Sunuyu indir
1
SINUMERIK 810D/840D CNC FREZE PROGRAMLAMA
Ergün KESKİN SINUMERIK 810D/840D CNC FREZE PROGRAMLAMA Ergün KESKİN

2
P1 Ergün KESKİN

3
Makine Üzerindeki Noktalar
Ergün KESKİN Makine Üzerindeki Noktalar M Makine sıfır noktası: Makine sıfır noktası tezgah tablasına üstten bakıldığında tezgah tablasının sol alt köşesidir ve değiştirilemez. Makine sıfır noktası koordinat sisteminin merkezidir. R Referans noktası: Makine üzerinde sabit bir noktadır. Makine ilk açıldığında, elektrik kesilmesi durumlarında ve acil stop tuşuna basıldığında taretin referans noktasına gönderilmesi gerekir. Ergün KESKİN

4
W İş Parçası Sıfır Noktası: Kullanıcı tarafından istenilen herhangi bir noktaya programlanabilir. İş parçası sıfır noktası tanımlanarak makine sıfır noktası iş parçası sıfır noktasına taşınmış olur. N (T)Takım sıfır noktası: Taretin alın yüzeyinde takımın tarete bağlandığı eksende bulunur. Ergün KESKİN
Takım sıfır noktası: Taretin alın yüzeyinde takımın tarete bağlandığı eksende bulunur. Ergün KESKİN.")
5
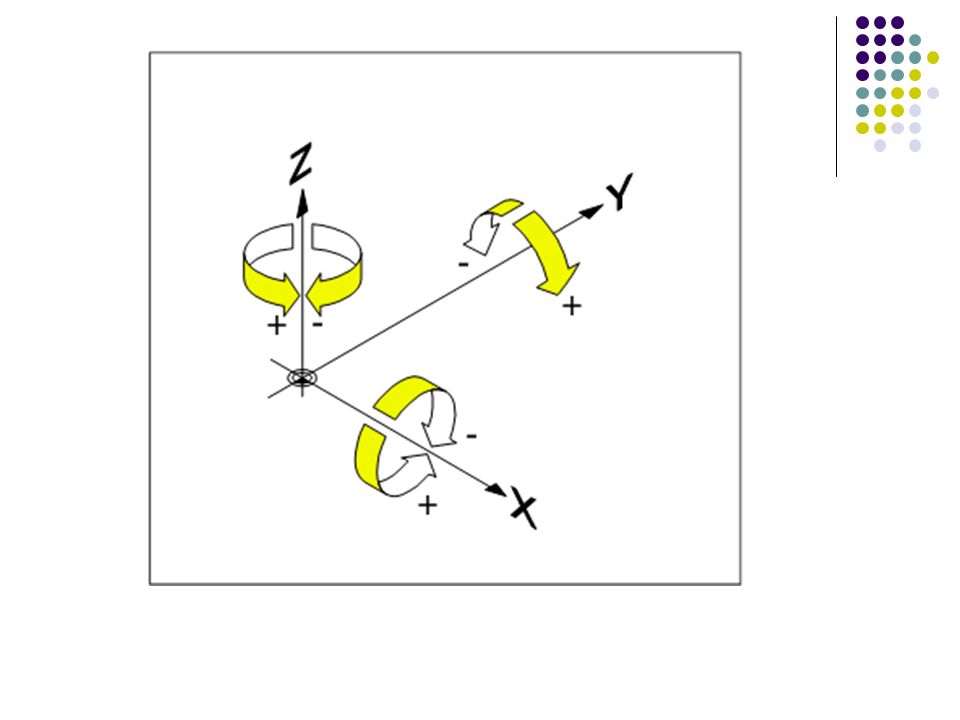
Makine Koordinat Sistemi
Ergün KESKİN

6
Ergün KESKİN

8
Sıfır Noktasının Kaydırılması
Makine sıfır noktası tezgah tablasının sol alt köşesidir. Bu nokta program yazmak için uygun değildir. Bu yüzden sıfır noktası kaydırma işlemi gerçekleştirilerek program bu yeni sıfır noktasına göre yapılır. Bu yeni nokta iş parçası sıfır noktasıdır. G54, G55, G56 ve G57 olarak 4 farklı sıfır noktası tanımlanabilir. Ergün KESKİN

10
Takım Boyları Makine konumlandırmada “N” takım sıfır noktasının kullandığından takım uç noktasının takım sıfır noktasından uzaklıkları kontrol ünitesine girilmelidir. “L1” Takım uç noktasının “Z” ekseninde takım sıfır noktasından uzaklığıdır. Ergün KESKİN

11
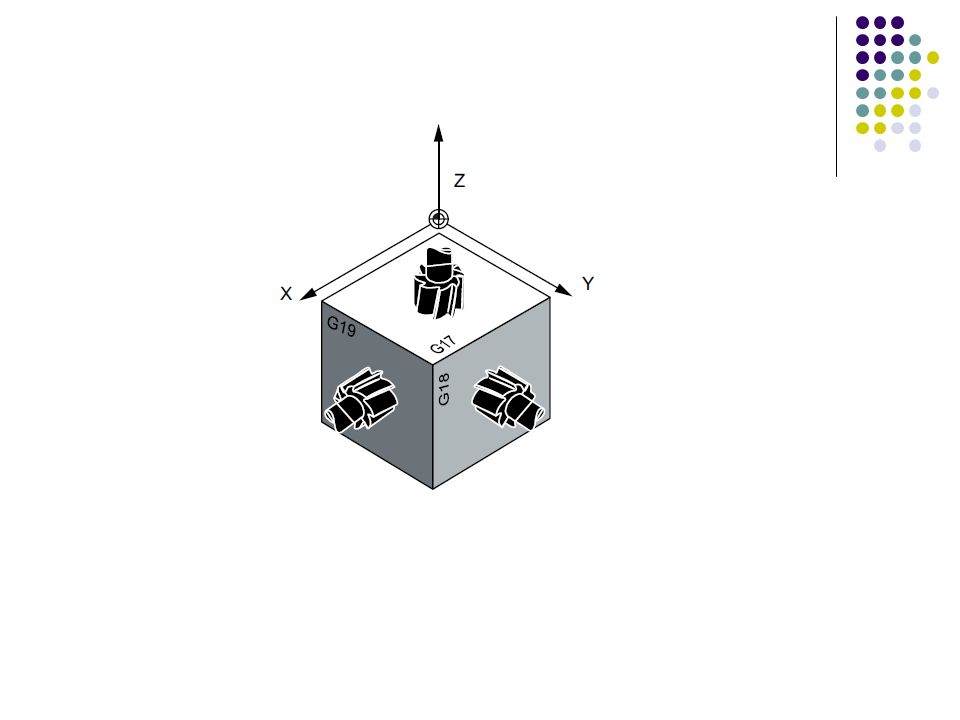
Çalışma Düzlemleri CNC freze tezgahlarında freze çakısı ekseninin dik olduğu düzlem çalışma düzlemidir. Bizim tezgahımız için çalışma düzlemi şekilde görüldüğü üzere G17 düzlemidir. Tezgah kontrol ünitesinde G17 düzlemi “default” olarak seçili olduğundan çoğu uygulamada düzlem seçmeye gerek yoktur. Ergün KESKİN

