Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
YMT 222 SAYISAL ANALİZ (Bölüm 4)
Prof. Dr. Asaf Varol Bahar Dönemi

2
Eğri Uydurma

3
4.1 Giriş Birçok mühendislik problemi, çözüm için bağımsız değişkenlerden oluşan fonksiyonlarına veya xi,yi, noktaları verilmiş veri gruplarına ihtiyaç duyarlar. Bu verileri sağlayacak polinomların katsayılarını bulunması, bu bölümde incelenecektir. Genelde fonksiyonlar polinomlara eğri uydurmak için kullanılır. Pn(x) = b0 + b1x + b2x bnxn (4.1.1) İlk kategoride veri noktalarının sayısına tamamen eşit (n+1). dereceden bir polinom uydurulmalıdır.
 = b0 + b1x + b2x bnxn (4.1.1) İlk kategoride veri noktalarının sayısına tamamen eşit (n+1). dereceden bir polinom uydurulmalıdır.")
4
4.1 Giriş(Devam) Bu prosedürde verilen bilgi noktalarında hata olmaması gerekir. Bu noktaların eğri üzerinde olmasını isteriz. n+1 den daha büyük eğriyle ifade edilen bilgi noktalarının sayısı 2 kategoriyi oluşturur. Bütün bilgi noktalarının arasından n. dereceli polinoma geçiş mümkün değildir. 2 alternatif vardır.1.si bazı hata vektörlerini ve bu hatada bilgi noktaları ve eğri üzerindeki uygun noktalar arasındaki farkı tanımlar. 2. alternatif de, verilen bilgi noktalarının alt kümeler arasında bir polinoma geçmeye ve bu noktaların toplamından eğri oluşturmaya yarar.

5
4.2 Tam Polinomal Uydurma Verilen (n+1) noktanın: (x0, y0), (x1, y1), (x2, y2), … (xn, yn), bu noktadan geçen ve n. derecede olan benzer bir polinom daha vardır. y = Pn(x) = b0 + b1x + b2x2 + … + bn xn (4.2.1) Bu katsayılar b0, b1, b2, … bn lineer denklem eşitliklerinin çözümü ile sağlanabilir. b0 + b1x0 + b2x02 + … +bnx0n = y0 b0 + b1x1 + b2x12 + … +bnx1n = y1 b0 + b1x2 + b2x22 + … +bnx2n = y (4.2.2) … b0 + b1xn + b2xn2 + … +bnxnn = yn Matris formatında şöyle yazılabilir. [A]{B} = {Y} (4.2.3) [A] matrisinin elemanları şöyle atanır: aij = (xi-1)j-1 i = 1, 2, 3, …, n + 1 (4.2.4) j = 1, 2, 3,…, n + 1
 noktanın: (x0, y0), (x1, y1), (x2, y2), … (xn, yn), bu noktadan geçen ve n. derecede olan benzer bir polinom daha vardır. y = Pn(x) = b0 + b1x + b2x2 + … + bn xn (4.2.1) Bu katsayılar b0, b1, b2, … bn lineer denklem eşitliklerinin çözümü ile sağlanabilir. b0 + b1x0 + b2x02 + … +bnx0n = y0 b0 + b1x1 + b2x12 + … +bnx1n = y1 b0 + b1x2 + b2x22 + … +bnx2n = y (4.2.2) … b0 + b1xn + b2xn2 + … +bnxnn = yn Matris formatında şöyle yazılabilir. [A]{B} = {Y} (4.2.3) [A] matrisinin elemanları şöyle atanır: aij = (xi-1)j-1 i = 1, 2, 3, …, n + 1 (4.2.4) j = 1, 2, 3,…, n + 1")
6
Örnek E4.2.1 3. derecedeki polinomun hangi noktalardan geçtiğini karşılaştırınız Çözüm: Verilen bu değerler eşitlik yerine yazılırsa bunlar elde edilir: b0 + b1(0) + b2(0) + b3(0) = 1 b0 + b1(1) + b2(1) + b3(1) = = b0 + b1(2) + b2(4) + b3(8) = 1 b0 + b1(3) + b2(9) + b3(27) = 0 Bu lineer sistem eşitlikleri LU ayrıştırılması ile çözülür. b0 = 1.0 , b1 = , b2 = 3.0 , b3 = (-10/3) (-2/3) Polinomal sonuç ise: y = 1- (10/3)x + 3x2 - (2/3)x3
 + b2(0) + b3(0) = 1. b0 + b1(1) + b2(1) + b3(1) = 0 = b0 + b1(2) + b2(4) + b3(8) = 1. b0 + b1(3) + b2(9) + b3(27) = 0. Bu lineer sistem eşitlikleri LU ayrıştırılması ile çözülür. b0 = 1.0 , b1 = , b2 = 3.0 , b3 = (-10/3) (-2/3) Polinomal sonuç ise: y = 1- (10/3)x + 3x2 - (2/3)x3.")
