Sunuyu indir
2
BÖLÜM 15 AA Sürücüleri

6
15.1 GİRİŞ DA motorlarının çok basit dekuplajlı yapılarına karşı AA motorları; son derece kuplajlı, doğrusal olmayan ve çok değişkenli yapılar sergilemektedir. AA sürücülerinin kontrolü genellikle, mikroişlemciler veya mikro bilgisayarlar ile birlikte hızlı anahtarlamalı güç dönüştürücüleri kullanılarak uygulanabilen karmaşık kontrol algoritmaları gerektirir.

7
15.2 Asenkron Motor Sürücülerİ

8
15.2.1 Performans Karakteristikleri

9
15.2.2 Moment-Hız Karakteristikleri

10
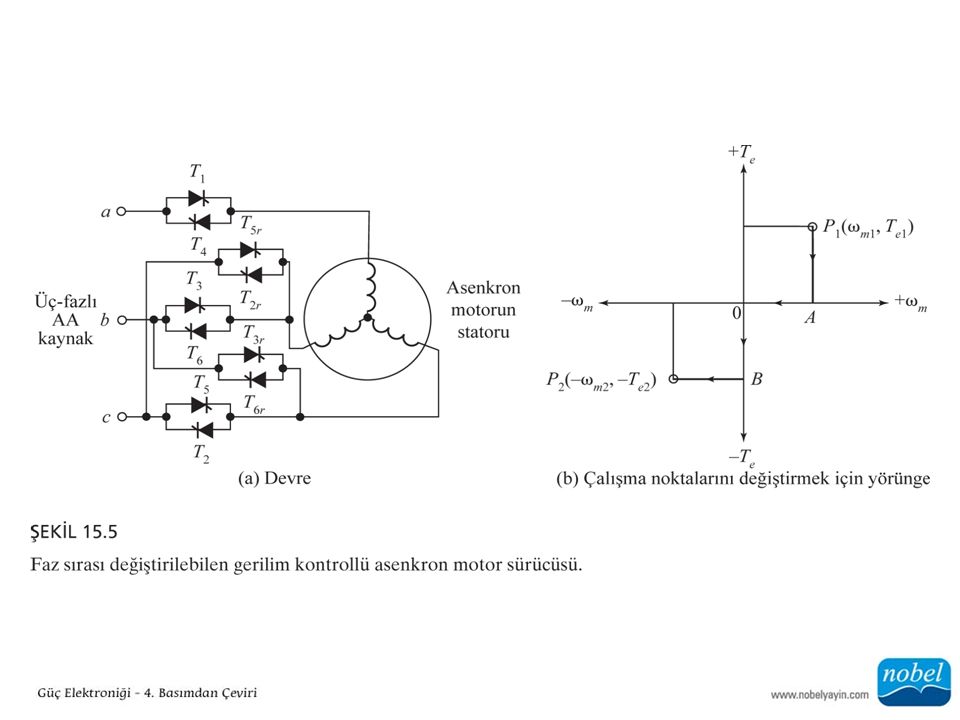
15.2.3 Stator Gerilim Kontrolü

12
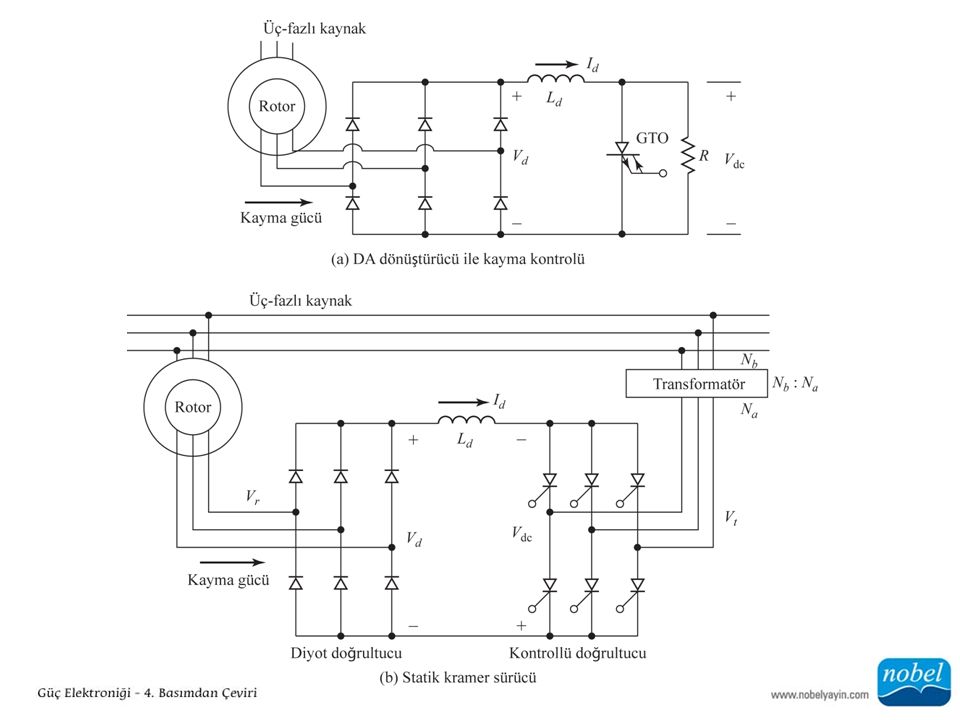
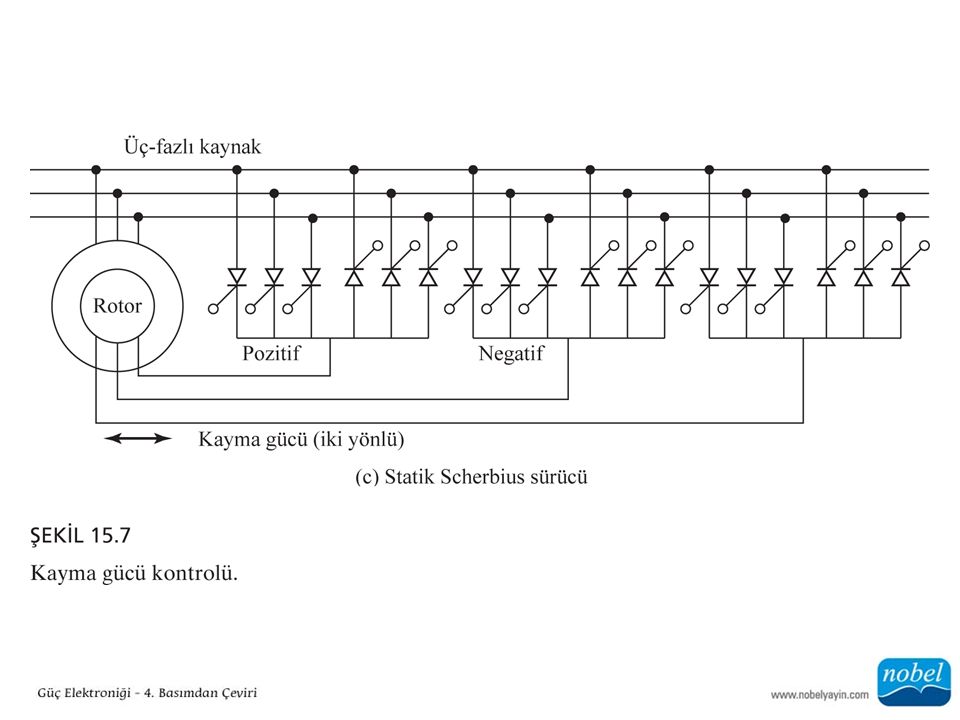
15.2.4 Rotor Gerilim Kontrolü