13
G18 düzlemi X-Z düzlemidir.
G19 düzlemi Y-Z düzlemidir.

14
Ölçü Sisteminin Programlanması
G İnç ölçü sistemi G Milimetre ölçü sistemi G70 ve G71 komutları birbirlerini etkisiz hale getirirler Ergün KESKİN

15
Mutlak Ve Artışlı Programlama
Mutlak programlamada Ölçüler makine sıfır noktasına göre verilir. Artışlı programlamada Koordinat sisteminin merkezinin çakının ucunda olduğu kabul edilerek ölçüler yazılır. Ergün KESKİN

16
Mutlak Ve Artışlı Programlama
Ergün KESKİN

17
G0 Doğrusal Hızlı Hareket
G0 Komutuyla çakının pozisyonlama işlemleri gerçekleştirilir. Bu hareket ile talaş kaldırılmaz. Hareketin hızı tezgahın özelliklerine bağlıdır. Bizim tezgahımızda hızlı hareket 7.5 m/dakikadır. Komut Formatı G0 X… Y… Z… Ergün KESKİN

18
G1 Doğrusal Talaş Kaldırma Hareketi
G1 komutuyla doğrusal talaş kaldırma hareketleri programlanır. İlerleme “F” değeri girilmelidir. Komut Formatı G1 X… Y… Z… F… Ergün KESKİN

19
İlerleme Değerlerinin Girilmesi
G94 İlerleme mm/dakika cinsinden yazılır. Bu komut genellikle freze tezgahında kullanılır. G95 İlerleme mm/devir cinsinden yazılır. Bu komut genellikle torna tezgahında kullanılır. Ergün KESKİN

20
M Komutları M00 Programlanabilir stop
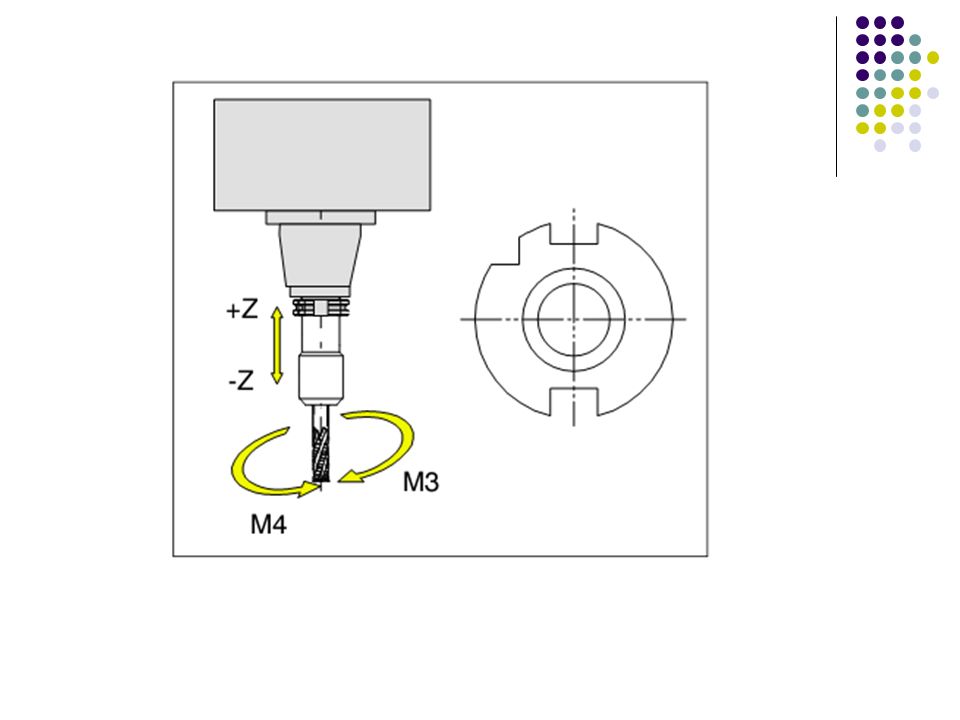
Bu komutun yazıldığı satırda program durur. İş mili soğutma sıvısı ve ilerleme durur. İstenirse makine kapısı açılabilir. ‘’NC START’’ tuşuna basıldığında program kaldığı yerden devam eder. M01 Şartlı programlanabilir stop Bu komutun M00 komutuyla aynı işlevi görür. Ancak bu komutun işlemesi için tuşunun basılı olması gereklidir. ‘’NC START’’ tuşuna basıldığında program kaldığı yerden devam eder. M03 İş mili dönüş yolu saat yönü İş mili üstten bakıldığında saat yönünde döner M04 İş mili dönüş yolu saat yönü tersi İş mili üstten bakıldığında saat yönünün tersi yönde döner Ergün KESKİN

21
Bu komutla iş mili frenlenerek durur. M06 Takım değiştirme
İş mili frenleme Bu komutla iş mili frenlenerek durur. M06 Takım değiştirme Takım değiştirilir. Bu komutla aynı satıra değiştirilecek takımın numarası yazılır. M08 Soğutma sıvısı açma Soğutma sıvısı program içinde herhangi bir yerde açılabilir. M09 Soğutma sıvısı kapama Soğutma sıvısı program içinde herhangi bir yerde kapatılabilir. M17 Alt program sonu Alt program sonlanarak program alt programa dallandığı satırın altındaki satırdan işlemeye devam eder. M30 Program sonu CNC programı sona erer. Takım, ilerleme ve soğutma sıvısı gibi bileşenler durur. CNC programı başa döner. Ergün KESKİN

23
“WinNC” programında simülasyon uygulamasında dikkat edilmesi gereken önemli noktalar.
Ergün KESKİN

24
Bu değerler “0” olmalıdır.
Parameter Workoffset menüsü altında programda kullanılan G54….57 offsetlerine ait “X”, “Y”, “Z” ölçülerinin “0” olması gerekir. Bu değerler “0” olmalıdır. Ergün KESKİN

25
Simulasyon yapılırken tezgah “JOG” modunda olmalıdır.
Simülasyonda tezgah “JOG” modunda olmalıdır Ergün KESKİN

26
“save/clear active part” tuşu
İş parçası ebatları ayarlandıktan sonra “save/clear active part” tuşuna tıklanarak güncellenen parça kaydedilmelidir. “save/clear active part” tuşu Ergün KESKİN