7
Lagrange Polinomları Atama (4.2.5) Örneğin; n = 2, (4.2.6a) (4.2.6b)
Örneğin; n = 2, (4.2.6a) (4.2.6b) (4.2.6c)
 (4.2.6b) (4.2.6c)")
8
(n+1) noktasından geçen n
(n+1) noktasından geçen n. dereceli Lagrange polinomu şöyle ifade edilir: (4.2.7) Burada Lin(x) denklem de verilmiştir ve yi = f(xi) ‘ler verilen fonksiyonda x = xi ‘ye denk olan değerlerdir.
 noktasından geçen n. dereceli Lagrange polinomu şöyle ifade edilir: (4.2.7) Burada Lin(x) denklem de verilmiştir ve yi = f(xi) ‘ler verilen fonksiyonda x = xi ‘ye denk olan değerlerdir.")
9
Örnek E4.2.2 (0, 1); (1, 0); (2, 1); (3, 0) noktalarından geçen ve 3. derecede olan Lagrange polinomunu gösteriniz. Bu noktalar örnek 4.2.1’de verilmiştir: Çözüm: L03(x) = = = - (x-1)(x-2)(x-3) L13(x) = = = (x)(x-2)(x-3) L23(x) = = = - (x)(x-1)(x-3) L33(x) = = = (x)(x-1)(x-2)
; (1, 0); (2, 1); (3, 0) noktalarından geçen ve 3. derecede olan Lagrange polinomunu gösteriniz. Bu noktalar örnek 4.2.1’de verilmiştir: Çözüm: L03(x) = = = - (x-1)(x-2)(x-3) L13(x) = = = (x)(x-2)(x-3) L23(x) = = = - (x)(x-1)(x-3) L33(x) = = = (x)(x-1)(x-2)")
10
3. Derecede polinom aynı zamanda şöyle de bulunabilir,
= (1)(-1/6)(x - 1)(x - 2)(x - 3) (1) (-1/2)x(x - 1)(x - 3) + 0 veya L3(x) = -1/6(x - 1)(x - 2)(x - 3) – 1/2x(x - 1)(x - 3) Bulunan bu cevabın, örnek 4.2.1’de doğrudan metot kullanarak elde edilen cevap ile aynı olduğunun, okuyucular tarafından gösterilmesi istenilmiştir.
(-1/6)(x - 1)(x - 2)(x - 3) (1) (-1/2)x(x - 1)(x - 3) + 0. veya. L3(x) = -1/6(x - 1)(x - 2)(x - 3) – 1/2x(x - 1)(x - 3) Bulunan bu cevabın, örnek 4.2.1’de doğrudan metot kullanarak elde edilen cevap ile aynı olduğunun, okuyucular tarafından gösterilmesi istenilmiştir.")