16
Frekans Kontrolü

17
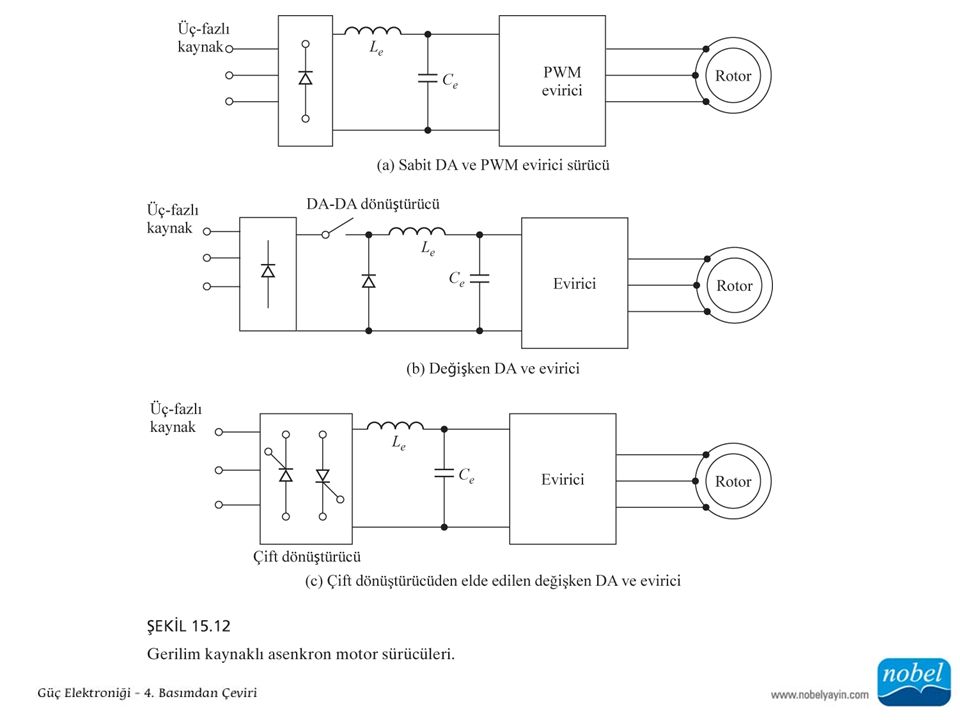
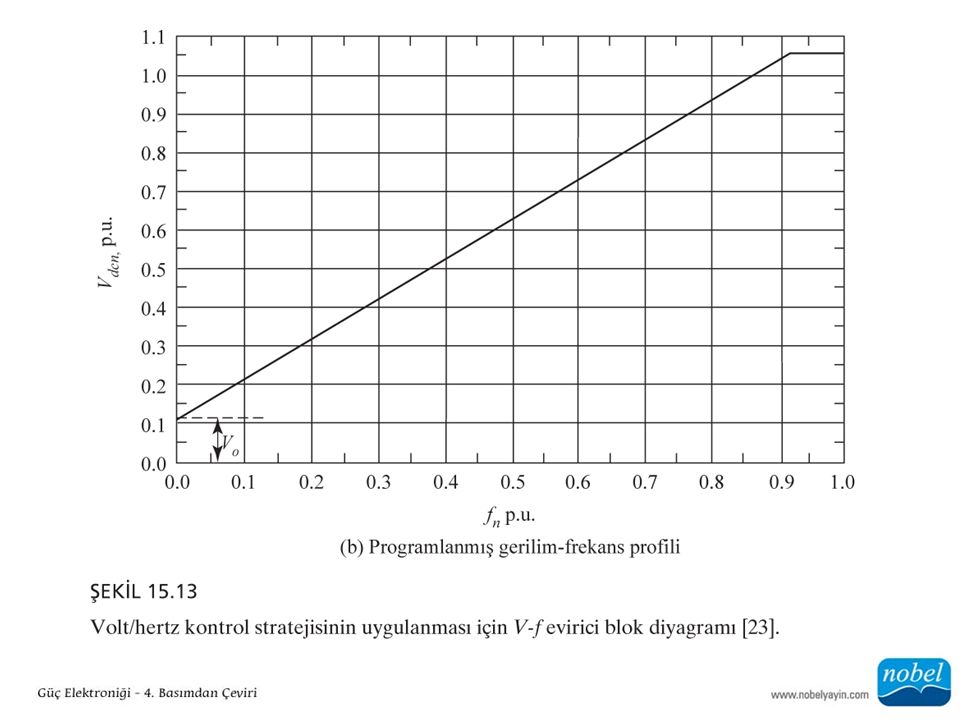
15.2.6 Gerilim ve Frekans Kontrolü

19
Devam ediyor

21
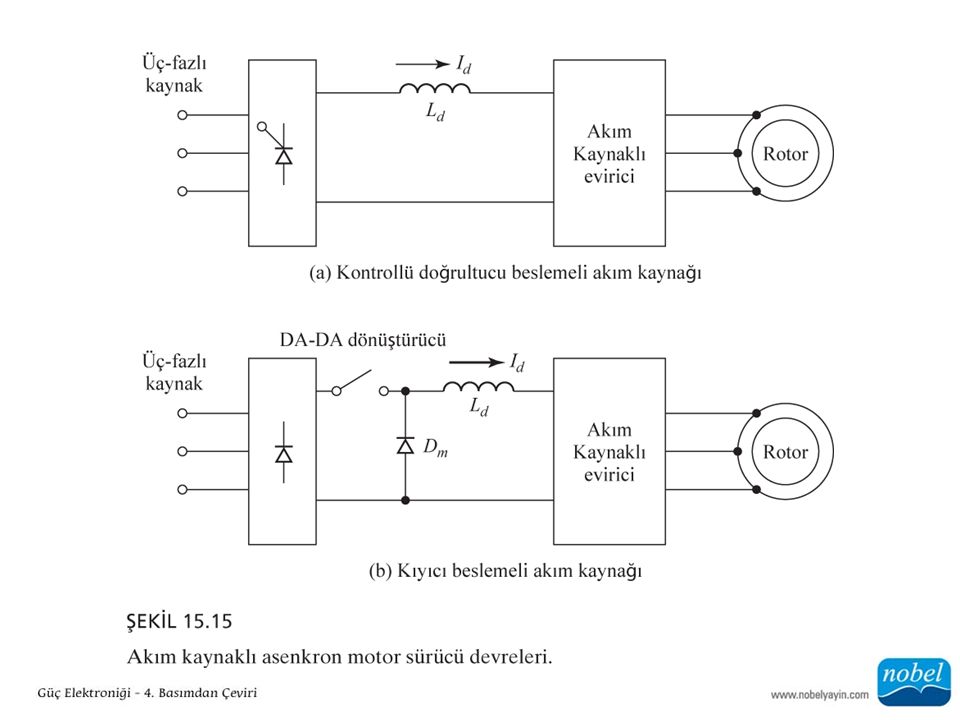
Akım Kontrolü

23
15.2.8 Sabit Kayma-Hız Kontrolü

24
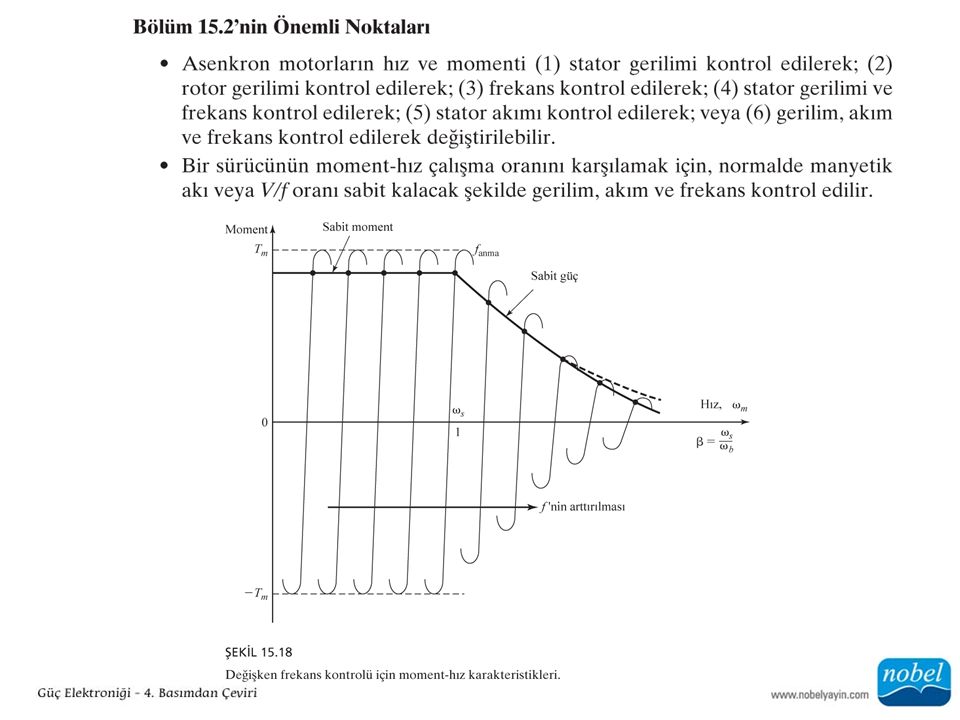
15.2.9 Gerilim, Akım ve Frekans Kontrolü