27
3DView----Tool menüsünden kullanılacak takım seçilmelidir.
Ergün KESKİN

28
Parameter---Tool offset menüsünden takım yarıçapı girilmelidir.
Kullanılacak takımın yarıçap değeri girilmelidir. Ergün KESKİN

29
Takımın M3 veya M4 ile dönmesini sağlamazsanız hata mesajı alırsınız.
Takım seçmeyi unutmayın. Aksi halde programınız çalışsa bile takımınız ekranda görünmeyeceğinden parça işlenemez. Takımın M3 veya M4 ile dönmesini sağlamazsanız hata mesajı alırsınız. Programda takım seçilirken “D” değeri mutlaka seçilmelidir. T1 D1 M6 G1 hareketlerinde mutlaka ilerleme “F” değerinin girilmesi gereklidir. Sayısal değerler girilirken «Caps Lock» tuşu basılı olmamalıdır. Ergün KESKİN

30
TAKIMLAR Twist drill Helisel matkap Start drill Havşa matkabı
Tap Kılavuz Endmill Parmak freze Chanfer mill Pah frezeleme çakısı Face mill Yüzey frezeleme çakısı Thread milling Vida açma frezesi Spherical cutter Küresel freze çakısı Disk milling cutter Tepsi freze çakısı Ergün KESKİN

31
Yukarıdaki parçanın üzerinde bulunan kanalı açacak programı yazınız.
İş Parçası Sıfır Noktası Yukarıdaki parçanın üzerinde bulunan kanalı açacak programı yazınız. Mutlak programlama kullanınız. Kütük Ölçüleri: 75X75X38 mm Takım: Çap 16 mm parmak freze Devir Sayısı: 2000 d/dak İlerleme: 150 m/dak Ergün KESKİN

32
Yukarıdaki parçanın çevresini frezeleyen programı yazınız.
Mutlak programlama kullanınız. Kütük Ölçüleri: 75X75X38 mm Takım: Çap 16 mm parmak freze Devir Sayısı: 2000 d/dak İlerleme değerleri: XY düzleminde 150 m/dak Z doğrultusunda 50 m/dak Ergün KESKİN

33
Takım Telafisi (G40-G41-G42)
")
34
Takım Telafisi (G41 Takım Solda)
Takım giderken arkasından takip ettiğini düşün takım iş parçasının solunda kalıyorsa “G41” komutu kullanılır. Ergün KESKİN

35
Takım Telafisi (G42 Takım Sağda)
Takım giderken arkasından takip ettiğini düşün takım iş parçasının sağında kalıyorsa “G42” komutu kullanılır. Ergün KESKİN

36
Ergün KESKİN

37
Takım Telafisi (G40-G41-G42) Kullanım Açıklamaları
G40 telafinin iptal edilmesi komutu yazıldıktan sonra G0 veya G1 komutları ile “X” veya “Y” ekseninde veya her iki eksende birden işten çıkma hareketi yazılmalıdır. Böylece çakı son gideceği konuma telafisiz gidecektir. G40 komutu G0 veya G1 komutuyla aynı satırda olabileceği gibi bir önceki satırda da olabilir. G41 ve G42 arasında geçiş yapabilmek için önce G40 ile telafi iptal edilmelidir. Ergün KESKİN

38
Ergün KESKİN

39
17 14 13 18 19 16 15 12 20 11 21 10 9 22 24 23 8 7 3 25 6 2 4 5 1 Ergün KESKİN

40
Ergün KESKİN

41
Ergün KESKİN

42
4 3 5 6 7 8 2 9 1 Ergün KESKİN

43
Ergün KESKİN

44
Ergün KESKİN

45
Pah Programlama Komut Formatı G1 X… Y… Z… CHF=… G1 X… Y… Z…
G1 X… Y… Z… CHR=… G1 X… Y… Z… Ergün KESKİN

46
Radyüs Programlama Komut Formatı G1 X… Y… Z… RND=5 G1 X… Y… Z…
Ergün KESKİN

47
Ergün KESKİN

48
Ergün KESKİN

49
Ergün KESKİN

50
Ergün KESKİN

51
Ergün KESKİN

52
Ergün KESKİN

53
Ergün KESKİN

54
Modal Radyüs Programlama
Bu komutta modal radyüs programlanır. Freze çakısı her döndüğü köşeyi yazılan modal radyüs kadar radyüsle döner. Böylece bir defa radyüs yazılması yeterli olur. Komut Formatı G1 X… Y… Z… RNDM=5 G1 X… Y… Z… Ergün KESKİN

55
Kullanılacak Takım: 4 mm lik parmak freze Devir Sayısı:1500d/dak
Aşağıdaki parçanın üzerine şekildeki kanalı frezeleyecek programı yazınız. Kullanılacak Takım: 4 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:100x100x45 mm XY düzleminde ilerleme hızı: 125 m/dak Z ekseninde ilerleme hızı: 50 m/dak Talaş derinliği:5 mm Ergün KESKİN

56
Ergün KESKİN

57
Ergün KESKİN

58
Ergün KESKİN

59
Aşağıdaki parçanın çevresini işleyecek programı yazınız.
Kullanılacak Takım: 20 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:130x85x35 mm XY düzleminde ilerleme hızı: 125 m/dak Z ekseninde ilerleme hızı: 50 m/dak Takım telafisi kullanılacaktır. Saat ibresi yönünde kesme yapınız. Ergün KESKİN

60
Ergün KESKİN

61
Polar Koordinatlarla G1 Doğrusal Talaş Kaldırma Hareketi
G110 Takımın en son bulunduğu noktaya göre kutup noktasının koordinatları G111 İş parçası sıfır noktasına göre kutup noktasının koordinatları G112 Geçerli son kutup noktasına göre yeni kutup noktasının koordinatları Komut Formatı G111 X30 Y40 Z0 G1 RP=40 AP=60 F300 G111 komutunda ilk önce “X” değeri yazıldığından “AP” değeri “X” ekseni 0º kabul edilerek yazılır. Ergün KESKİN

62
G111 İş parçası sıfır noktasına göre kutup noktasının koordinatları
G110 Takımın en son bulunduğu noktaya göre kutup noktasının koordinatları G111 İş parçası sıfır noktasına göre kutup noktasının koordinatları G112 Geçerli son kutup noktasına göre yeni kutup noktasının koordinatları Ergün KESKİN

63
Kullanılacak Takım: 4 mm lik parmak freze Devir Sayısı:1500d/dak
Aşağıdaki parçanın üzerine şekildeki gibi üçgen çizdirecek programı yazınız. Kullanılacak Takım: 4 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:100x100x45 mm XY düzleminde ilerleme hızı: 125 m/dak Z ekseninde ilerleme hızı: 50 m/dak Ergün KESKİN

