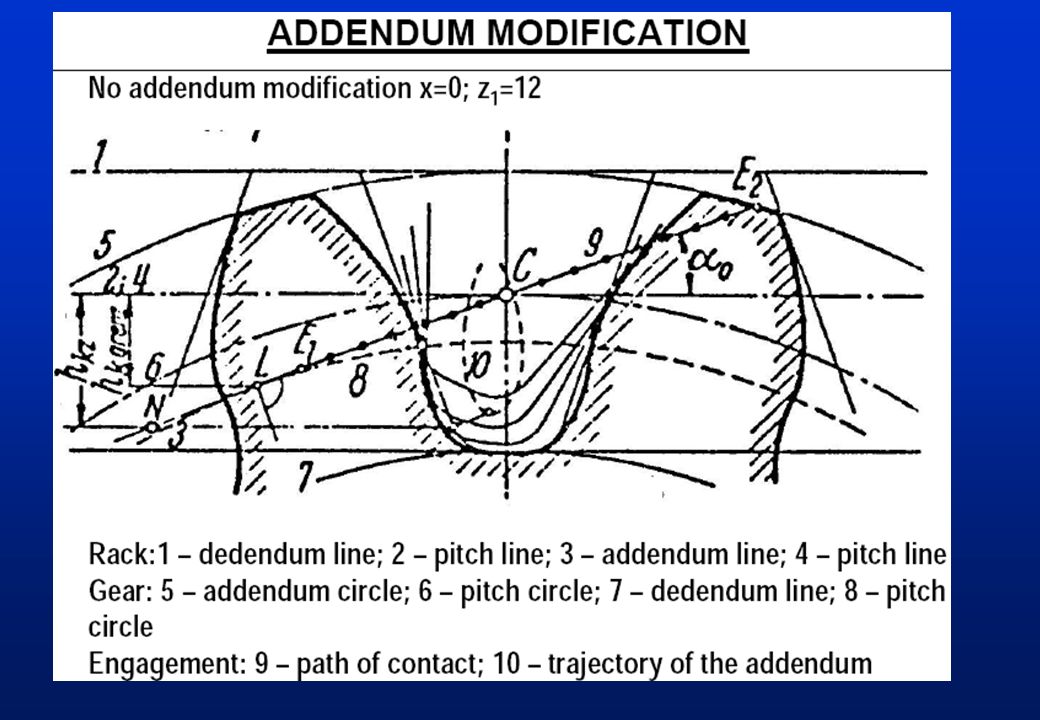
Profil kaydırma (Addendum Modification) Profil kaydırma faktörlerinin seçimine bağlı olarak, sıfır x 1 =0, x 2 =0, a v =a, V- Sıfır x 2 +x 1 =0, x 1 = -x 2 (sadece biri pozitif, a v =a) ve genel V-mekanizmaları x1≠x2 (x2-x1>0), sıfır dişliler, eş çalışma kavrama açısı, imalat kavrama açısından farklıdır.
 Profil kaydırma faktörlerinin seçimine bağlı olarak, sıfır x 1 =0, x 2 =0, a v =a, V- Sıfır x 2 +x 1 =0, x 1 = -x 2 (sadece biri pozitif, a v =a) ve genel V-mekanizmaları x1≠x2 (x2-x1>0), sıfır dişliler, eş çalışma kavrama açısı, imalat kavrama açısından farklıdır.")
5
V mekanizması Sıfır dişlisi x 1 = 0 x 2 = 0 a v = a r eş1 = r 1 r eş2 = r 2 ψ v = ψ V-Sıfır mekanizması x 2 = - x 1 a v = a r eş1 = r 1 r eş2 = r 2 ψ v = ψ