26
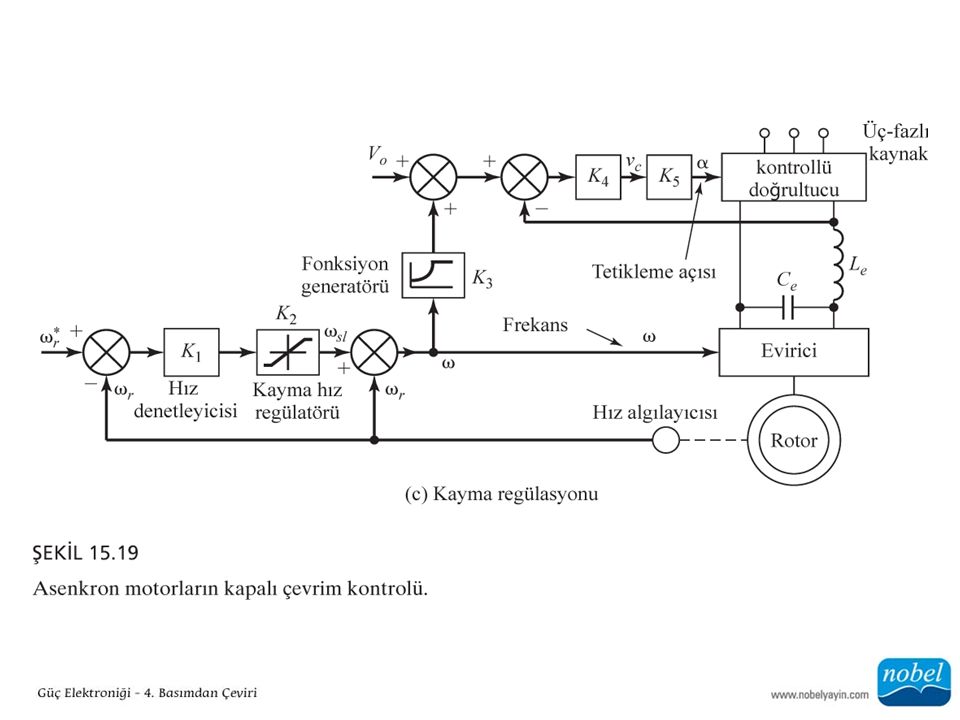
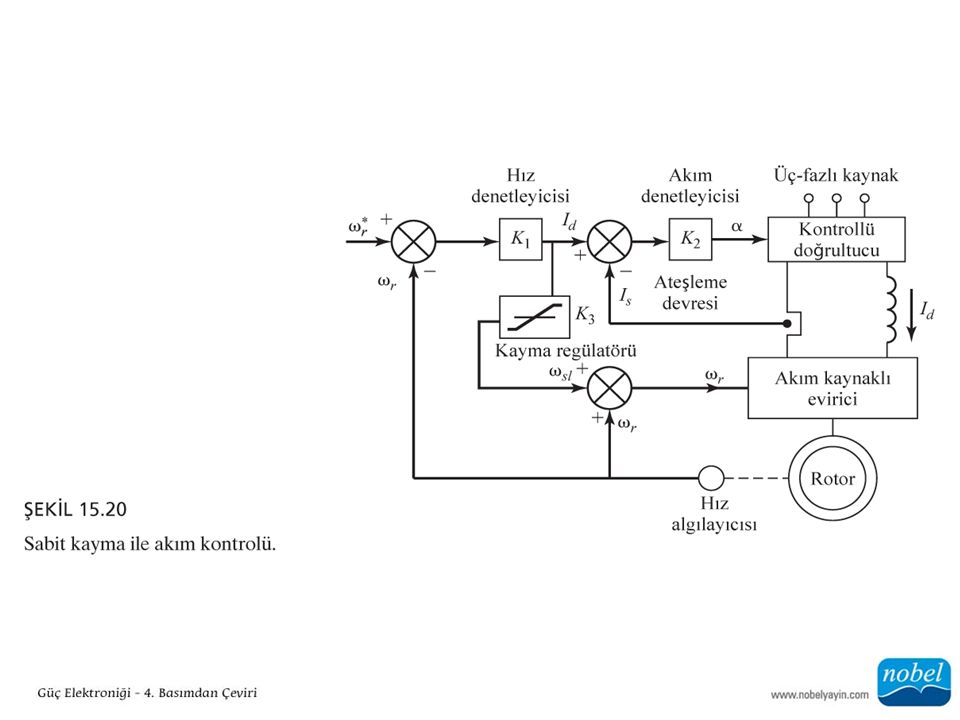
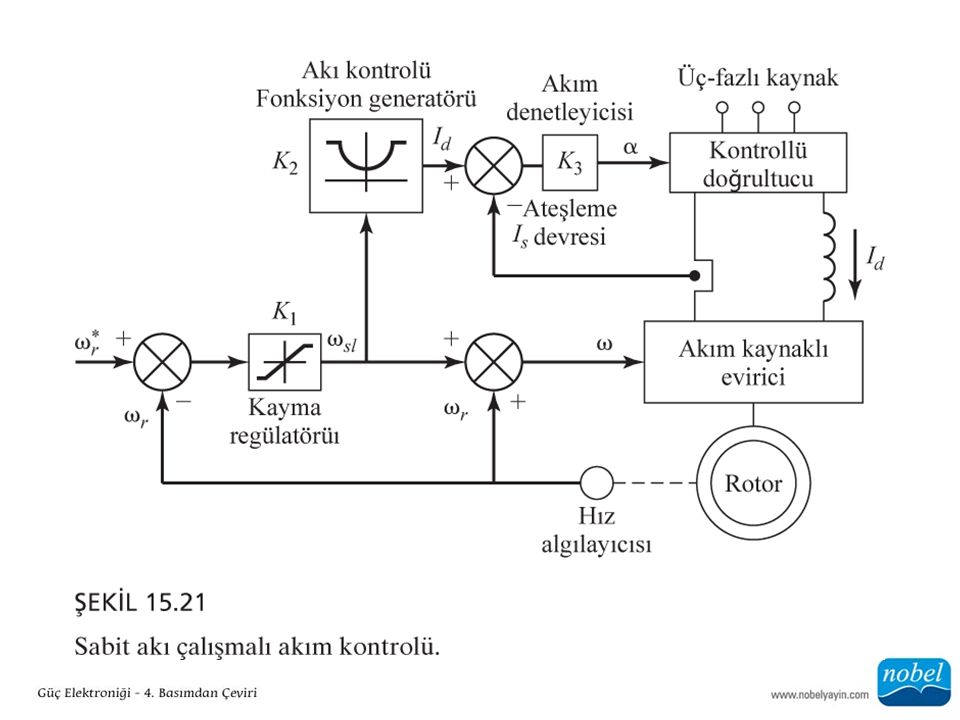
15.3 Asenkron MotorlarIn KapalI Çevrİm Kontrolü

32
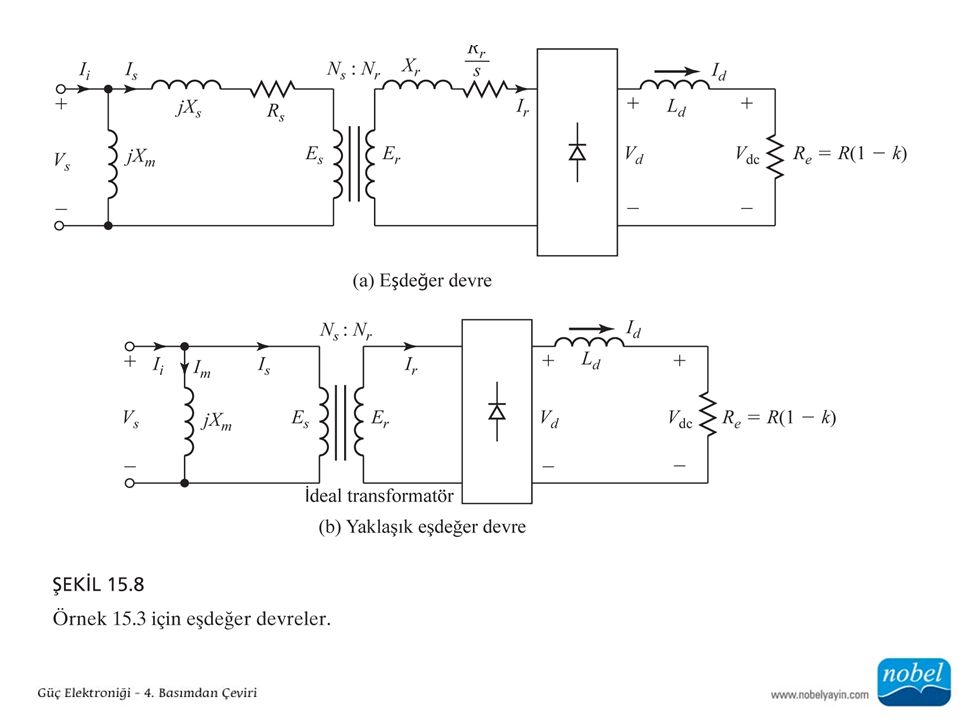
15.4 Kontrol DeğİşKENLERİNİN BOYUTLANDIRILMASI