64
Ergün KESKİN

65
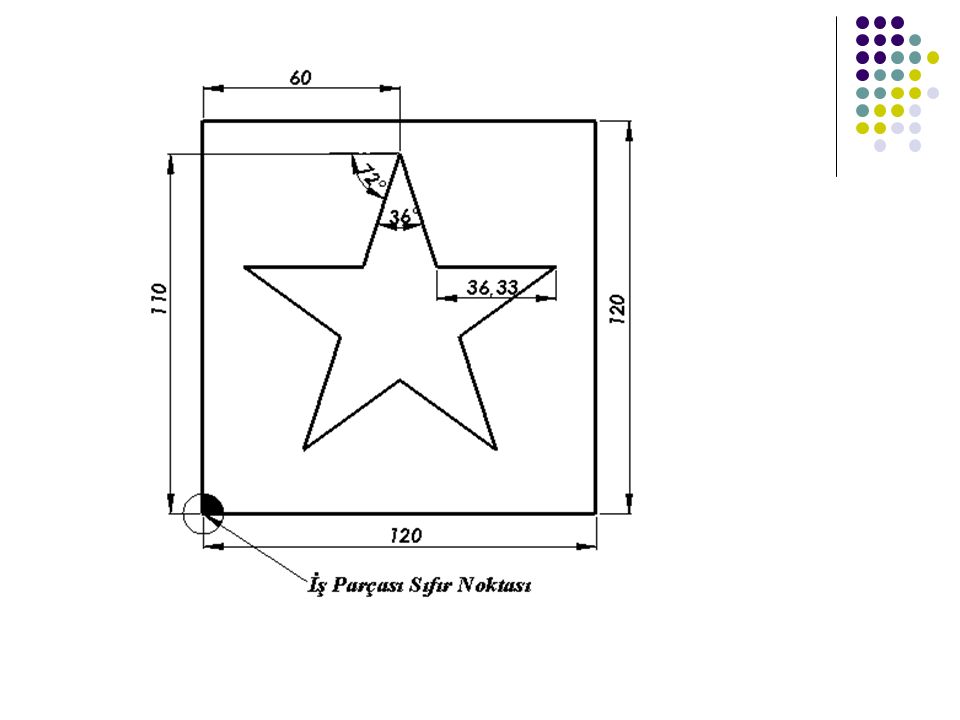
Aşağıdaki parçanın üzerine şekildeki gibi yıldızı çizdirecek programı yazınız.
Kullanılacak Takım: 3 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:120x120x45 mm İlerleme hızı: 150 m/dak

67
G54 G90 G71 G94 T1 D1 M6 M3 S1500 G0 X60 Y110 Z1 G1 Z-5 F100 G110 X0 Y0 G1 RP=36.33 AP=-72 G1 RP=36.33 AP=0 G1 RP=36.33 AP=-144 G1 RP=36.33 AP=144 G110 X0 Y0 G1 RP=36.33 AP=-144 G1 RP=36.33 AP=72 G1 RP=36.33 AP=144 G1 RP=36.33 AP=0 G1 X60 Y110 G0 Z50 M30

68
Ergün KESKİN

69
G2/G3 X… Z…I=AC(…) J=AC(…)
Başlangıç noktası, bitiş noktası ve merkez noktası kullanarak dairesel interpolasyon programlama Komut Formatı G2/G3 X… Y… I… J… Komut Formatı G2/G3 X… Z…I=AC(…) J=AC(…) Ergün KESKİN
 J=AC(…) Ergün KESKİN.")
70
X,Y → Hedef Nokta CR → Radyüs CR=- → Radyüs açısı>180º
Başlangıç noktası, bitiş noktası ve radyüs kullanarak dairesel interpolasyon programlama Komut Formatı G2/G3 X… Y… CR=±… Tam daire bu komutla programlanamaz X,Y → Hedef Nokta CR → Radyüs CR=- → Radyüs açısı>180º CR=+ → Radyüs açısı≤180º Ergün KESKİN

71
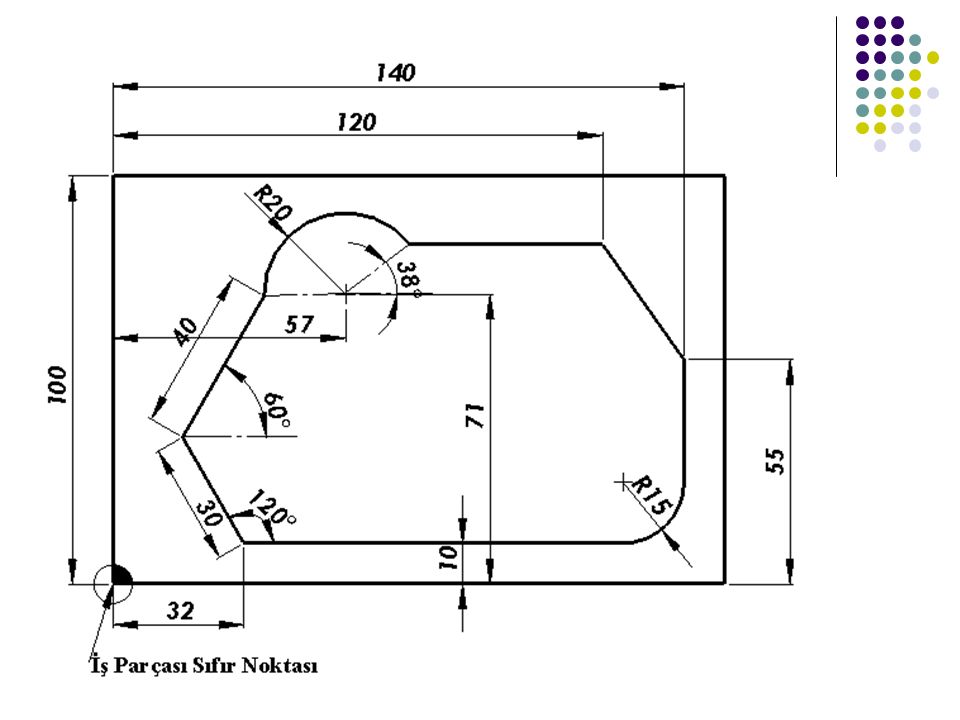
Aşağıdaki parçanın çevresini işleyecek programı yazınız.
Kullanılacak Takım: 16 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:130x85x35 mm XY düzleminde ilerleme hızı: 125 m/dak Z ekseninde ilerleme hızı: 50 m/dak Ergün KESKİN