6
V mekanizması Eş çalışma kavrama açısı, imalat kavrama açısından farklıdır. Merkez mesafeleri de farklıdır. Eş çalışmayı aşağıdaki denklemler tayin eder. s eş1 = 2 r eş1 [ 1/z 1 ( / 2 + 2 x 1 tgψ) – (φ v – φ)] s eş2 = 2 r eş2 [ 1/z 2 ( / 2 + 2 x 2 tgψ) – (φ v – φ)]
 – (φ v – φ)] s eş2 = 2 r eş2 [ 1/z 2 ( / x 2 tgψ) – (φ v – φ)].")
7
V mekanizması 2 r eş1 = z 1 t eş / ve 2 r eş2 = z 2 t eş / s eş1 + s eş2 = t eş t eş = 2 r eş1 [ 1/z 1 ( / 2 + 2 x 1 tgψ) – (φ v – φ)] + 2 r eş2 [ 1/z 2 ( / 2 + 2 x 2 tgψ) – (φ v – φ)] t eş = (z 1 t eş / ) [1/z 1 ( /2 + 2 x 1 tgψ) – (φ v – φ)] + (z 2 t eş / ) [1/z 2 ( /2 + 2 x 2 tgψ) – (φ v – φ)]
![V mekanizması 2 r eş1 = z 1 t eş / ve 2 r eş2 = z 2 t eş / s eş1 + s eş2 = t eş t eş = 2 r eş1 [ 1/z 1 ( / x 1 tgψ) – (φ v – φ)] + 2 r eş2 [ 1/z 2 ( / x 2 tgψ) – (φ v – φ)] t eş = (z 1 t eş / ) [1/z 1 ( /2 + 2 x 1 tgψ) – (φ v – φ)] + (z 2 t eş / ) [1/z 2 ( /2 + 2 x 2 tgψ) – (φ v – φ)]](http://images.slideplayer.biz.tr/33/10187739/slides/slide_7.jpg "V mekanizması 2 r eş1 = z 1 t eş / ve 2 r eş2 = z 2 t eş / s eş1 + s eş2 = t eş t eş = 2 r eş1 [ 1/z 1 ( / x 1 tgψ) – (φ v – φ)] + 2 r eş2 [ 1/z 2 ( / x 2 tgψ) – (φ v – φ)] t eş = (z 1 t eş / ) [1/z 1 ( /2 + 2 x 1 tgψ) – (φ v – φ)] + (z 2 t eş / ) [1/z 2 ( /2 + 2 x 2 tgψ) – (φ v – φ)]")
8
V mekanizması t eş = (z 1 t eş / ) (1/z 1 ) ( / 2) + (z 1 t eş / ) (1/z 1 ) (2 x 1 tgψ) – (z 1 t eş / ) (φ v – φ) + (z 2 t eş / ) (1/z 2 ) ( / 2) + (z 2 t eş / ) (1/z 2 ) (2 x 2 tgψ) – (z 2 t eş / ) (φ v – φ) t eş = (t eş /2) + (t eş /2) + (t eş / ) 2 (x 1 + x 2 ) tgψ – (z 1 + z 2 ) (t eş / ) (φ v – φ)
 (1/z 1 ) ( / 2) + (z 1 t eş / ) (1/z 1 ) (2 x 1 tgψ) – (z 1 t eş / ) (φ v – φ) + (z 2 t eş / ) (1/z 2 ) ( / 2) + (z 2 t eş / ) (1/z 2 ) (2 x 2 tgψ) – (z 2 t eş / ) (φ v – φ) t eş = (t eş /2) + (t eş /2) + (t eş / ) 2 (x 1 + x 2 ) tgψ – (z 1 + z 2 ) (t eş / ) (φ v – φ)")
9
V mekanizması (z 1 + z 2 ) (t eş / ) (φ v – φ) = (t eş / ) 2 (x 1 + x 2 ) tgψ φ v = 2 [(x 1 +x 2 )/(z 1 +z 2 )] tgψ + φ x 1 +x 2 = (z 1 +z 2 ) (φ v – φ) / (2 tgψ) r eş1 = r 1 cosψ / cosψ v r eş2 = r 2 cosψ / cosψ v a v = (r 1 + r 2 ) cosψ / cosψ v
![V mekanizması (z 1 + z 2 ) (t eş / ) (φ v – φ) = (t eş / ) 2 (x 1 + x 2 ) tgψ φ v = 2 [(x 1 +x 2 )/(z 1 +z 2 )] tgψ + φ x 1 +x 2 = (z 1 +z 2 ) (φ v – φ) / (2 tgψ) r eş1 = r 1 cosψ / cosψ v r eş2 = r 2 cosψ / cosψ v a v = (r 1 + r 2 ) cosψ / cosψ v](http://images.slideplayer.biz.tr/33/10187739/slides/slide_9.jpg "V mekanizması (z 1 + z 2 ) (t eş / ) (φ v – φ) = (t eş / ) 2 (x 1 + x 2 ) tgψ φ v = 2 [(x 1 +x 2 )/(z 1 +z 2 )] tgψ + φ x 1 +x 2 = (z 1 +z 2 ) (φ v – φ) / (2 tgψ) r eş1 = r 1 cosψ / cosψ v r eş2 = r 2 cosψ / cosψ v a v = (r 1 + r 2 ) cosψ / cosψ v")
10
V mekanizması Mechanic.pdf chapter 39. GEARS http://claymore.engineer.gvsu.edu