11
Newton Polinomları Küçük bir veri kümesinden polinom oluşturmanın diğer bir yolu ise Newtonun bölünmüş farklar polinomudur. y = f(x) = b0 + b1(x - x0) + b2(x - x0)(x - x1) +…+ bn(x - x0)(x - x1)…(x - xn-1) (4.2.8) Verilen (n+1) veri noktaları (x0, y0), (x1, y1)…(xn, yn). bi (i = 0, 1, 2, … , n) katsayıları sonlu bölünmüş farklar formülü ile elde edilir. Bölünmüş farkları şöyle tanımlarsak: y[x0, x1] = (y1 - y0)/(x1 - x0) (4.2.9a) y[x1, x2] = (y2 – y1)/(x2 – x1) (4.2.9b)
 = b0 + b1(x - x0) + b2(x - x0)(x - x1) +…+ bn(x - x0)(x - x1)…(x - xn-1) (4.2.8) Verilen (n+1) veri noktaları (x0, y0), (x1, y1)…(xn, yn). bi (i = 0, 1, 2, … , n) katsayıları sonlu bölünmüş farklar formülü ile elde edilir. Bölünmüş farkları şöyle tanımlarsak: y[x0, x1] = (y1 - y0)/(x1 - x0) (4.2.9a) y[x1, x2] = (y2 – y1)/(x2 – x1) (4.2.9b)")
12
y[x1, x2, x3, x4] = benzer şekilde . . .
(4.2.9c) y[x1, x2, x3, x4] = benzer şekilde . . . Newton polinomunun katsayıları şöyle verilmiştir: b0 = y0 b1 = y[x0, x1] b2 = y[x0, x1, x2] (4.2.10) . . bn = y[x0, x1,…, xn] Bir sonraki örnekte de gösterildiği gibi bölünmüş farklar tablosu hazırlanarak işlemler sadeleştirilebilir.
![y[x1, x2, x3, x4] = benzer şekilde](http://slideplayer.biz.tr/slide/3152630/11/images/12/y%5Bx1%2C+x2%2C+x3%2C+x4%5D+%3D+benzer+%C5%9Fekilde.jpg "(4.2.9c) y[x1, x2, x3, x4] = benzer şekilde Newton polinomunun katsayıları şöyle verilmiştir: b0 = y0. b1 = y[x0, x1] b2 = y[x0, x1, x2] (4.2.10) . . bn = y[x0, x1,…, xn] Bir sonraki örnekte de gösterildiği gibi bölünmüş farklar tablosu hazırlanarak işlemler sadeleştirilebilir.")
13
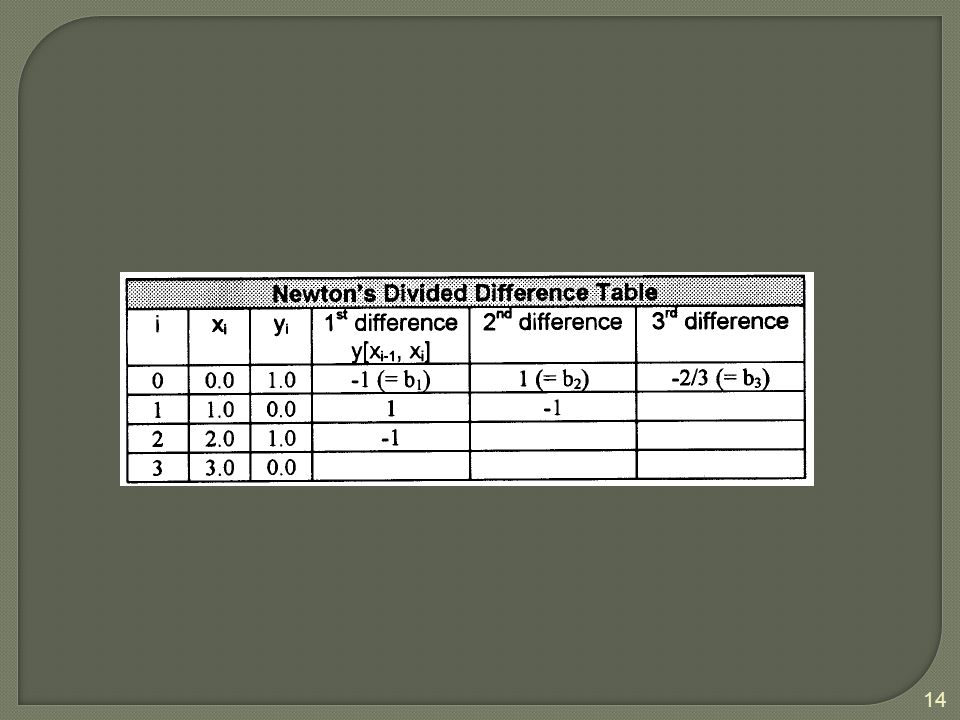
Örnek 4.2.3 (0,1); (1, 0); (2, 1); (3, 0), noktalarından geçen 3.dereceden Newton polinomunun bulunması. Örnek: ve Çözüm: Denklem ’da verilen eşitliği oluşturunuz. Katsayılar, bölünmüş farkların en üst satırına eşittir. Böylece; f(x) = 1- (x - 0) + (x - 0)(x - 1) -2/3(x - 0)(x - 1)(x - 2) veya f(x) = 1-x + x(x - 1) - 2/3x(x - 1)(x - 2) İlgili kişiler bu polinomun örnek 4.1.2’de elde edilen polinomla aynı olduğuna bakabilirler.