33
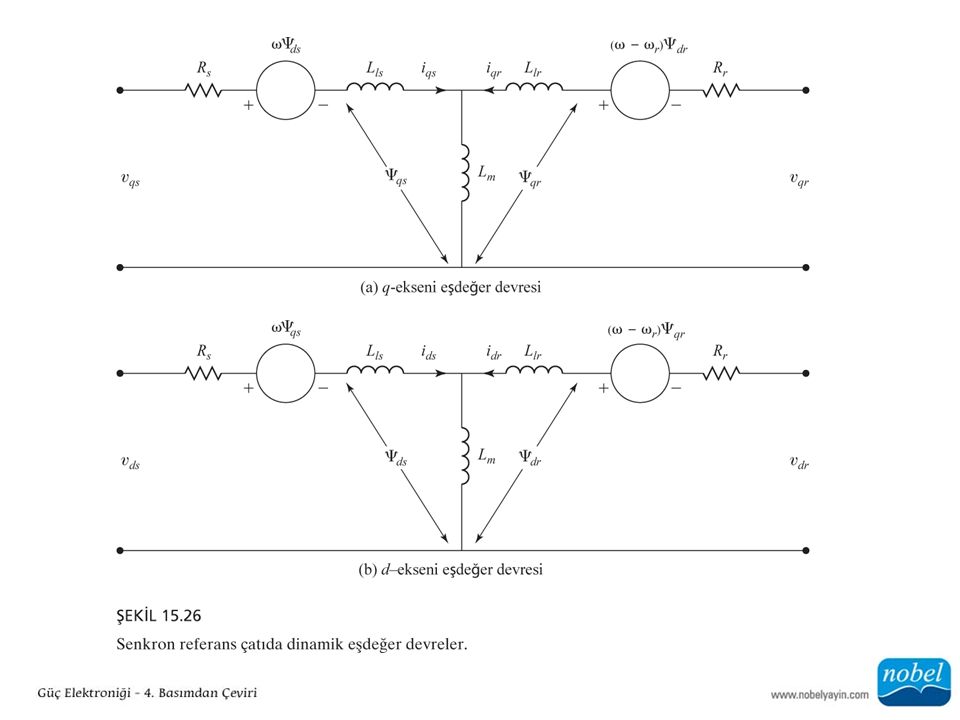
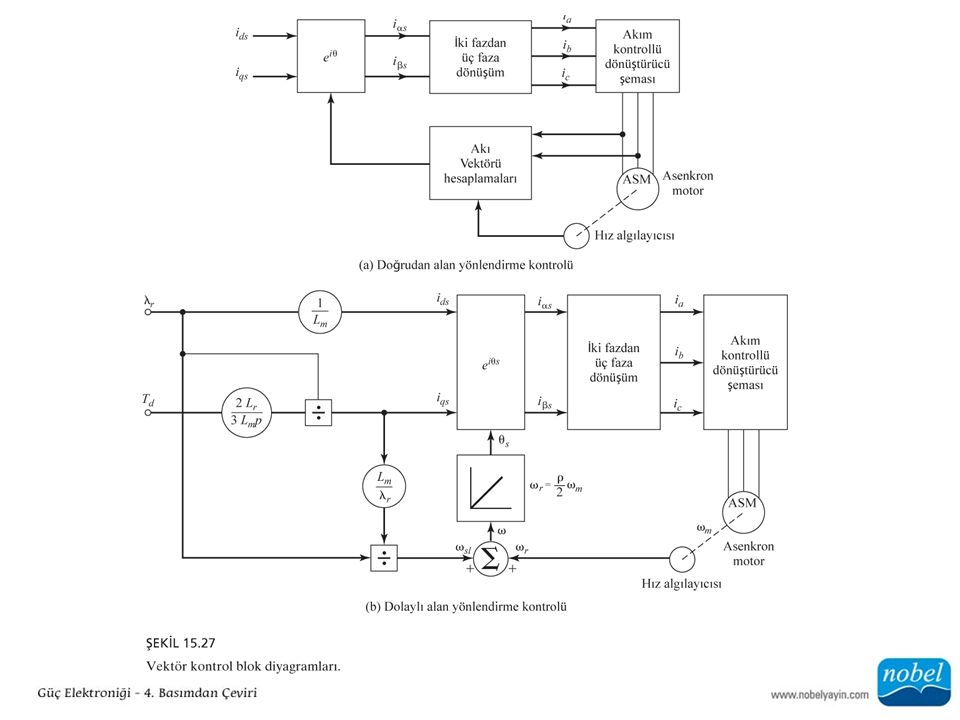
15.5 Vektör KONTROLLERİ Vektör Kontrolünün Temel Prensibi