11
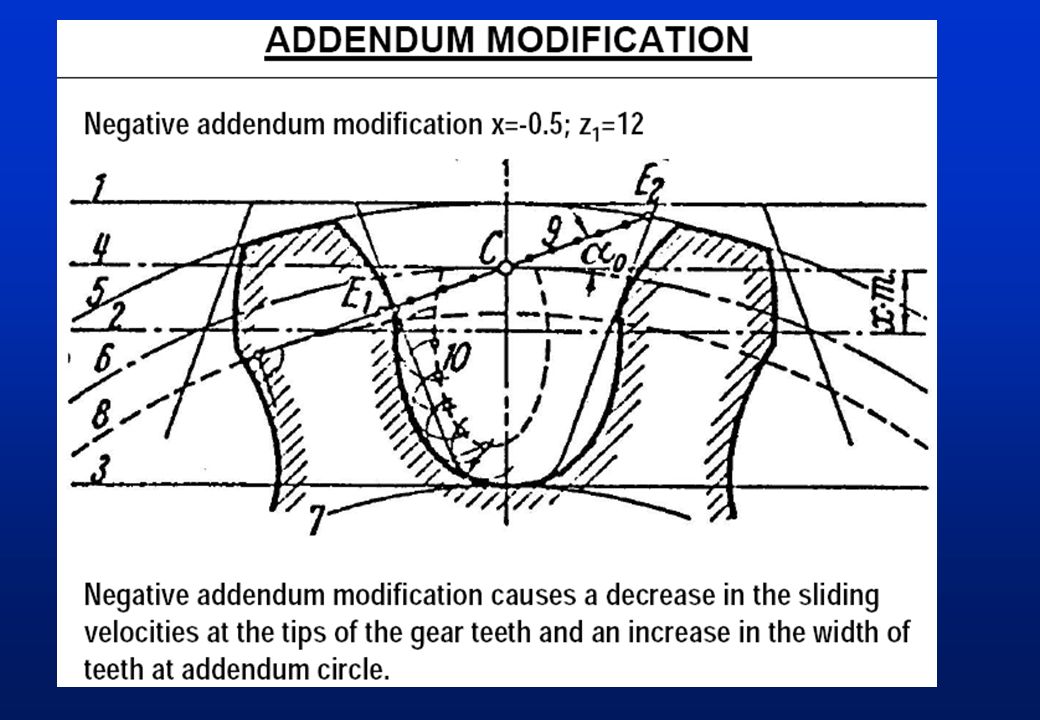
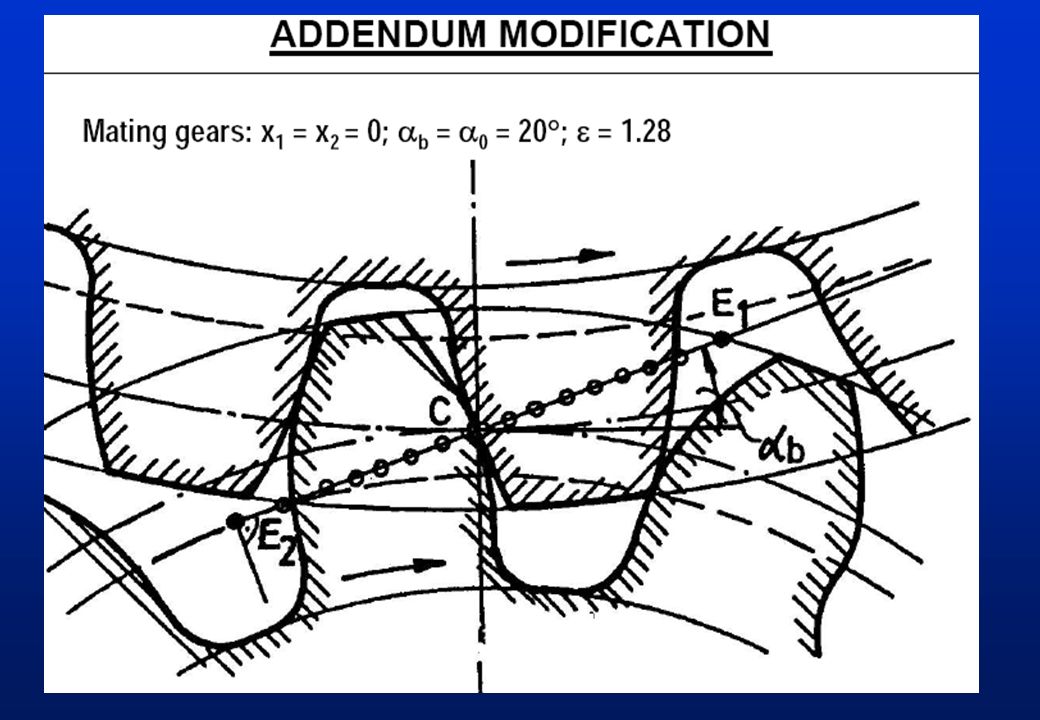
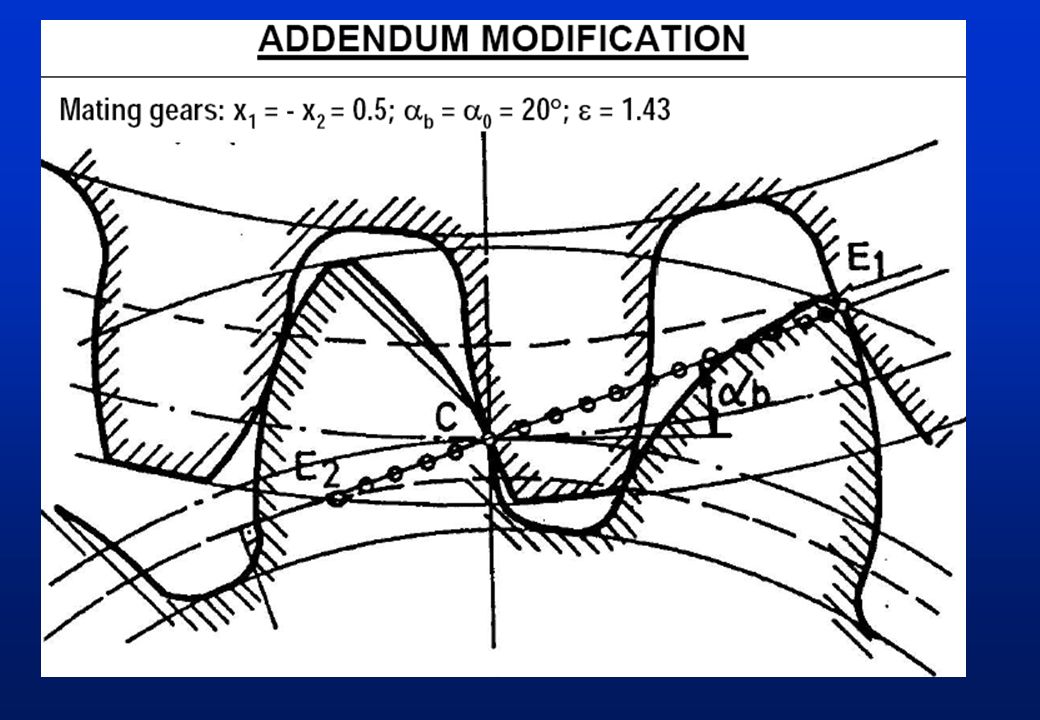
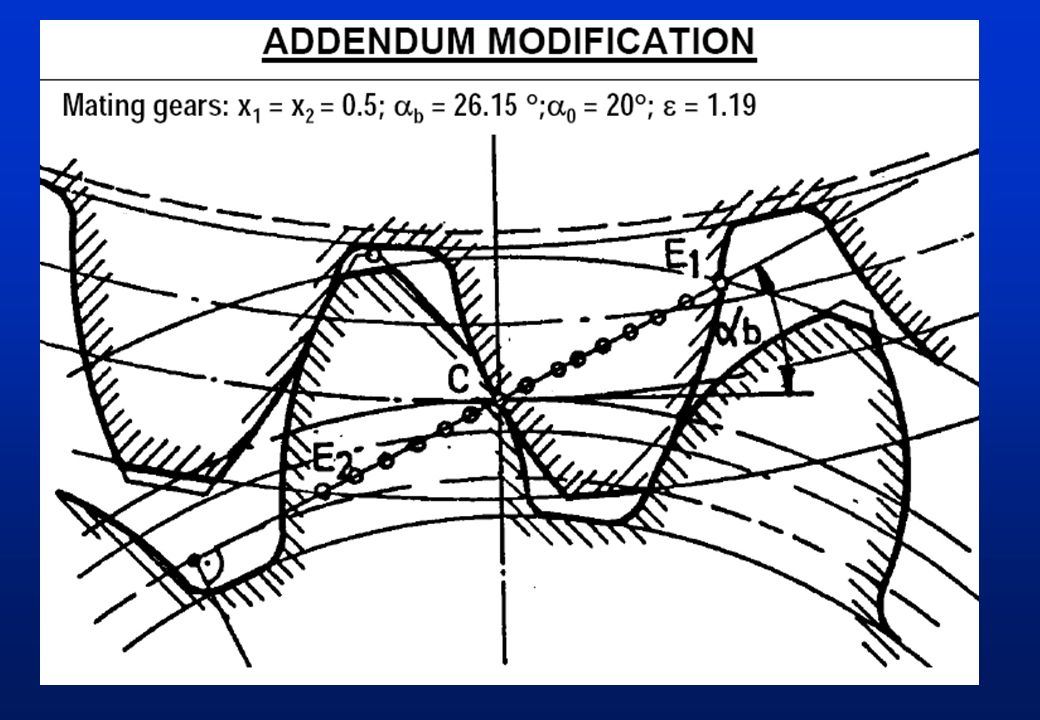
Profil Kaydırmanın Etkisi Kavrama Açısının Etkisi