 = 1- (x - 0) + (x - 0)(x - 1) -2/3(x - 0)(x - 1)(x - 2) veya. f(x) = 1-x + x(x - 1) - 2/3x(x - 1)(x - 2) İlgili kişiler bu polinomun örnek 4.1.2’de elde edilen polinomla aynı olduğuna bakabilirler.")
15
4.3 En Küçük Kareler Regrasyonu
Lineer Regrasyon Tablo 4.3.1’de verilen veri grubu küçük bir kasabada yaşlarında bulunan insanlar için rasgele alınmış veriler olsun.

16
h = a + bw w = c + dh Figür Küçük bir kasaba için uzunluk ve ağırlık dağılımı En küçük kareler regresyon hata vektörü Ei bileşenlerin karelerinin toplamının minimizasyonu için kullanılan bir yöntemdir.

17
Ewi = wi - (c + dhi) ; i = 1, 2, 3, ..., N (4.3.4b)
(i) Örneğin W’de hiç hata olmadığını düşünün, böylece fonksiyon şöyle minimize edilir : (4.3.3a) h’deki her bir hata şöyle ifade edilir : Ehi = hi - (a + bwi) ; i = 1, 2, 3, ..., N (4.3.3b) (ii) h’de hiç hata olmadığını varsayın, böylece fonksiyon şöyle ifade edilir. (4.3.4) W’nin her bir noktasındaki hata şöyle hesaplanır: Ewi = wi - (c + dhi) ; i = 1, 2, 3, ..., N (4.3.4b)
 Örneğin W’de hiç hata olmadığını düşünün, böylece fonksiyon şöyle minimize edilir : (4.3.3a) h’deki her bir hata şöyle ifade edilir : Ehi = hi - (a + bwi) ; i = 1, 2, 3, ..., N (4.3.3b) (ii) h’de hiç hata olmadığını varsayın, böylece fonksiyon şöyle ifade edilir. (4.3.4) W’nin her bir noktasındaki hata şöyle hesaplanır: Ewi = wi - (c + dhi) ; i = 1, 2, 3, ..., N (4.3.4b)")
18
Devam (iii)Varsayalım ki her iki değişken de hata içersin. Bu durumda h ve w deki kombine hatalarının toplamlarını minimize edeceğiz. Eğer denklem in içerdiği w, çözersek: w = -(a/b) +(1/b)h (4.3.5) Eğer h ve w verilen hatalar ağırlığa eşit (veya önemli) ise aşağıda verilen fonksiyonun minimize edilebileceği söylenebilir : (4.3.6) Denklem & 4.3.4, ile verilen Sh or Sw minimizasyonu her biri açıkça göstermektedir. Diğer tarafta Shw üstündeki minimizasyon önemli başlıklardır.
Varsayalım ki her iki değişken de hata içersin. Bu durumda h ve w deki kombine hatalarının toplamlarını minimize edeceğiz. Eğer denklem in içerdiği w, çözersek: w = -(a/b) +(1/b)h (4.3.5) Eğer h ve w verilen hatalar ağırlığa eşit (veya önemli) ise aşağıda verilen fonksiyonun minimize edilebileceği söylenebilir : (4.3.6) Denklem & 4.3.4, ile verilen Sh or Sw minimizasyonu her biri açıkça göstermektedir. Diğer tarafta Shw üstündeki minimizasyon önemli başlıklardır.")