72
Ergün KESKİN

73
Ergün KESKİN

74
G2/G3 KOMUTUNUN “CR” FORMATINI KULLANINIZ.
Aşağıdaki parçanın üzerine şekildeki gibi kanal açacak programı yazınız. Kullanılacak Takım: 4 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:100x100x45 mm Kanal derinliği: 5 mm XY düzleminde ilerleme hızı: 125 m/dak Z ekseninde ilerleme hızı: 50 m/dak G2/G3 KOMUTUNUN “CR” FORMATINI KULLANINIZ. Ergün KESKİN

75
Ergün KESKİN

76
Tam daire bu komutla programlanamaz
Başlangıç noktası, merkez noktası veya hedef nokta ve yayma açısı kullanarak dairesel interpolasyon programlama Komut Formatı G2/G3 X… Y… AR=… veya G2/G3 I… J… AR=… G2/G3 I=AC(…) J=AC(…) AR=… AR→ Yayma açısı Tam daire bu komutla programlanamaz Ergün KESKİN
 J=AC(…) AR=… AR→ Yayma açısı. Tam daire bu komutla programlanamaz. Ergün KESKİN.")
77
Aşağıdaki parçanın üzerine şekildeki gibi kanal açacak programı yazınız.
Kullanılacak Takım: 4 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:150x100x45 mm Kanal derinliği: 5 mm XY düzleminde ilerleme hızı: 125 m/dak Z ekseninde ilerleme hızı: 50 m/dak

79
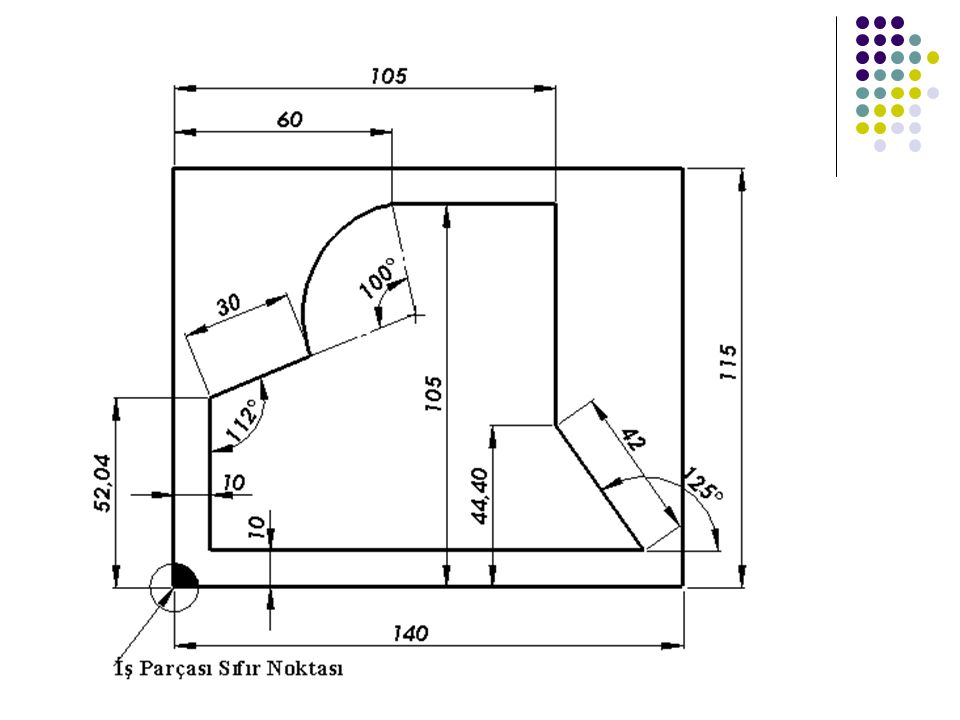
Aşağıdaki parçanın çevresini frezeleyecek programı yazınız.
Kullanılacak Takım: 10 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:140x115x45 mm talaş derinliği: 5 mm XY düzleminde ilerleme hızı: 125 m/dak Z ekseninde ilerleme hızı: 50 m/dak

81
Başlangıç noktası, ara nokta ve hedef nokta kullanarak dairesel interpolasyon programlama
Komut Formatı CIP X… Y… I1=… J1=… Komut Formatı CIP X… Y… I1=AC(…) J1=AC(…) I1= → Ara noktanın “X” ekseninde başlangıç noktasından uzaklığı J1= →Ara noktanın “Y” ekseninde başlangıç noktasından uzaklığı Ergün KESKİN
 J1=AC(…) I1= → Ara noktanın X ekseninde başlangıç noktasından uzaklığı. J1= →Ara noktanın Y ekseninde başlangıç noktasından uzaklığı. Ergün KESKİN.")
82
Polar koordinatlar kullanarak dairesel interpolasyon programlama
Komut Formatı G2/G3 AP=…RP=… AP → Son noktanın polar açısı RP → Polar radyüs Polar koordinatla dairesel interpolasyon programlamadan önce G110/G111 veya G112 komutlarından biriyl kutup noktası radyüsün merkezine taşınmalıdır. Ergün KESKİN

83
Kullanılacak Takım: 3 mm lik parmak freze Devir Sayısı:1500d/dak
Aşağıdaki parçanın üzerine şekildeki gibi kanal açacak programı yazınız. Kullanılacak Takım: 3 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:100x100x45 mm Kanal derinliği: 5 mm XY düzleminde ilerleme hızı: 125 m/dak Z ekseninde ilerleme hızı: 50 m/dak Ergün KESKİN

84
Ergün KESKİN

85
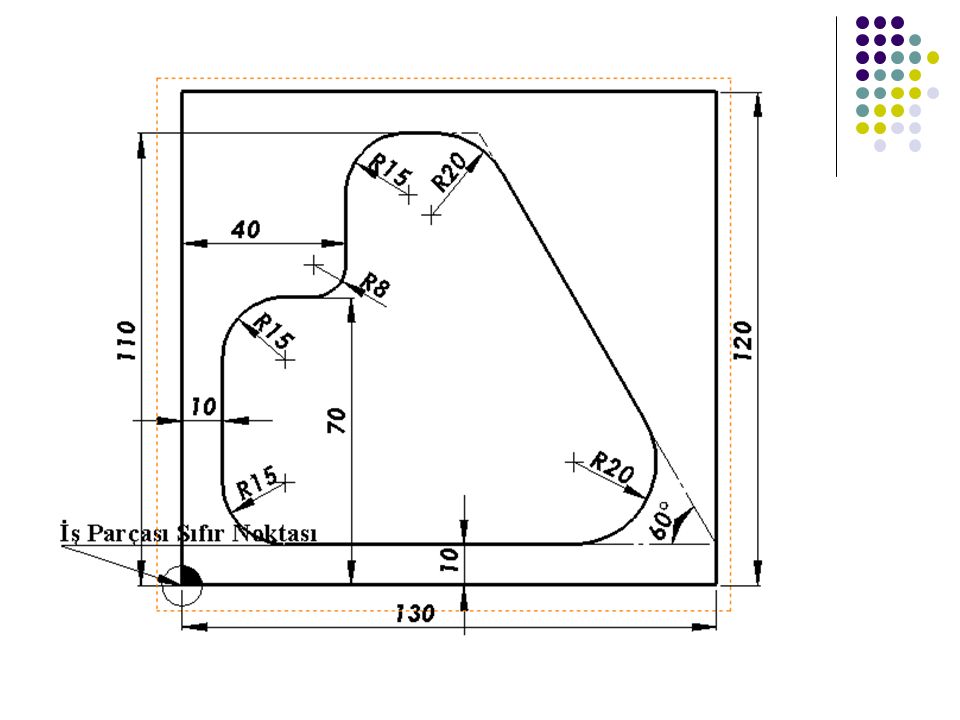
Aşağıdaki parçanın üzerine şekildeki gibi kanal açacak programı yazınız.
Kullanılacak Takım: 3 mm lik parmak freze Devir Sayısı:1500d/dak Ham Parça Ölçüleri:150x100x45 mm Kanal derinliği: 5 mm İlerleme hızı: 125 m/dak