12
Eş çalışan dişli boyutları Diş dibi yarıçapları: r d1 = r 1 – (m + s k ) + m x 1 r d2 = r 2 – (m + s k ) + m x 2 Diş başı yarıçapları: r t1 ’ = r 1 + m + m x 1 r t2 ’ = r 2 + m + m x 2
 + m x 1 r d2 = r 2 – (m + s k ) + m x 2 Diş başı yarıçapları: r t1 ’ = r 1 + m + m x 1 r t2 ’ = r 2 + m + m x 2")
13
s k diş boşluğunu sağlayan diş başı yarıçapları r t1 = a v – (r d2 + s k ) r t2 = a v – (r d1 + s k ) r t1 = a v – r 2 + m (1 – x 2 ) r t2 = a v – r 1 + m (1 – x 1 ) k m = r t1 ’ – r t1 = r t2 ’ – r t2 = m (x 1 + x 2 ) – (a v – a) dişlilerin uçlarında eş çalışmada boşluk için kısaltma oranı k = x 1 + x 2 – (a v – a) / m
 r t2 = a v – (r d1 + s k ) r t1 = a v – r 2 + m (1 – x 2 ) r t2 = a v – r 1 + m (1 – x 1 ) k m = r t1 ’ – r t1 = r t2 ’ – r t2 = m (x 1 + x 2 ) – (a v – a) dişlilerin uçlarında eş çalışmada boşluk için kısaltma oranı k = x 1 + x 2 – (a v – a) / m")
14
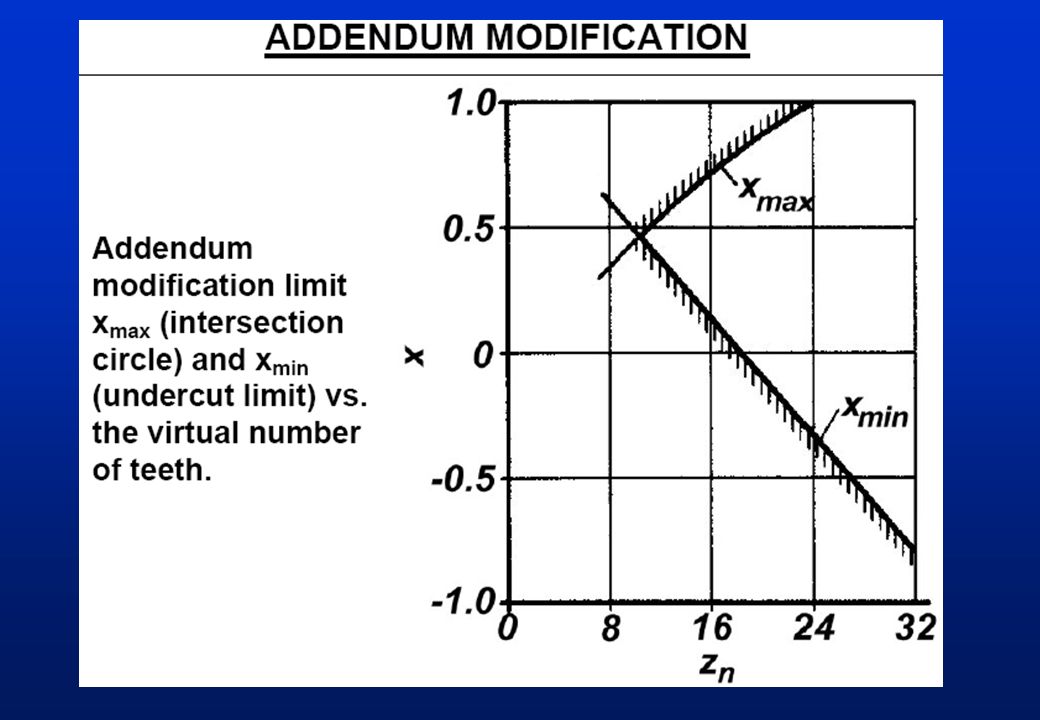
Profil kaydırma ve Alttan Kesme Profil Kaydırma