34
d-q Eksen Dönüşümü

37
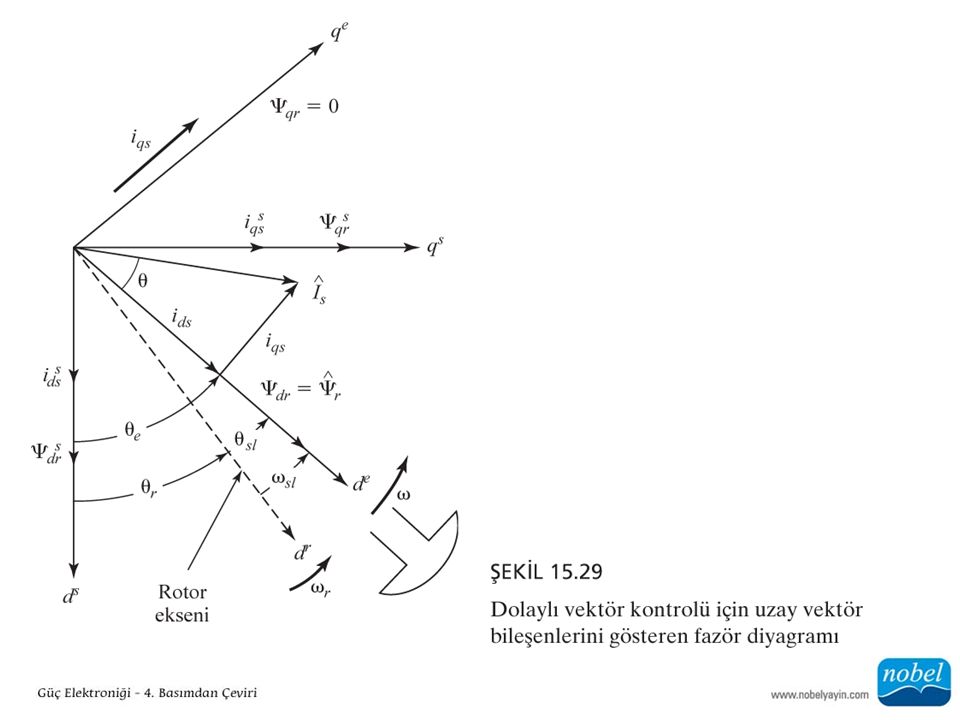
Dolaylı Vektör Kontro

39
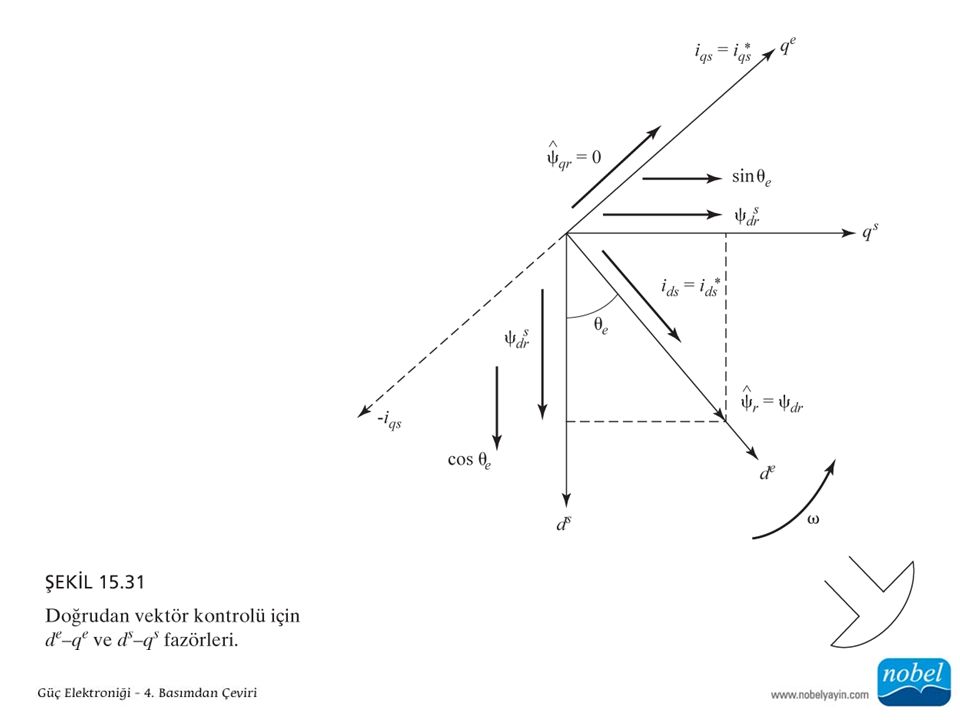
15.5.4 Doğrudan Vektör Kontrolü

42
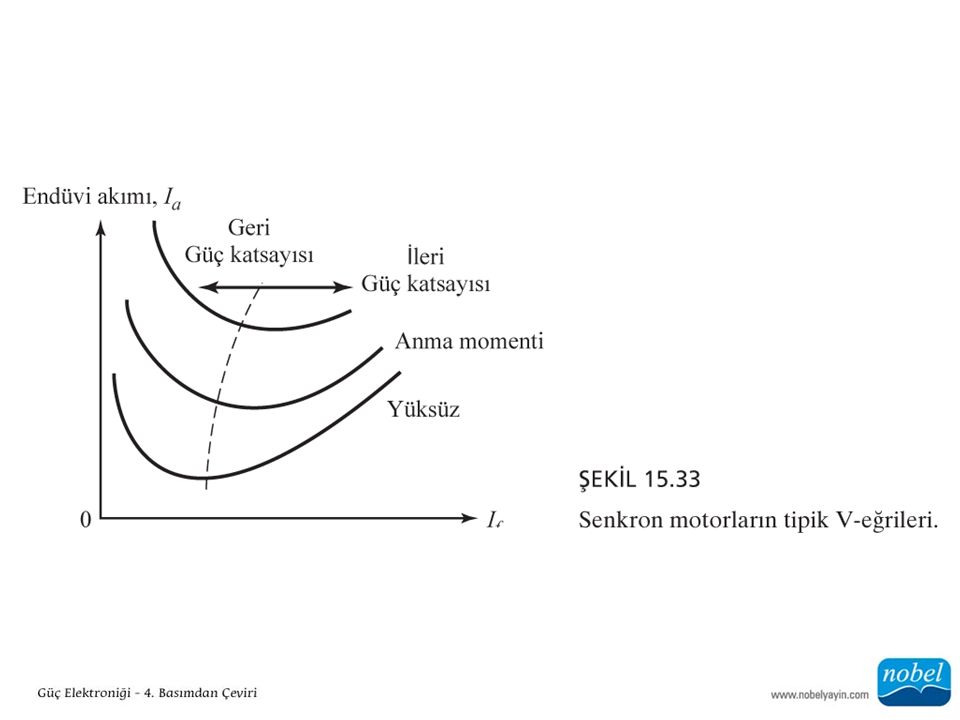
15.6 Senkron Motor Sürücülerİ
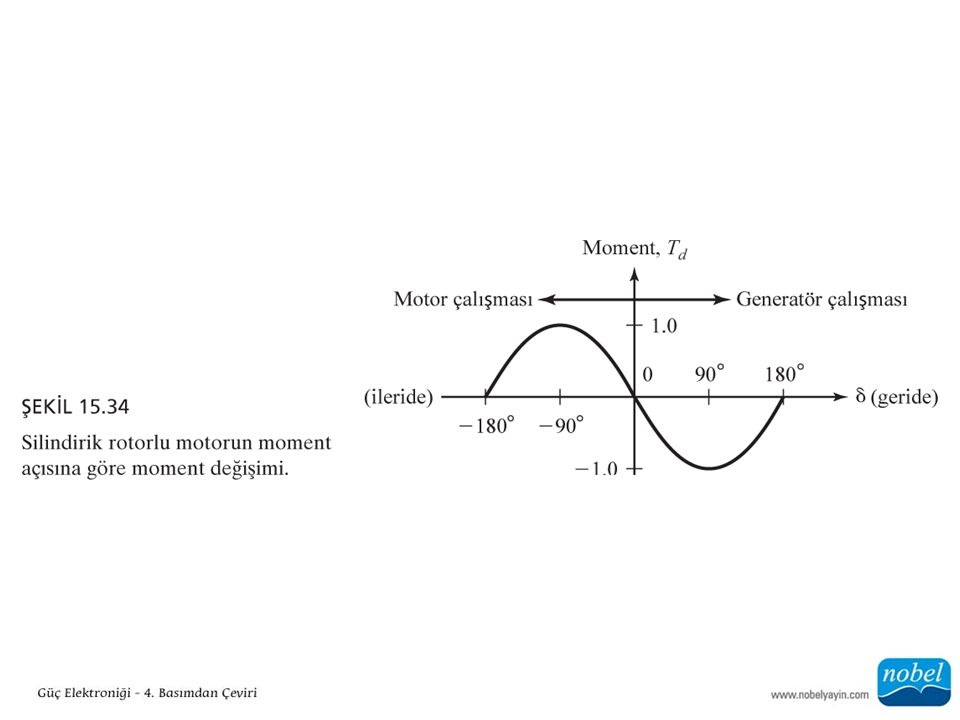
Silindirik Rotorlu Motorlar

45
15.6.2 Çıkık Kutuplu Motorlar

46
Relüktans Motorlar

47
15.6.4 Anahtarlamalı Relüktans Motorlar

48
15.6.5 Sürekli Mıknatıslı Motorlar

50
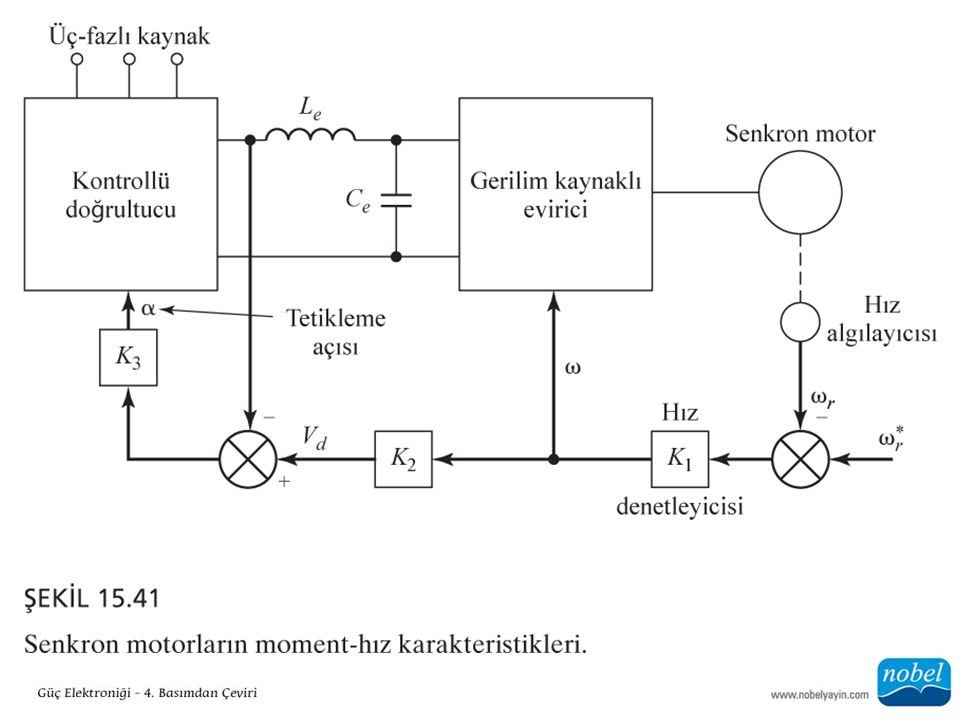
15.6.6 Senkron Motorların Kapalı Çevrim Kontrolü