89
Çalışma Alanı Limitinin Belirlenmesi
G25/26 X…Y… Z… Programlanabilir çalışma alanı sınırlandırması: Bu komutlar ile takımın hareket edeceği alan sınırlandırılır. Takım komutla yazılan sınırların dışına çıkamaz. G25 ve G26 ayrı komut satırlarında kullanılmalıdır. Ergün KESKİN

90
Çalışma Alanı Limitinin Belirlenmesi
G25 X…Y… Z… Alt çalışma alanı G26 X…Y… Z… Üst çalışma alanı WALIMON Çalışma limiti açık WALIMOF Çalışma limiti kapalı Ergün KESKİN

91
“Active”kısımları onaylanmadan çalışma alanı limiti aktif olmaz.
Ergün KESKİN

92
“parameter—setting data---Work area”
Program yazılırken çalışma alanı sınırlama komutları ilk satırlara yazılmalıdır. Böylece program çalışınca çalışma alanı limitleri “parameter—setting data---Work area” limit kısmına yazılır. Ergün KESKİN

93
Devir Sayısının Sınırlandırılması
G25 ve G26 kullanılarak devir sayısı sınırlandırılabilir. G25 S…. (En düşük devir sayısı) G26 S…. (En yüksek devir sayısı) G25 ve G26 komutlarında yazılan değerler “setting data” kısmında saklanır ve program kapatıldıktan sonra da aktif olmaya devam eder. Ergün KESKİN
 G26 S…. (En yüksek devir sayısı) G25 ve G26 komutlarında yazılan değerler setting data kısmında saklanır ve program kapatıldıktan sonra da aktif olmaya devam eder. Ergün KESKİN.")
94
DELİK DELME ÇEVRİMLERİ
CYCLE 81 “Delme Merkezleme” çevrimi CYCLE 82 “Delme Havşalama” çevrimi CYCLE 83 “Derin Delik Delme”Çevrimi DİKKAT Delik delme çevrimleri yazılmadan önce takım delik delinecek noktanın üzerine emniyetli bir mesafeye konumlandırılmalıdır. Ergün KESKİN

95
CYCLE 81 “Delme Merkezleme” çevrimi
Basit delme işlemlerinde kullanılır. Özellikle punta deliği veya büyük delikler öncesi ön deliklerin delinmesinde kullanılır. Delik sonunda talaşın temizlenmesi için bekleme süresi yoktur. Matkap delik sonuna ulaştığında hızlı hareketle geri çıkar. Retract plane:Geri çekilme düzlemi Ref.plane:Referans düzlemi Safety dist:Emniyet mesafesi Fin.dr.depth:Delik derinliği (mutlak) Depth incr:Delik derinliği (artışlı) Ergün KESKİN
 Depth incr:Delik derinliği (artışlı) Ergün KESKİN.")
96
CYCLE 82 “Delme Havşalama” çevrimi
Delme ve havşalama işlemlerinde kullanılır. Delik sonunda talaşın temizlenmesi için bekleme süresi verilerek delik dibinde elde edilen yüzey kalitesi artırılır. Retract plane:Geri çekilme düzlemi Ref.plane:Referans düzlemi Safety dist:Emniyet mesafesi Fin.dr.depth:Delik derinliği (mutlak) Depth incr:Delik derinliği (artışlı) Dwell time: Delik sonunda bekleme süresi (saniye olarak) Ergün KESKİN
 Depth incr:Delik derinliği (artışlı) Dwell time: Delik sonunda bekleme süresi (saniye olarak) Ergün KESKİN.")
97
CYCLE 83 “Derin Delik Delme”Çevrimi
CYCLE 83 iki tip derin delik delme operasyonuna sahiptir. Ergün KESKİN

98
VARI=0 Talaş Kırma Bu operasyon tipinde matkap referans düzlemine RFP kadar G0 hareketiyle yaklaşır. FDEP kadar iş parçasına G1 hareketiyle girerek delme işlemi yapar. DTP kadar bekler. (saniye cinsinden) 1mm G1 hareketiyle geri çıkar. DTS kadar bekler. (saniye cinsinden) FDEP-DAM miktarı kadar tekrar G1 hareketiyle işe girer. Bu çevrim delik sonuna ulaşılıncaya kadar devam eder. Delme derinliği minimum MDEP olabilir. Delme işlemi bittiğinde matkap RTP geri çekilme düzlemine çekilir. Ergün KESKİN
 1mm G1 hareketiyle geri çıkar. DTS kadar bekler. (saniye cinsinden) FDEP-DAM miktarı kadar tekrar G1 hareketiyle işe girer. Bu çevrim delik sonuna ulaşılıncaya kadar devam eder. Delme derinliği minimum MDEP olabilir. Delme işlemi bittiğinde matkap RTP geri çekilme düzlemine çekilir. Ergün KESKİN.")
99
VARI=1 Talaş Boşaltma Bu operasyon tipinde matkap referans düzlemine RFP kadar G0 hareketiyle yaklaşır. FDEP kadar iş parçasına G1 hareketiyle girerek delme işlemi yapar. DTP kadar bekler. (saniye cinsinden) Emniyet mesafesine SDIS kadar geri çekilerek talaşı boşaltır. DTS kadar bekler. (saniye cinsinden) Bir önceki deldiği derinliğe SDIS miktarı kadar G0 hareketiyle yaklaşır. FDEP-DAM miktarı kadar tekrar G1 hareketiyle işe girer. Bu çevrim delik sonuna ulaşılıncaya kadar devam eder. Delme derinliği minimum MDEP olabilir. Delme işlemi bittiğinde matkap RTP geri çekilme düzlemine çekilir. Ergün KESKİN
 Emniyet mesafesine SDIS kadar geri çekilerek talaşı boşaltır. DTS kadar bekler. (saniye cinsinden) Bir önceki deldiği derinliğe SDIS miktarı kadar G0 hareketiyle yaklaşır. FDEP-DAM miktarı kadar tekrar G1 hareketiyle işe girer. Bu çevrim delik sonuna ulaşılıncaya kadar devam eder. Delme derinliği minimum MDEP olabilir. Delme işlemi bittiğinde matkap RTP geri çekilme düzlemine çekilir. Ergün KESKİN.")
100
Ergün KESKİN