28
Asimetrik dişli ve çubuk bıçak

29
Ortosikloid Cardioid Nephroid Ranunculoid Episikloid Sikloid diş profili

30
Hiposikloid Epitrochoid Hypocycloid Hypotrochoid Sikloid diş profili

31
Episikloid ve Hiposikloid diş profili

32
Episikloid, Hiposikloid

33
Sikloid Sikloid, bir dairenin kendisinden büyük bir başka dairenin üzerinde yuvarlanması sırasında yuvarlanan dairenin üzerindeki bir noktanın çizdiği eğridir.

34
Wildhaber-Novikov diş geometrisine sahip dişliler

35
Novikov dişlerinde kavrama

36
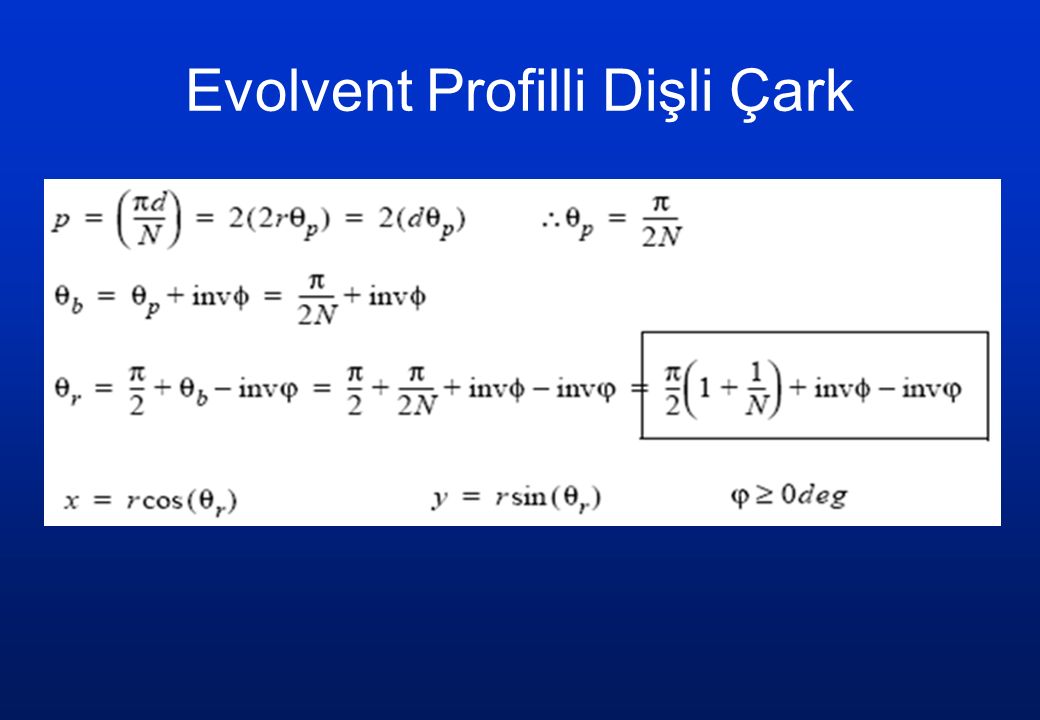
Evolvent Profilli Dişli Çark evolvent

37
Evolvent Profilli Dişli Çark

39
Epicycloid

40
The epicycloid was named by Ole Roemer in 1674. He discovered that cog-wheels with epicycloidal teeth turned with minimum friction. An epicycloid is defined to be: The path traced out by a point P on the edge of a Circle of Radius b rolling on the outside of a fixed Circle of Radius a.