19
Devam Fakat ilk olarak doğrusal regrasyonu genel x ve y değişkenlerinin terimleriyle formüle edelim. y = a0 + a1x (4.3.7) ve (4.3.8) S minimumu bulurken ilk a0 türevi alınarak ise a1 ve bunları sıfıra eşitlersek (4.3.9a) (4.3.9b) Açıklama: EQS noktasında S fonksiyonu gösterilebilir a & b S minimuma sahiptir (maksimum değildir). Bu da denklem de gösterilen a0 ve a1 gözlenen S nin minimum çözümlerine uygundur.
 ve. (4.3.8) S minimumu bulurken ilk a0 türevi alınarak ise a1 ve bunları sıfıra eşitlersek. (4.3.9a) (4.3.9b) Açıklama: EQS noktasında S fonksiyonu gösterilebilir a & b S minimuma sahiptir (maksimum değildir). Bu da denklem de gösterilen a0 ve a1 gözlenen S nin minimum çözümlerine uygundur.")
20
Devam Denklem a & b yeniden düzenlersek ve basitleştirirsek Na0 + (xi)a1 = y (4.3.10a) (xi)a0 + (xi2)a1 = xiyi (4.3.10b) Burada i = 1 den N kadar tümünü özetleyelim. Bu iki denklem a0 ve a1 katsayılarına karar vermek için yeterlidir. N = 7 ; (xi) = ; (yi) = ; (xi2) = ; (xi yi) = 30.0 Bundan dolayı denklemler kümelenerek çözülebilir.: 7a a1 = a0 = -1.0 -2.0a a = a1 = 0.5
a1 = y (4.3.10a) (xi)a0 + (xi2)a1 = xiyi (4.3.10b) Burada i = 1 den N kadar tümünü özetleyelim. Bu iki denklem a0 ve a1 katsayılarına karar vermek için yeterlidir. N = 7 ; (xi) = -2.0 ; (yi) = -8.0 ; (xi2) = 56.0 ; (xi yi) = Bundan dolayı denklemler kümelenerek çözülebilir.: 7a a1 = a0 = a a1 = 30.0 a1 = 0.5.")
21
Örnek E4.2.4 Tablo de verilen veriler düz bir doğruya uygundur, ilk olarak w (ağırlık) değerlerinde hata olmadığını varsayalım ve (yükseklik) değerlerinde de hata yok ise her iki denklemin sonuçlarını karşılaştıralım Çözüm: Tablo den: N = 11 ; (hi) = ; (wi) = 775 ; (hi2) = ; (wi2) = 55,131 ; (hiwi) = 1, Denklemler h = a + bw için çözülürse x = w, y = h, a0 = a içerir ve denklem a & b deki a1 = b 11a + 775b = a + 55,131b = 1, Çözümler: a = 0.768; b = Bu yüzden, h = w
 değerlerinde hata olmadığını varsayalım ve (yükseklik) değerlerinde de hata yok ise her iki denklemin sonuçlarını karşılaştıralım Çözüm: Tablo den: N = 11 ; (hi) = ; (wi) = 775 ; (hi2) = ; (wi2) = 55,131 ; (hiwi) = 1, Denklemler h = a + bw için çözülürse x = w, y = h, a0 = a içerir ve denklem a & b deki a1 = b 11a + 775b = a + 55,131b = 1, Çözümler: a = 0.768; b = Bu yüzden, h = w")
22
Devam Denklemler w = c + d h için çözülürse denklem a & b de x = h, y = w, a0 = c, a1 = d içerir. 11c d = c d = 1, Çözümler: c = ; d = Bu yüzden, w = h iki durumdaki sonuçları karşılaştırırsak h = a + bw için: w = -(a/b) + (1/b)h Eğer w de hata yoksa c = -(a/b) = ve d = (1/b) = 75.19, farklı anlamlı basamakla bulduğumuzu varsayalım w değerleri hataya sahiptir fakat h değeri değildir. Doğru cevaplar bunların arasında bir yerde olmalıdır.
