Sunuyu indir
1
Bilgisayar Grafikleri Ders 3: 2B Dönüşümler
Doç. Dr. Cemil Öz Bilgisayar Grafikleri Ders 3: 2B Dönüşümler SAÜ Bilgisayar Mühendisliği Dr. Cemil Öz

2
Matris m x n tane sayının, m satır ve n sütuna yerleştirilmesiyle oluşturulan tabloya bir matris denir. Genel olarak bir matris şeklinde gösterilir ve A, B, C, ... gibi harfler ile temsil edilir. m satır ve n sütundan oluşan bir matrise m x n tipinde bir matris ve aij sayılarına da matrisin öğeleri denir. m x n tipindeki bir matris, kısaca A = (aij)mxn şeklinde yazılır. Bir aij öğesindeki i indisi öğenin i. satırda olduğunu, j indisi ise j. sütunda olduğunu gösterir. Bundan dolayı aij öğesi, matrisin i. satır ile j. sütununun kesiştiği yerdedir
mxn şeklinde yazılır. Bir aij öğesindeki i indisi öğenin i. satırda olduğunu, j indisi ise j. sütunda olduğunu gösterir. Bundan dolayı aij öğesi, matrisin i. satır ile j. sütununun kesiştiği yerdedir.")
3
matrisinde a23 öğesi, 2. satır ile 3
matrisinde a23 öğesi, 2. satır ile 3. sütunun kesiştiği yerde olan 5'tir.

4
Matrislerin Toplanması
A = (aij)mxn ve B = (bij)mxn aynı tipten iki matris olsun. Öğeleri, cij = aij + bij (i = 1, 2 , ..., m; j = 1, 2, ..., n) şeklinde oluşturulan C = (cij)mxn matrisine A ve B matrislerinin toplamı denir ve bu matris A + B şeklinde gösterilir.
mxn ve B = (bij)mxn aynı tipten iki matris olsun. Öğeleri, cij = aij + bij (i = 1, 2 , ..., m; j = 1, 2, ..., n) şeklinde oluşturulan C = (cij)mxn matrisine A ve B matrislerinin toplamı denir. ve bu matris A + B şeklinde gösterilir.")
5
Matrisin sabit sayı ile çarpılması
A = (aij)mxn ve r ∈ R olsun. Öğeleri, bij = r aij (i = 1, 2 , ..., m; j = 1, 2, ..., n) şeklinde oluşturulan B = (bij)mxn matrisine A matrisinin r sayısı ile çarpımı denir ve bu matris rA şeklinde gösterilir.
mxn ve r ∈ R olsun. Öğeleri, bij = r aij (i = 1, 2 , ..., m; j = 1, 2, ..., n) şeklinde oluşturulan B = (bij)mxn matrisine A matrisinin r sayısı ile çarpımı denir. ve bu matris rA şeklinde gösterilir.")
6
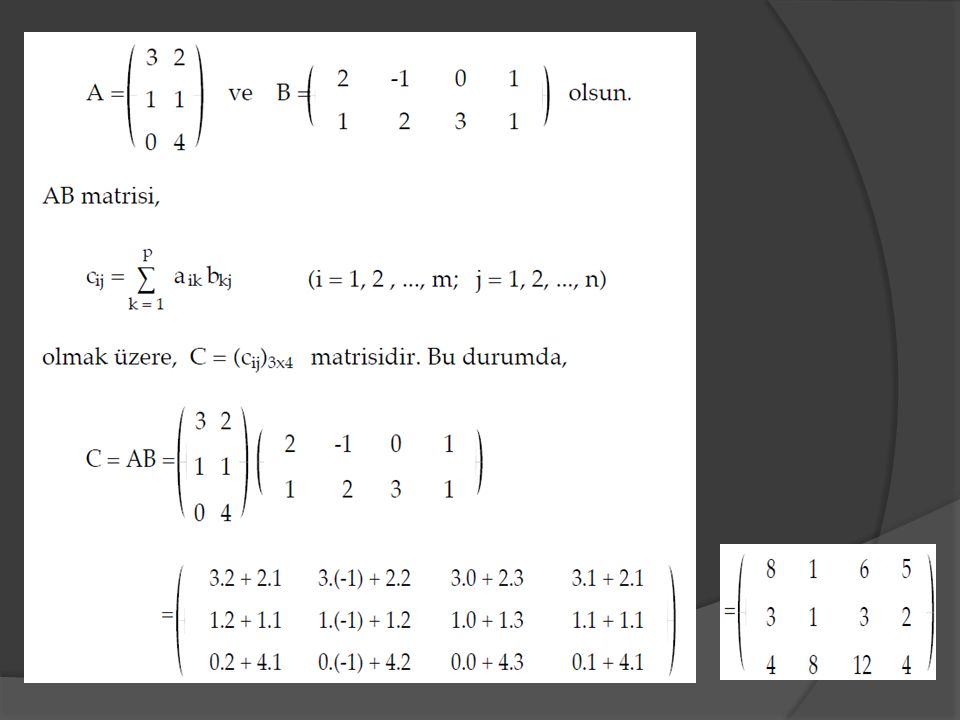
Matrislerin Çarpımı A = (aij)mxp ve B = (bij)pxn olsun. (i = 1, 2 , ..., m; j = 1, 2, ..., n) şeklinde oluşturulan C = (cij)mxn matrisine A ile B matrisinin çarpımı denir ve bu matris AB şeklinde gösterilir. A = (aij)mxp ile B = (bij)pxn matrisinin çarpımı olan AB matrisinin satır sayısı, A matrisinin satır sayısına, sütun sayısı ise B matrisinin sütun sayısına eşittir. Ayrıca, iki matrisin çarpılabilmesi için birinci çarpan matrisinin sütun sayısı ile ikinci çarpan matrisinin satır sayısının eşit olması gerektiğine dikkat edilmelidir.
mxn matrisine A ile B matrisinin çarpımı denir ve bu. matris AB şeklinde gösterilir. A = (aij)mxp ile B = (bij)pxn matrisinin çarpımı olan AB matrisinin satır sayısı, A matrisinin satır sayısına, sütun sayısı ise B matrisinin sütun sayısına eşittir. Ayrıca, iki matrisin çarpılabilmesi için birinci çarpan matrisinin sütun sayısı ile ikinci çarpan matrisinin satır sayısının eşit olması gerektiğine dikkat edilmelidir.")
8
İKİ BOYUTLU DÖNÜŞÜMLER
Temel grafik elemanları olan nokta ve çizgi gösterimleri ve bunlara uygulanan dönüşümleri ele alalım. Bu bölümler BG nin temelini oluşturacaktır. Herhangi bir obje görüntülendiğinde; ölçekleme, döndürme, öteleme yada perspektif oluşma istenebilir. 2D uzayda nokta satır, veya sütun vektörü ile, Burada satır vektör gösterimi ele alınacaktır. Bu satır matrisler genellikle, konum vektörleri (position vectors) olarak anılmaktadır. Birden fazla nokta bir matris olarak bilgisayarda saklanır. Böylece bu noktaların konumlarının denetimi, bu matris üzerinde yapılan işlemlerle gerçeklenir.
 olarak anılmaktadır. Birden fazla nokta bir matris olarak bilgisayarda saklanır. Böylece bu noktaların konumlarının denetimi, bu matris üzerinde yapılan işlemlerle gerçeklenir.")
9
Genel olarak 2x2 bir T dönüşüm matrisini ele alalım.
DÖNÜŞÜMLER: Genel olarak 2x2 bir T dönüşüm matrisini ele alalım. Bu gösterim, P(x,y) noktasının P*(x*,y*) noktasına dönüşümü olarak alınacaktır.
 noktasının P*(x*,y*) noktasına dönüşümü olarak alınacaktır.")
10
Bazı özel durumları göz önüne alalım
Yatay Eksende Ölçekleme