41
Epicycloid Point P moves about circle of radius b: x = b cos Φ y = b sin Φ The axis P''C' also translates at the angle t with respect to its original place P'C as the Circle B travels counterclockwise about Circle A : x = b cos (Φ + t) y = b sin (Φ + t)
 y = b sin (Φ + t)")
42
Epicycloid The arc length traced by point P is equal to the distance Circle B has traveled about Circle A: s = a * t s' = b * Φ and, s = s' a * t = b * Φ f = (a/b)t
t")
43
Epicycloid so, replacing f in the equations: x = b cos [(a/b)t + t] = b cos {[(a + b)/b] t} y = b sin [(a/b)t + t] = b sin {[(a + b)/b] t} In addition the center of Circle B (the point, C) moves counterclockwise with respect to O by angle t, with a radius of (a + b). This is added to the above translation: x = (a + b) cos t + b cos {[(a + b)/b] t} y = (a + b) sin t + b sin {[(a + b)/b] t}
![Epicycloid so, replacing f in the equations: x = b cos [(a/b)t + t] = b cos {[(a + b)/b] t} y = b sin [(a/b)t + t] = b sin {[(a + b)/b] t} In addition the center of Circle B (the point, C) moves counterclockwise with respect to O by angle t, with a radius of (a + b).](http://images.slideplayer.biz.tr/33/10187739/slides/slide_43.jpg "This is added to the above translation: x = (a + b) cos t + b cos {[(a + b)/b] t} y = (a + b) sin t + b sin {[(a + b)/b] t}.")
44
Minimum diş sayısı ile dişli çifti a) z 1 = 5, z 2 = 5 α w =33.1 ε α = 1.04 b) z 1 = 4 z 2 = 6 α w = 32.6 ε α = 1.02 c) z 1 = 3 z 2 = 11 α w = 24.3 ε α = 1.01
 z 1 = 5, z 2 = 5 α w =33.1 ε α = 1.04 b) z 1 = 4 z 2 = 6 α w = 32.6 ε α = 1.02 c) z 1 = 3 z 2 = 11 α w = 24.3 ε α = 1.01")
45
Bir dişe sahip helisel dişli (Helical gears with one tooth)
")
46
Asimetrik dişli mekanizması Yüksek kavrama açılı dişli mekanizması