101
Ergün KESKİN

102
Retract plane RTP Geri çekilme düzlemi Ref.plane RFP Referans düzlemi
Safety dist SDIS Emniyet mesafesi Fin.dr.depth DP Delik derinliği (mutlak) Depth incr DPR Delik derinliği (artışlı) Drill dept_1 FDEP İlk delme derinliği Depth_1,incr FDPR İlk delme derinliği (artışlı) Degression DAM Her seferde delinecek derinlikteki azalma miktarı Dwell time DTB Her delme işlemi sonunda bekleme zamanıdır. Bu değer saniye cinsinden veya iş milinin dönme sayısı olarak verilir. DTB>0 ise saniye cinsinden DTB<0 ise dönme sayısı olarak Ergün KESKİN
 Depth incr DPR Delik derinliği (artışlı) Drill dept_1 FDEP İlk delme derinliği. Depth_1,incr FDPR İlk delme derinliği (artışlı) Degression DAM Her seferde delinecek derinlikteki azalma miktarı. Dwell time DTB Her delme işlemi sonunda bekleme zamanıdır. Bu değer saniye cinsinden veya iş milinin dönme sayısı olarak verilir. DTB>0 ise saniye cinsinden. DTB<0 ise dönme sayısı olarak. Ergün KESKİN.")
103
Dwell time DTS Matkabın geri çekildikten sonra bekleme süresi (saniye)
Feedr factor FRF İlerleme miktarındaki azalma oranıdır. Bu oran ile 1 arasında girilebilir. Bu değerle daha önceki satırlarda girilen ilerleme değeri çarpılarak yeni ilerleme değeri bulunur. Operation VARI Operasyon tipidir. Yukarıda açıklanmıştı. Axis AXN Çalışma eksenidir. AXN 1 delik X ekseninde AXN 2 delik Y ekseninde AXN 3 delik Z ekseninde Minumum depth MDEP Minumum delik delme derinliğidir. Her seferinde DAM kadar azalan delme derinliği minumum bu miktar kadar olabilir. Ergün KESKİN

104
Dwell time DTD En son delme işlemi sonunda bekleme zamanıdır.
Retract VRT Geri çekilme miktarıdır. Bu değer ‘0’ olduğunda geri çekilme miktarı 1mm dir. Sıfırdan büyük yazıldığında yazılan bu değer geçerlidir. Dwell time DTD En son delme işlemi sonunda bekleme zamanıdır. DTD>0 ise saniye cinsinden DTD<0 ise dönme sayısı cinsinden DTD=0 ise DTB deki değer kabul edilir. Yani matkap her delme işlemi sonunda ne kadar bekliyorsa en son delme işlemi sonunda o kadar bekler. Distance DIS1 VARI 1 işlemi için matkap talaşı boşalttıktan sonra tekrar delmek için hızlı hareketle bir önceki deldiği derinliğe indiğinde bırakacağı emniyet mesafesidir. DIS1>0 olursa buraya yazılan değer geçerli olur. DIS1<0 olursa otomatik olarak hesaplanır. Ergün KESKİN

105
CYCLE 71 YÜZEY FREZELEME ÇEVRİMİ
Ergün KESKİN

106
Ergün KESKİN

107
Retract plane RTP Geri çekilme düzlemi Ref.plane RFP Referans düzlemi
Safety dist SDIS Emniyet mesafesi Depth, abs. DP Delik derinliği (mutlak) Ref. point PA Frezelenecek yüzeyin X ekseninde başlangıç noktası Ref. point PO Frezelenecek yüzeyin Y ekseninde başlangıç noktası Length LENG Frezelenecek yüzeyin X eksenindeki boyu Length WID Frezelenecek yüzeyin Y eksenindeki boyu Angle STA Frezelenecek yüzeyin X ekseniyle yaptığı açı Infeed depth MID Bir seferde alınacak maksimum talaş miltarı Infeed width MIDA Yanal ilerleme miktarı Ergün KESKİN
 Ref. point PA Frezelenecek yüzeyin X ekseninde başlangıç noktası. Ref. point PO Frezelenecek yüzeyin Y ekseninde başlangıç noktası. Length LENG Frezelenecek yüzeyin X eksenindeki boyu. Length WID Frezelenecek yüzeyin Y eksenindeki boyu. Angle STA Frezelenecek yüzeyin X ekseniyle yaptığı açı. Infeed depth MID Bir seferde alınacak maksimum talaş miltarı. Infeed width MIDA Yanal ilerleme miktarı. Ergün KESKİN.")
108
Retrach. Path FDP Yana artış mesafesi
Fin. Allow FAD Son talaşa bırakılacak talaş miktar Feedr. Surface FFP1 Yüzey temizlemede kullanılacak ilerleme miktarı Operation VARI Frezeleme metodu Retract path FDP1 İleri artış mesafesi Ergün KESKİN

109
1 Son talaşa bırakılan talaş payına kadar frezeleme
VARI Operasyon Tipi Operasyon tipi iki basamaklı sayı olarak ifade edilir. Birinci rakam ve ikinci rakamın ifade ettiği operasyon tipleri aşağıda yazılmıştır. Buna göre VARI 12 yazıldığında Y ekseninde tek yönlü kaba frezeleme yapılacaktır. X ekseninde tek yönlü Y ekseninde tek yönlü X ekseninde çift yönlü Y ekseninde çift yönlü 1 Son talaşa bırakılan talaş payına kadar frezeleme 2 Sadece finish işlemi Ergün KESKİN

110
Ergün KESKİN

111
Aşağıda özellikleri verilen parçanın yüzeyini frezeleyecek programı yazınız Parça ölçüleri: 150*70*40 Yüzey frezeleme, toplam derinlik: 5 mm; Başlangıç noktası koordinatları: (0,0) İş bittikten sonra geri çekilme düzlemi: 50 mm Freze çakısı: 16 mm parmak freze; Devir sayısı: 1250 dev/dakika; İlerleme: 125 m/dakika; Yanal ilerleme: 10 mm ; Maksimum talaş derinliği: 2 mm; Operasyon tipi: X ekseninde çift yönlü; İleri artış miktarı: 20 mm; Yana artış miktarı: 10 mm; Emniyet mesafesi: 2 mm; Ergün KESKİN