11
c) c=b=0 durumunda x,y’de ölçekleme a=d>1 ise büyütme 1>a=d>0 ise küçültme
 c=b=0 durumunda x,y’de ölçekleme a=d>1 ise büyütme 1>a=d>0 ise küçültme")
12
d ) Eğer a ve/veya d negatif ise, eksene yada düzleme göre ayna lama (reflection) oluşacaktır.
Örneğin, a = -1, d = 0, b = c = 0

13
Ölçekleme ile simetrik alma işlemleri gerçeklenebilir
Ölçekleme ile simetrik alma işlemleri gerçeklenebilir. Dönüşüm matrisinin köşegen elemanları ölçekleme ve aynalama etkisi yapar.

14
Bu etki, (shearing) olarak anılmaktadır
Bu etki, (shearing) olarak anılmaktadır. Bir başka deyişle köşegen dışı elemanların 0 dan farklı olması bu etkiyi oluşturmaktadır. (x, y) noktası orijin olduğunda bu dönüşümlerden etkilenmeyecektir. Şimdi benzer şekilde A ve B noktaları ile verilmiş bir doğru parçasına dönüşüm uygulayabiliriz:
 olarak anılmaktadır. Bir başka deyişle köşegen dışı elemanların 0 dan farklı olması bu etkiyi oluşturmaktadır. (x, y) noktası orijin olduğunda bu dönüşümlerden etkilenmeyecektir. Şimdi benzer şekilde A ve B noktaları ile verilmiş bir doğru parçasına dönüşüm uygulayabiliriz:")
15
ORTA NOKTA DÖNÜŞÜMÜ: Doğrunun uç noktaları Ve dönüşüm matrisi T
Uç noktalarının dönüşümü

16
A*B* doğrusunun orta noktası (x*m,y*m) olsun. Buna göre;
T dönüşümünü bu noktaya uygularsak, sonucun aynı olacağını kolaylıkla görürüz. Böylece bir doğrunun noktalarının bire bir dönüştüğünü söyleyebiliriz.