52
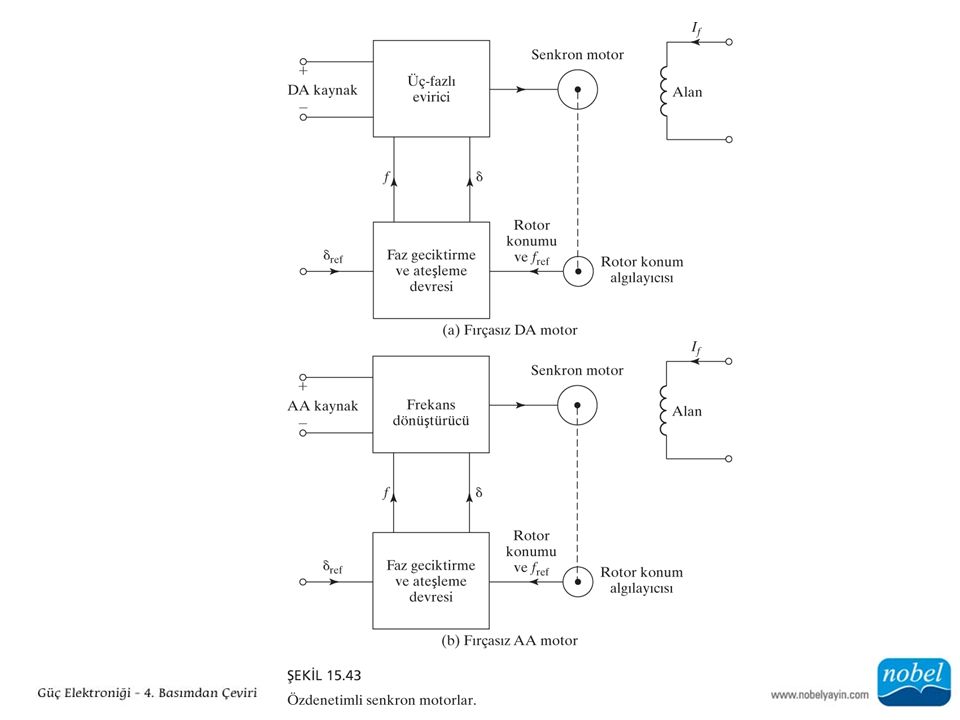
15.6.7 Fırçasız DA ve AA Motor Sürücüleri

55
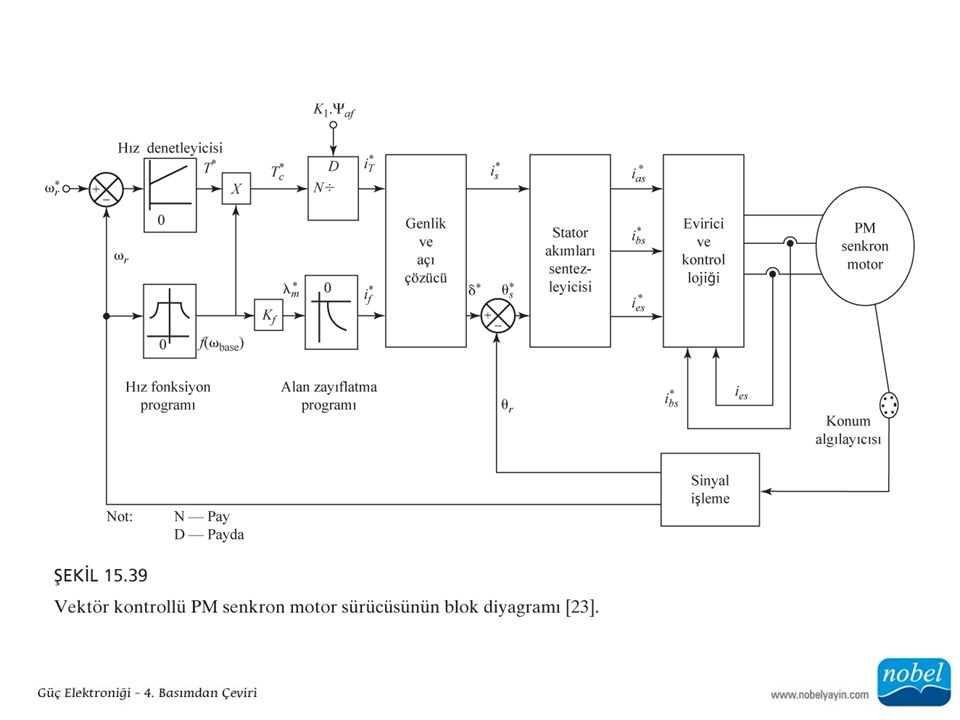
15.7 PMSM Sürücülerİ İÇİN HIZ DENETLEYİCİ TASARIMI
Sistem Blok Diyagramı

56
Akım Döngüsü

57
Hız Denetleyicisi

58
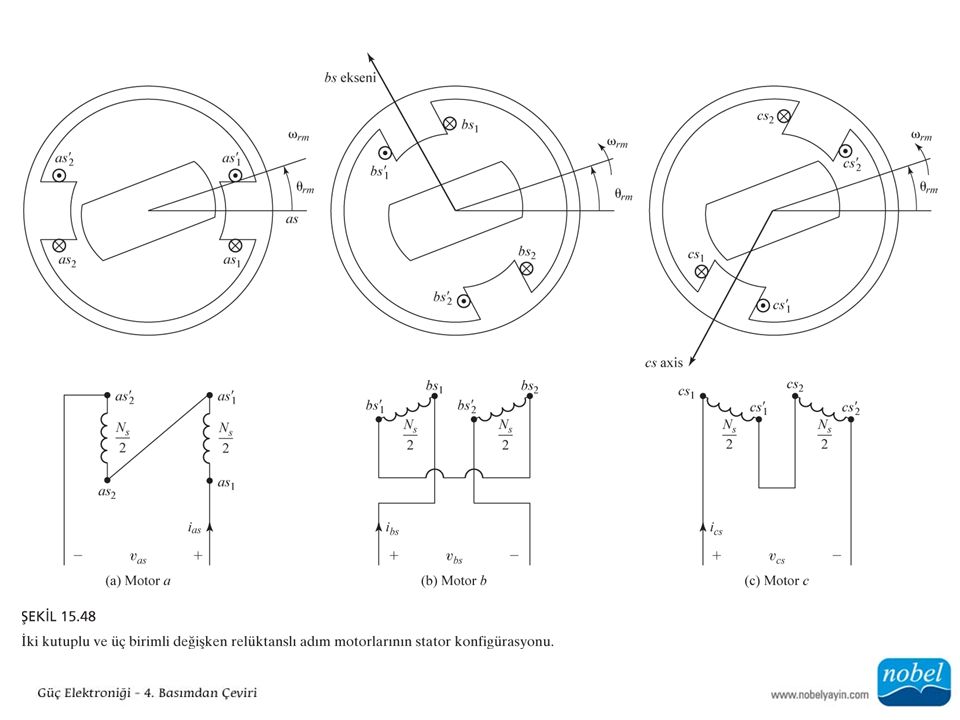
15.8 AdIm Motor Kontrolü Değişken Relüktanslı Adım Motorları