112
İş parçası sıfır noktasının başka bir noktaya taşınması
İş parçası sıfır noktasının programlamada kolaylık sağlanması için iş parçası üzerindeki başka bir noktaya taşınması için kullanılır. Komut Formatı: TRANS X… Y… Ergün KESKİN

113
Komut Formatı: ATRANS X… Y…
TRANS komutuyla taşınan iş parçası sıfır noktasının yeni sıfır noktasına göre başka bir noktaya taşınması gerekli olduğu durumlarda ATRANS komutu kullanılır. ATRANS komutundan sonra TRANS komutuyla oluşturulan sıfır noktasına göre yeni sıfır noktasının X ve Y değerleri girilir. Komut Formatı: ATRANS X… Y… Ergün KESKİN

114
İş parçası sıfır noktasının döndürülmesi
İş parçası koordinat sisteminin X, Y veya Z ekseninde döndürülmesi gerektiği durumlarda kullanılır. Daha çok iş parçasının üzerinde bulunan açılı geometrilerin işlenmesinde kullanılır. Tezgahımızda XY düzleminde çalıştığımız için döndürme işlemi Z ekseninde yapılır. Komut Formatı: ROT Z… Koordinat sistemi döndürüldükten sonra ilave olarak yeniden döndürülmek istendiğinde AROT komutu kullanılır. Komut Formatı: AROT Z… Ergün KESKİN

115
Yanda iş parçası sıfır noktası ilk önce TRANS komutuyla yeni bir noktaya taşınmıştır. Daha sonra AROT komutu kullanılarak iş parçası sıfır noktası Z ekseninde döndürülerek açılı pozisyonda olan geometrinin programlanması kolaylaşmıştır. TRANS komutundan sonra ROT değil de AROT komutunun kullanılmasına dikkat ediniz. Daha önceden iş parçası sıfır noktasının taşınması ve döndürülmesi komutlarından herhangi biri kullanıldığında AROT veya ATRANS komutları kullanılmalıdır. Ergün KESKİN

116
TRANS VE ROT komutlarıyla ilgili uygulama
Yandaki parçanın üzerine 5 mm lik parmak freze çakısıyla 5 mm derinliğinde takım yolları oluşturulacaktır. Önce sol alttaki takım yolunu alt program kullanarak oluşturunuz. Daha sonra TRANS komutuyla sağ alttaki takım yolunu oluşturunuz. Daha sonra ATRANS ve AROT komutlarını kullanarak sağ üstteki takım yolunu oluşturunuz. Parça ölçüleri 150x150x40 mm dir. Devir sayısı 2500 d/dak, Z ekseninde ilerleme 125 mm/dak XY ekseninde 100 mm/dak olarak alınacaktır. Ergün KESKİN

117
SCALE Komutuyla ölçeklendirme
Bu komutla ölçeklendirme uygulanarak girilen ölçülerden daha büyük veya daha küçük boyutlarda takım yolu oluşturmak mümkündür. SCALE komutu X, Y ve Z ekseninde ayrı ayrı girilebilir. Ancak biz XY düzleminde çalıştığımızdan sadece X ve Y ekseninde SCALE ölçüsü gireceğiz. Böylece X ve Y ekseninde programladığımız ölçülerden girilen SCALE faktörü kadar büyük veya küçük takım yolları elde edeceğiz. Komut Formatı: SCALE X… Y… Komut Formatı: ASCALE X… Y… Ergün KESKİN

118
Ergün KESKİN SCALE UYGULAMASI Yukarıdaki programda N35 satırında iş parçası sıfır noktası (15,15) noktasına taşınmıştır. Daha sonra N40 satırında L10 olarak alt programla yazılan büyük kontur işlenmiştir. N45 satırında TRANS komutuyla iş parçası sıfır noktası (40,20) noktasına taşınarak N50 satırında ASCALE komutuyla X ekseninde 0.5 ve Y ekseninde 0.7 SCALE uygulanmıştır. Daha sonra L10 alt programı tekrar uygulanmıştır. Son satırda SCALE komutu boş olarak yazılarak ölçeklendirme sıfırlanmıştır. Ergün KESKİN
 noktasına taşınmıştır. Daha sonra N40 satırında L10 olarak alt programla yazılan büyük kontur işlenmiştir. N45 satırında TRANS komutuyla iş parçası sıfır noktası (40,20) noktasına taşınarak N50 satırında ASCALE komutuyla X ekseninde 0.5 ve Y ekseninde 0.7 SCALE uygulanmıştır. Daha sonra L10 alt programı tekrar uygulanmıştır. Son satırda SCALE komutu boş olarak yazılarak ölçeklendirme sıfırlanmıştır. Ergün KESKİN.")
119
MIRROR (aynalama) UYGULAMASI
MIRROR (aynalama ) komutu kullanılarak X veya Z ekseninde aynalama yapılabilir. Komut Formatı: MIRROR X0 MIRROR Y0 MIRROR X0 komutuyla yukarıdaki resimde görüldüğü gibi X ekseni boyunca aynalama yapılmıştır. Buradaki 0 değeri aynalama yapıldıktan sonra herhangi bir offset uygulanmayacağı anlamına gelir. Buraya örneğin 5 değeri yazılırsa ayrıca aynalanan geometri 5mm offsetlenir. MIRROR Y0 komutuyla ise Y ekseni boyunca aynalama yapmak mümkünüdür. Ergün KESKİN
 komutu kullanılarak X veya Z ekseninde aynalama yapılabilir. Komut Formatı: MIRROR X0. MIRROR Y0. MIRROR X0 komutuyla yukarıdaki resimde görüldüğü gibi X ekseni boyunca aynalama yapılmıştır. Buradaki 0 değeri aynalama yapıldıktan sonra herhangi bir offset uygulanmayacağı anlamına gelir. Buraya örneğin 5 değeri yazılırsa ayrıca aynalanan geometri 5mm offsetlenir. MIRROR Y0 komutuyla ise Y ekseni boyunca aynalama yapmak mümkünüdür. Ergün KESKİN.")
120
MIRROR UYGULAMASI N40 satırında L10 alt programı işlenerek üst sağdaki takım yolu oluşturulmuştur. N45 satırında X ekseni boyunca aynalama yapılmış ve N50 satırında üst sağdaki takım yolu oluşturulmuştur. N50 satırında L10 alt programı tekrar çağrılmış ve üst soldaki takım yolu oluşturulmuştur. N55 satırında Y ekseninde aynalama yapılmış ve N60 alt soldaki takım yolu oluşturulmuştur. N65 satırında Y ekseninde aynalama yapılmış ve N70 satırında alt sağdaki takım yolu oluşturulmuştur. Ergün KESKİN













 MOMENTİ>")