 + (1/b)h Eğer w de hata yoksa c = -(a/b) = ve d = (1/b) = 75.19, farklı anlamlı basamakla bulduğumuzu varsayalım w değerleri hataya sahiptir fakat h değeri değildir. Doğru cevaplar bunların arasında bir yerde olmalıdır.")
23
Devam (a, b) ve (c, d) değerlerinin her ikisinin verilen ağırlıkları eşit verilmiştir. Denklem & kenarına ekleme yoluyla h çözülebilir: h = [(a-c)/(1+d)] + [(1+b)/(1+d)]w h = w veya w = h doğrusal olmayan analizi kullanarak problemleri çözebiliriz. Burada hatanın kareleri toplamını minimum yapmaya ihtiyaç duyarız Ei2 = [Ehi2 + Ewi2]1/2.
 ve (c, d) değerlerinin her ikisinin verilen ağırlıkları eşit verilmiştir. Denklem & kenarına ekleme yoluyla h çözülebilir: h = [(a-c)/(1+d)] + [(1+b)/(1+d)]w h = w veya w = h doğrusal olmayan analizi kullanarak problemleri çözebiliriz. Burada hatanın kareleri toplamını minimum yapmaya ihtiyaç duyarız Ei2 = [Ehi2 + Ewi2]1/2.")
24
Pseudo Doğrusal Olmayan Regresyon
Üssel ve güç kural fonksiyonlarının formu y = a ebx ; y = a xb (4.3.11) Ölçülen bu tahmini veriler genellikle mühendislikte kullanılır. Örneğin denklem (4.3.11) verilen basit üstel eğriye uydurma yoluyla hata fonksiyonunun minimizasyonuna ihtiyaç duyulur. S(a,b) = [ yi -( a ebxi) ] 2 (4.3.13) S in türevi alınarak a ve b sıfıra eşit ise aşağıdaki doğrusal olmayan denklemler kullanılarak a ve b parametrelerine karar verilebilir. [ yi -( a ebxi) ] (-2 ebxi) = 0 (4.3.14a) [ yi -( a ebxi) ] (-2axiebxi ) = 0 (4.3.14b) Denklemler basitçe a zi2 = zi yi (4.3.15a) a xi zi2 = xi zi yi (4.3.15b) burada zi = ebxi (4.3.15c)
 Ölçülen bu tahmini veriler genellikle mühendislikte kullanılır. Örneğin denklem (4.3.11) verilen basit üstel eğriye uydurma yoluyla hata fonksiyonunun minimizasyonuna ihtiyaç duyulur. S(a,b) = [ yi -( a ebxi) ] 2 (4.3.13) S in türevi alınarak a ve b sıfıra eşit ise aşağıdaki doğrusal olmayan denklemler kullanılarak a ve b parametrelerine karar verilebilir. [ yi -( a ebxi) ] (-2 ebxi) = 0 (4.3.14a) [ yi -( a ebxi) ] (-2axiebxi ) = 0 (4.3.14b) Denklemler basitçe. a zi2 = zi yi (4.3.15a) a xi zi2 = xi zi yi (4.3.15b) burada. zi = ebxi (4.3.15c)")
25
Devam Denklem (4.3.11) verilen üstel fonksiyon gözlenerek problemi basitleştirmek isteriz. Doğrusallaştırma için her iki tarafın doğal logaritmasını alırsak. ln(y) = ln(a) +b x (4.3.16a) yeni değişkenler tanımlayarak y* = ln(y); a* = ln(a); b*=b; x*=x Bu yüzden y* = a* + b* x* (4.3.16b) Bu pseudo doğrusal olmayan regresyon olarak adlandırılır.
 verilen üstel fonksiyon gözlenerek problemi basitleştirmek isteriz. Doğrusallaştırma için her iki tarafın doğal logaritmasını alırsak. ln(y) = ln(a) +b x (4.3.16a) yeni değişkenler tanımlayarak y* = ln(y); a* = ln(a); b*=b; x*=x Bu yüzden y* = a* + b* x* (4.3.16b) Bu pseudo doğrusal olmayan regresyon olarak adlandırılır.")