18
DÖNDÜRME ( ROTASYON )
")
19
Şimdi genel olarak bir açısı kadar döndürmeye karşılık dönüşümü bulmalıyız. Bunu bulmak için bir P noktası alalım.

20
x-y düzleminde iki boyutlu döndürmeyi x-y eksenine dik bir eksen etrafında döndürme olduğundan yola çıkarsak, ayna lamayı da benzer biçimde x, y düzlemi içinde, etrafında 1800 lik bir döndürme olarak tanımlanabilir.

21
ÖLÇEKLEME ( SCALING ) : Ölçeklemenin, dönüşüm matrisinin asal köşegen elemanları ile gerçeklendiğini biliyoruz. Örneğin, aşağıda verilen dönüşüm matrisi[T], şekilli 2 kat büyütülecek diyebiliriz. Bu düzgün ölçekleme olarak anılır. Eğer ölçekleme genlikleri farklı ise bu durumda bozulma olacaktır ki, bu da düzgün olmayan ölçekleme olarak anılır. Düzgün olmayan ölçekleme

23
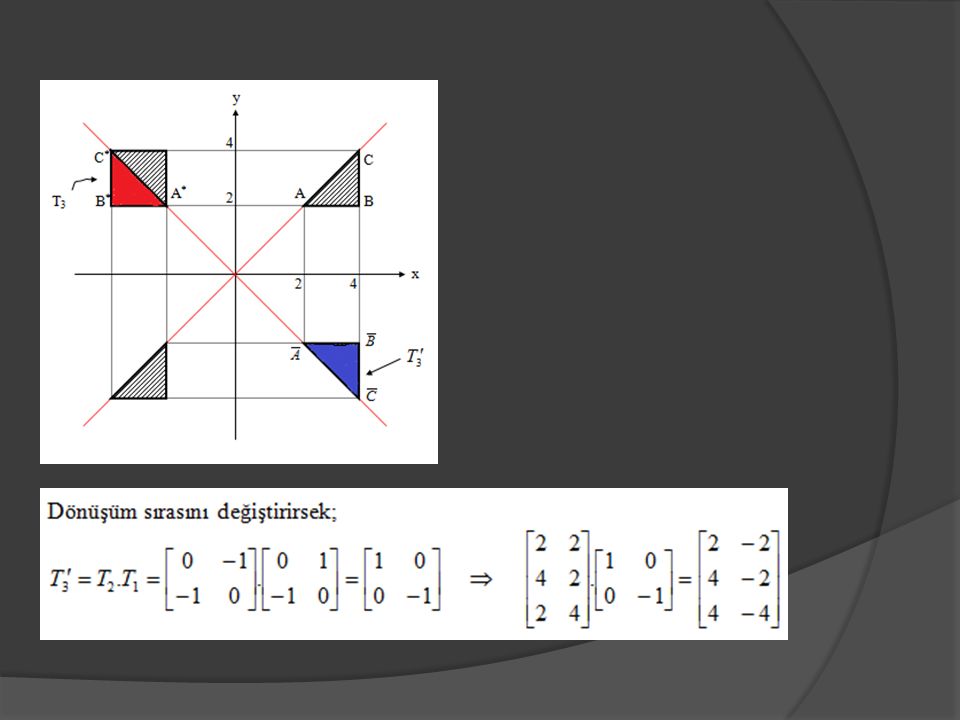
BİRLEŞİK DÖNÜŞÜMLER: Bir noktaya T1 dönüşümü sonra da T2 dönüşümü yapılıyorsa, sonuçta bu noktaya T3 = T1.T2 dönüşümü uygulanmıştır. Demek ki bir resme yapılacak dönüşümleri her zaman birleştirebiliriz.








>")
![EĞİM EĞİM-1 :Bir dik üçgende dikey (dik) uzunluğun yatay uzunluğa oranına (bölümüne) eğim denir. Eğim “m” harfi ile gösterilir. [AB] doğrusu X ekseninin.](/7/1973076/big_thumb.jpg "EĞİM EĞİM-1 :Bir dik üçgende dikey (dik) uzunluğun yatay uzunluğa oranına (bölümüne) eğim denir. Eğim “m” harfi ile gösterilir. [AB] doğrusu X ekseninin.>")



 MOMENTİ>")