47
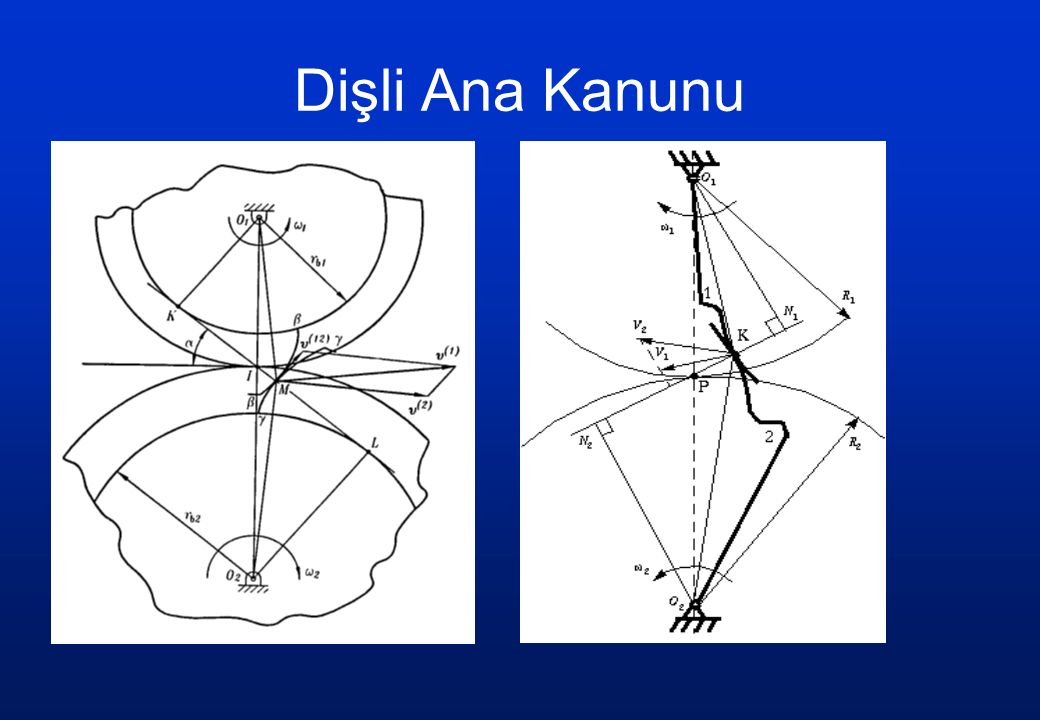
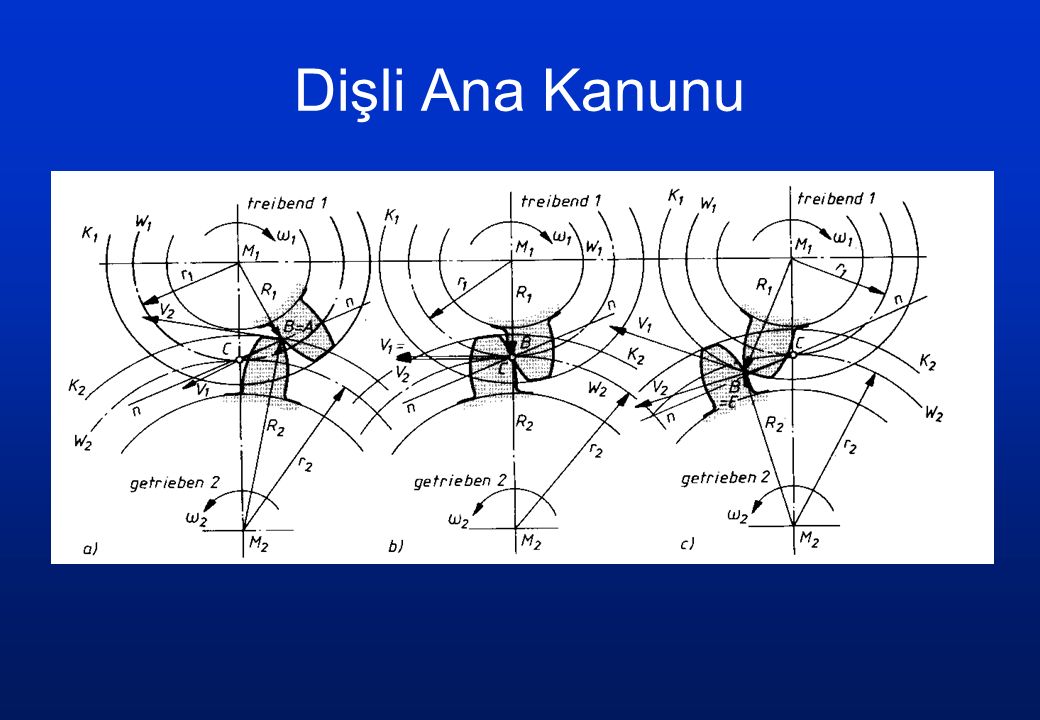
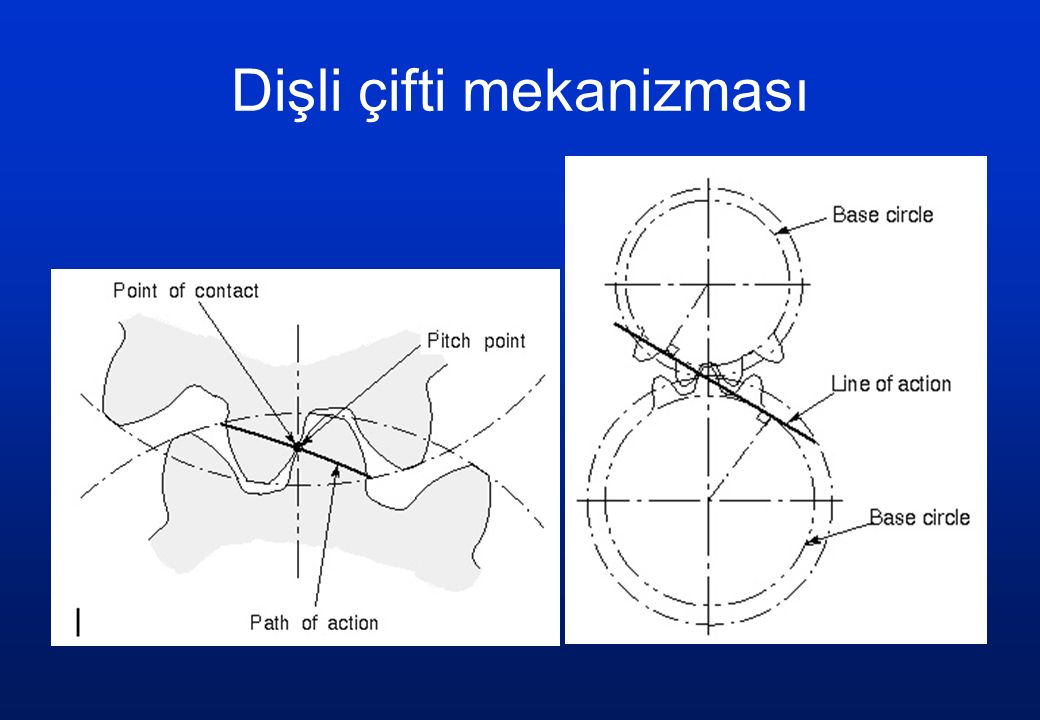
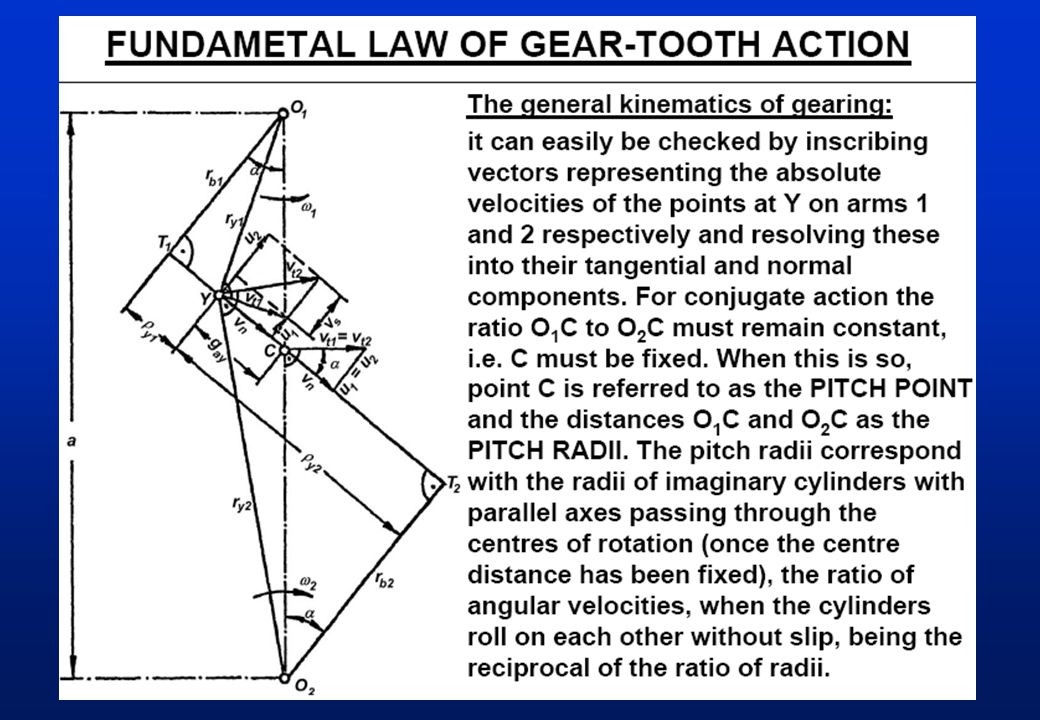
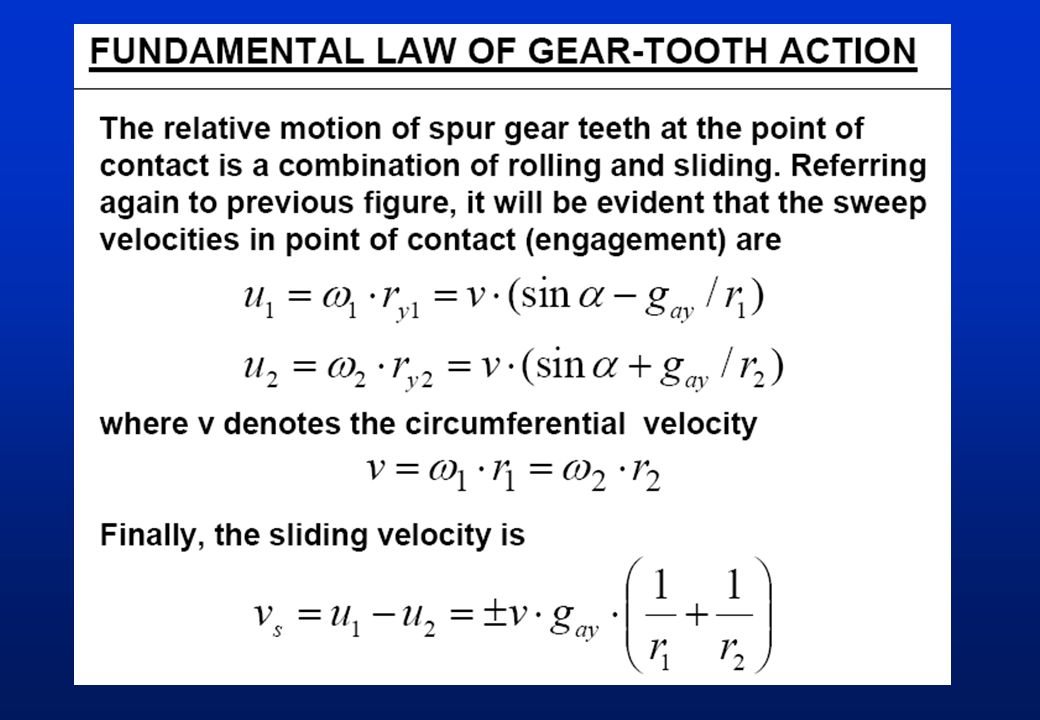
İki yuvarlanma dairesine (sürtünmeli çark mekanizması) kinematik olarak eşdeğer ve birbirleri ile eş çalışan iki dişin yan yüzeyi (diş refilleri) bir kayma-yuvarlanma kinematik çifti teşkil ederler ve izafi hareketleri bir ani dönme hareketidir. Bu harekette ani dönme merkezi yuvarlanma dairelerinin değme noktasıdır. Dişli Ana Kanunu