26
Örnek E4.3.2 Denklem (4.3.11) verilen verilerin üstel fonksiyonu uydurmak için pseudo doğrusal olmayan metot kullanılır. Direk doğrusal olmayan metot kullanılarak denklem a&b nin içerdiği a ve b parametreleri için sonuçlar karşılaştırılır. y = a ebx i: x: y: Her iki tarafın doğal logaritması alınarak ln(y) = ln (a) + b x “y* = ln(y); a* = ln(a); b* = b, ve x* = x, değişken dönüşümü ile tablo değiştirilse i: x*: y*: N = 7; x*i = 8.45; (x*i)2 = ; y*i = ; (x*i y*i ) =
 verilen verilerin üstel fonksiyonu uydurmak için pseudo doğrusal olmayan metot kullanılır. Direk doğrusal olmayan metot kullanılarak denklem a&b nin içerdiği a ve b parametreleri için sonuçlar karşılaştırılır. y = a ebx i: x: y: Her iki tarafın doğal logaritması alınarak ln(y) = ln (a) + b x y* = ln(y); a* = ln(a); b* = b, ve x* = x, değişken dönüşümü ile tablo değiştirilse i: x*: y*: N = 7; x*i = 8.45; (x*i)2 = ; y*i = ; (x*i y*i ) =")
27
Devam Denklemler çözülürse 7 a* b* = a* b* = Çözümler a* = ; b* = Şimdi geri dönüşümle orijinal parametreler hesaplanabilir. a = exp(a*) = , b = b* = İstenen eğri: y = exp( x ) Tüm doğrusal olmayan regresyon çözümleri denklem a,b,&c metotları kullanılarak çözülebilir (ikiye bölme metodu) bölüm 2 ye bakın. Doğrusal olmayan regresyon çözümleri: a = ; b=
 = , b = b* = İstenen eğri: y = exp( x ) Tüm doğrusal olmayan regresyon çözümleri denklem a,b,&c metotları kullanılarak çözülebilir (ikiye bölme metodu) bölüm 2 ye bakın. Doğrusal olmayan regresyon çözümleri: a = ; b=")
28
Devam Ei2 = 2.70E-03 tam doğrusal olmayan regresyon için
Tablo iki çözümün karşılaştırılması. Hataların karelerinin toplamları: Ei2 = 2.75E-03 pseudo doğrusal olmayan regresyon için Ei2 = 2.70E-03 tam doğrusal olmayan regresyon için

29
Doğrusallaştırma Verilen fonksiyonu isteğe bağlı olarak doğrusallaştırmak için genel bir prosedür bulmak mümkün değildir fakat mühendislik uygulamalarında fonksiyonların birkaç yaygın kullanımı doğrusal fonksiyonlar içeren tabu formlarıdır. * Not: ln(A + B) lnA + lnB, fakat ln(AB) = lnA + lnB; ln(Ab) = b lnA
 lnA + lnB, fakat ln(AB) = lnA + lnB; ln(Ab) = b lnA")
30
İteratif Regresyon Farz edelim y = a + bxm (4.3.18) . Doğrusallaştırmada ln(y-a) = ln(b) + m ln(x) (4.3.19) y* = ln(y-a), a0 = ln(b), a1 = m, x* = x Burada “a” bulunan fonksiyonun kesişimidir. ( y = a yanında x = 0 için m > 0) bu durumda en iyi kullanım iteratif prosedürdür: ilk olarak “a” nın tahmin değerine bağlı olarak b ve m ye karar verilir. Sonra hataların kareleri toplamını minimum yapmaya çalışılır. Eğer “a” nın değeri değişmiyorsa hata fonksiyonu minimize edilene kadar işlemler tekrarlanır.
 . Doğrusallaştırmada ln(y-a) = ln(b) + m ln(x) (4.3.19) y* = ln(y-a), a0 = ln(b), a1 = m, x* = x Burada a bulunan fonksiyonun kesişimidir. ( y = a yanında x = 0 için m > 0) bu durumda en iyi kullanım iteratif prosedürdür: ilk olarak a nın tahmin değerine bağlı olarak b ve m ye karar verilir. Sonra hataların kareleri toplamını minimum yapmaya çalışılır. Eğer a nın değeri değişmiyorsa hata fonksiyonu minimize edilene kadar işlemler tekrarlanır.")