60
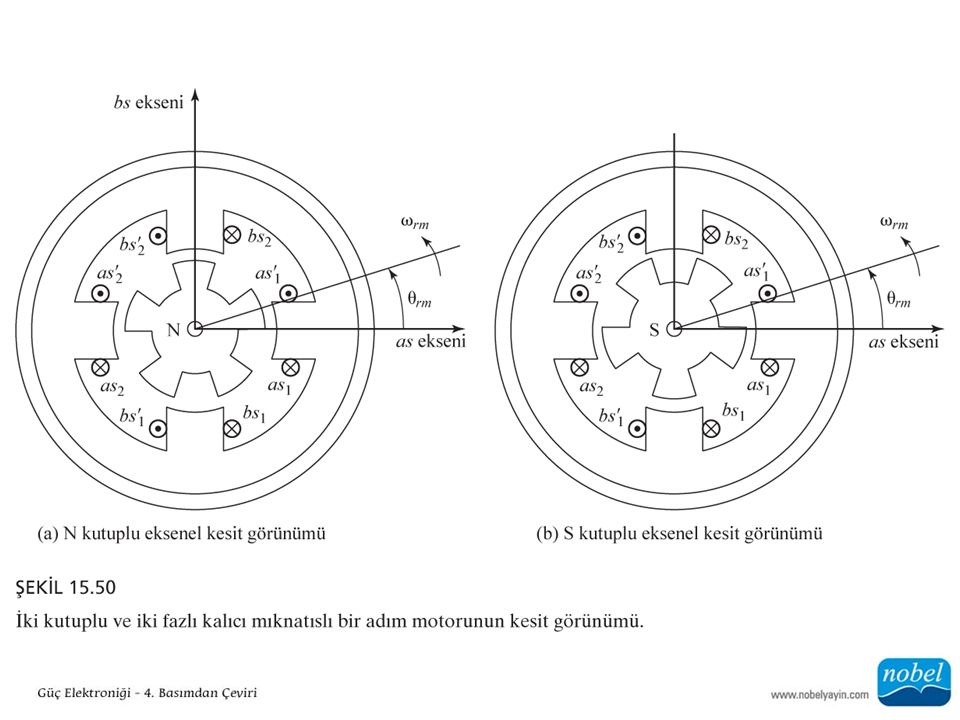
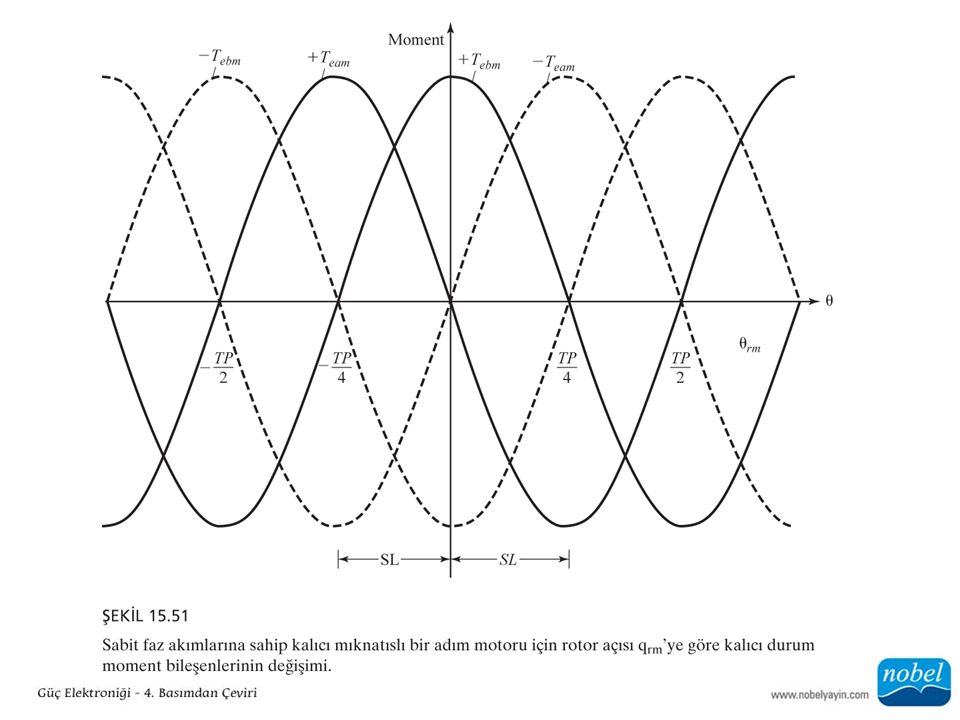
15.8.2 Kalıcı Mıknatıslı Adım Motorları

64
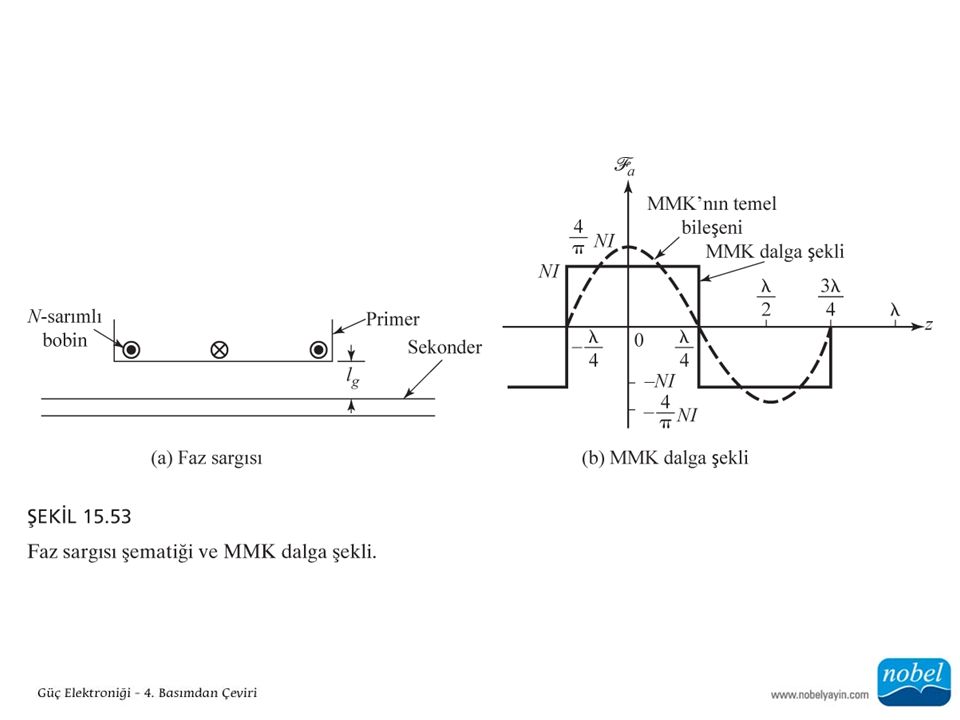
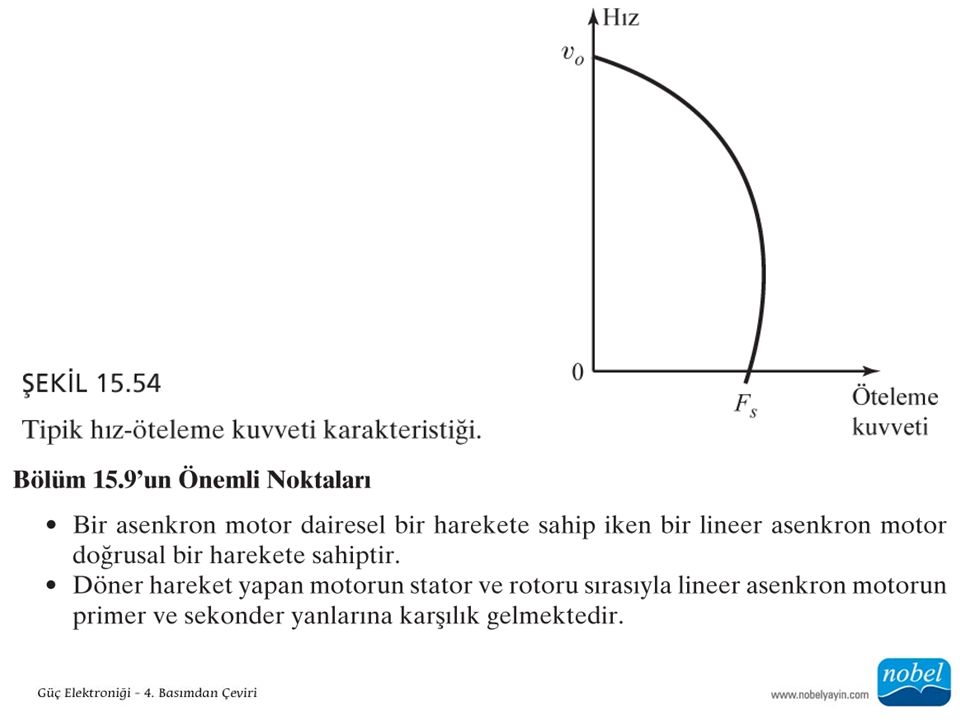
15.9 Lİneer Asenkron Motorlar