50
Dişli çifti mekanizması

54
Evolvent profilli dişlilerde eksen aralığındaki bir değişme eş çalışabilme özelliğini bozmaz

55
Dişli çifti mekanizması

56
Dişli çarklardaki kontrol noktaları Dişler arası boşluk

57
Dişli çarklardaki kontrol noktaları Eğilme yorulması

58
a)Düzgün b) Düzgün olmayan yükleme Diş dibi yuvarlatmaları neticesi yorulma Dişli çarklardaki kontrol noktaları
Düzgün b) Düzgün olmayan yükleme Diş dibi yuvarlatmaları neticesi yorulma Dişli çarklardaki kontrol noktaları")
59
Ezilme yorulması

60
Dişli çarklardaki kırılma ve aşınma Eğilme yorulması Yüzey yorulması sonucu aşınma

61
Dişleri değişebilir dişli çark

62
Çark-Göbek Bağlantıları

89
Ders Kitabı (Notu) Ders Notları mevcut Diğer Kaynaklar Joseph Edward Shigley, Mechanical Engineering Design, McGraw-Hill International Editions, First Metric Edition, 1986. Tochtermann/Bodenstein, Konstruktionselemente des Machinenbaues 1,2, Springer-Verlag Juvinall, R.J. and Marshek, K.M., Fundamentals of Machine Component Design, 3rd Edition, John Wiley & Sons, 2000. Deutschman, A.D., Wilson,C.E and Michels, W.J., Machine Design, Prentice Hall, 1996. Erdman, A.G. and Sandor, G.N., Mechanism Design Analysis and Synthesis, Vol. 1, 3rd Edition, Prentice Hall, 1997. Shigley, J.E., Uicker, J.J., Theory of Machines and Mechanisms, Second Edition, McGraw-Hill, 1995.






















 Ad: Soyadı: Okul no: Tarih: Sınav no: 1- 2- 3- 6N 7N 8N Şekildeki.>")



>")




 HANDLING CHARACTERISTICS.>")