67
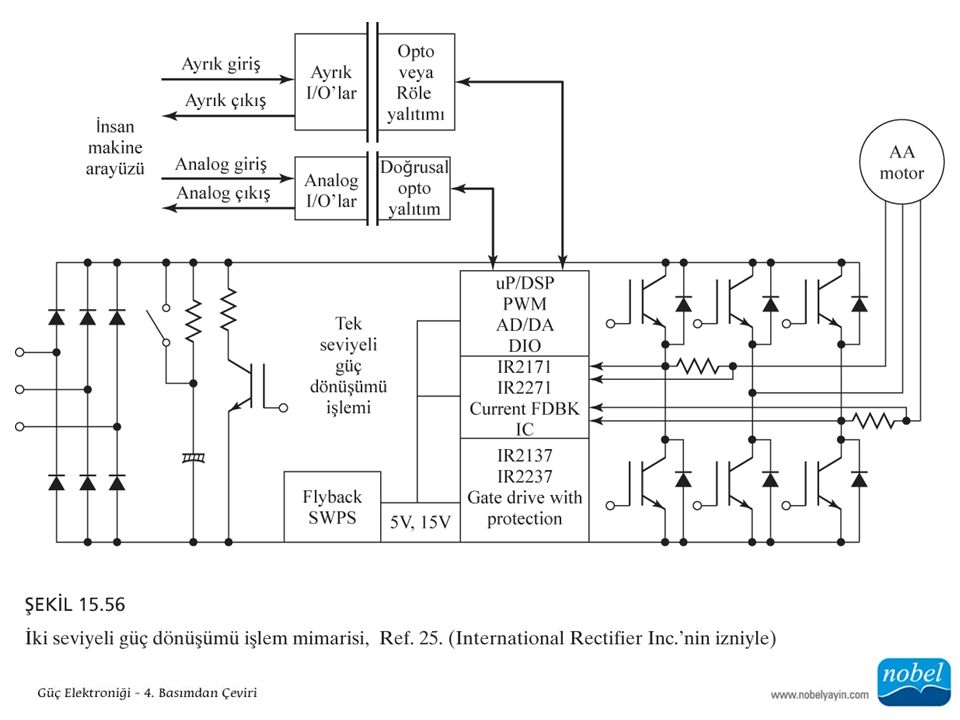
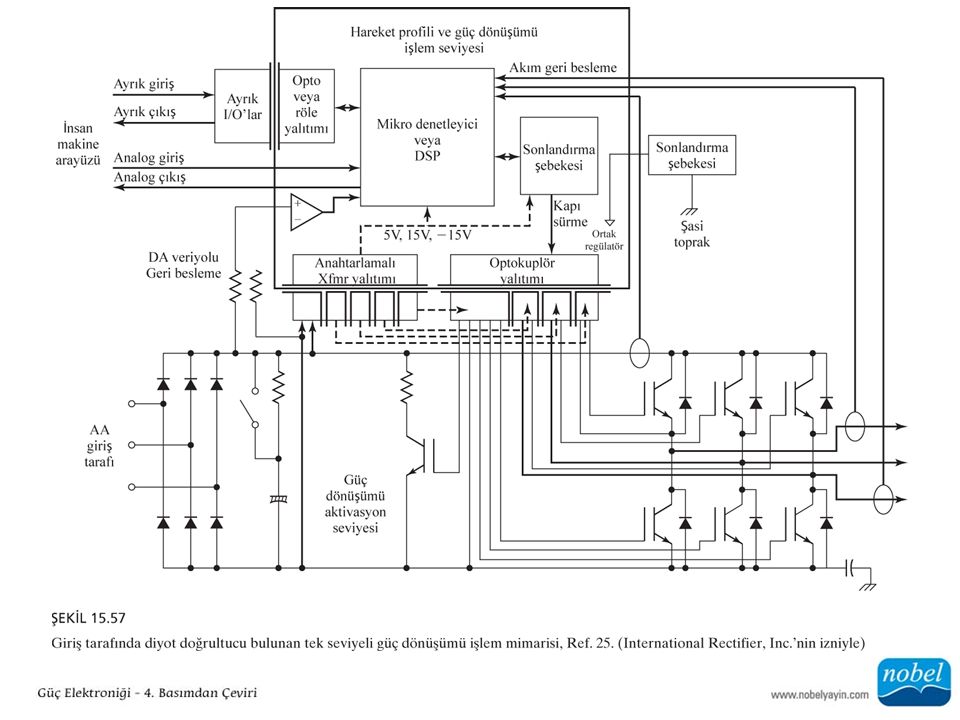
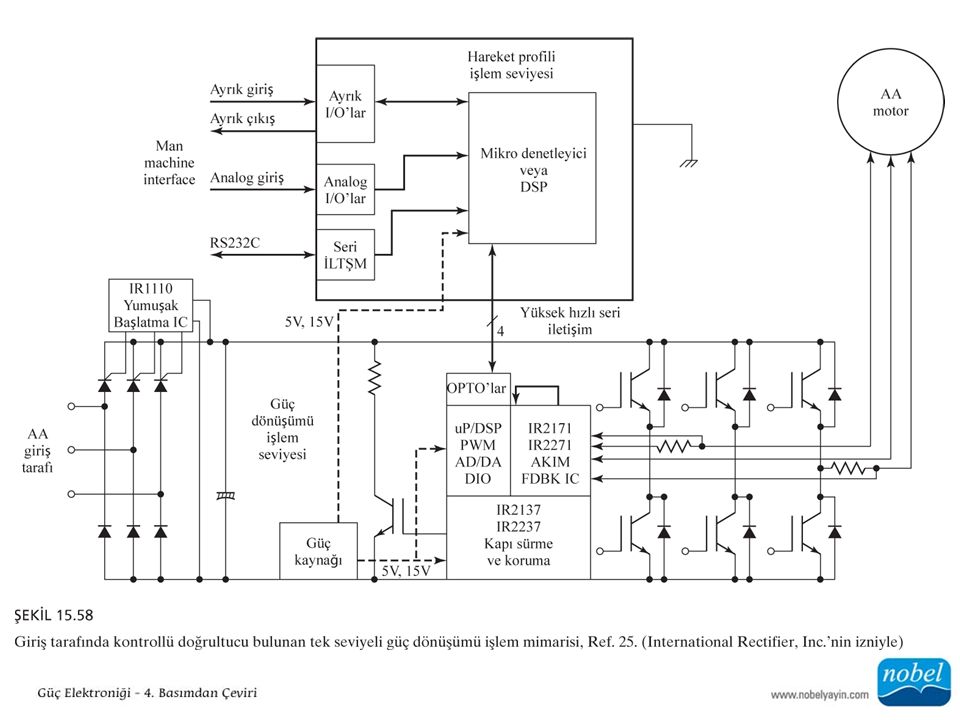
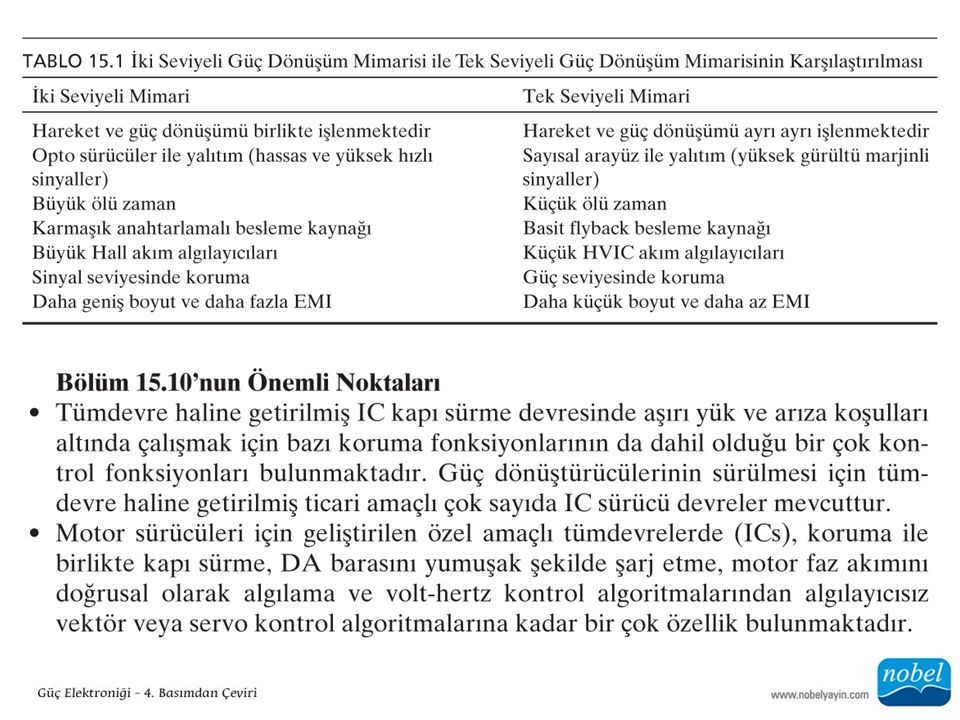
15.10 Motor Sürücülerİ İçİn Yüksek-GERİLİMLİ Tüm devreler (Ic)
")
72
özet AA sürücüleri gerilim, frekans ve akım kontrolü için ileri kontrol tekniklerine gerek duymasına rağmen DA sürücülerine göre avantajlara sahiptir. Gerilim ve frekans, gerilim kaynaklı eviriciler tarafından kontrol edilebilir. Akım ve frekans ise akım kaynaklı eviriciler tarafından kontrol edilebilir. Asenkron motorların kayma gücünü geri almak için kullanılan kayma gücünü geri alma tekniklerinde kontrollü doğrultucular kullanılmaktadır. Asenkron motorların kapalı çevrim kontrolünde kullanılan en yaygın yöntem, volt/hertz, akı veya kayma kontrolüdür. Değişken hız sürücülerinde hem sincap kafesli hem de rotoru sargılı asenkron motorlar kullanılmaktadır. Akım kaynaklı bir evirici yalnız bir motoru besleyebilirken gerilim kaynaklı bir evirici paralel bağlı belli sayıda motoru besleyebilmektedir.
















>")

>")

>")