31
4.4 Polinomal Regresyon Burada,verilen herhangi bir m polinomal derecesinin doğrusal regrasyonu için bölüm 4.3 te sunulan prosedürü genelleyeceğiz. (4.4.1) Kısaca 2. derece polinomlar için denklem türetelim daha sonra genel olarak uzatalım. Verilen ikinci derece polinomla; (4.4.2) Hataların kareleri toplamı tanımlanırsa (4.4.3) burada N verilen noktaların toplam sayısıdır.
 Kısaca 2. derece polinomlar için denklem türetelim daha sonra genel olarak uzatalım. Verilen ikinci derece polinomla; (4.4.2) Hataların kareleri toplamı tanımlanırsa (4.4.3) burada N verilen noktaların toplam sayısıdır.")
32
Devam S hata fonksiyonunun minimumuma karar vermek için aşağıdaki denklemler çözülürse; (4.4.4a) (4.4.4b) (4.4.4c)
 (4.4.4b) (4.4.4c)")
33
Devam m dereceden polinom için (m+1) denklem vardır ve toplu matris formunda yazarsak; (4.4.5)
")
34
Örnek E4.4.1 Verilere uygun kübik polinom örnek . E4.3.2.de verilmiştir Çözüm: Aşağıdaki denklem grubu POLYREG programı kullanılarak elde edilmiştir a a a a3 = a a a a3 = a a a a3 = a a a a3 = Bunun çözümü a0 = ; a1 = ; a2 = ; a3 = Kübik polinomdan elde edilen sonuçlar güncel vereilerle karşılaştırılmıştır. Bunun sonuçlarının çok iyi olduğu görülmektedir. Hata karelerinin toplamı üslü sayılarda daha azdır (Örnekte görülür E4.3.2). Dolayısıyla bir kübik polinom bu sorun için iyi bir seçim olacaktır.
. Dolayısıyla bir kübik polinom bu sorun için iyi bir seçim olacaktır.")
35
Devam

36
4.5 Çok Boyutlu Doğrusal Regresyon
Kısaca ifade edersek örnekte sadece iki bağımsız değişken dikkate alınmalıdır ; F = F(x,y); e.g. F(x,y) = a + bx + cy (4.5.1) Veri noktaları kümesini verilen (4.5.1) formunun en küçük karesine sığdırmak için hata fonksiyonunu en aza indirmemiz gerekmektedir. Aşağıda verilmiştir; S(a,b,c) = (4.5.2)
; e.g. F(x,y) = a + bx + cy (4.5.1) Veri noktaları kümesini verilen (4.5.1) formunun en küçük karesine sığdırmak için hata fonksiyonunu en aza indirmemiz gerekmektedir. Aşağıda verilmiştir; S(a,b,c) = (4.5.2)")
37
Devam Aşağıdaki eşitlikleri elde etmek için sıfırı, a, b ve c ile ilgili olarak S nin türevine ayarlayabiliriz: (4.5.3) Yeniden düzenleme ve basitleştirmenin ardından şunu elde ederiz: (4.5.4) Bu işlemler üç bilinmeyenli, a, b ve c denklemlerini belirler
 Yeniden düzenleme ve basitleştirmenin ardından şunu elde ederiz: (4.5.4) Bu işlemler üç bilinmeyenli, a, b ve c denklemlerini belirler.")
38
Devam Çok boyutlu problemlerde güç fonksiyonları doğrusal biçimde indirgenebilir. Şöyle ki; F = axbyc (4.5.5) ln(F) = ln(a) + bln(x) + cln(y) (4.5.6) F* = ln(F); x* = ln(x); y* = ln(y); a* = ln(a); b* = b; and c* = c elde etmek için; F* = a* + b*x* + c*y* (4.5.7) Denklem de verilen doğrusal fonksiyon şöyledir:
 = ln(a) + bln(x) + cln(y) (4.5.6) F* = ln(F); x* = ln(x); y* = ln(y); a* = ln(a); b* = b; and c* = c. elde etmek için; F* = a* + b*x* + c*y* (4.5.7) Denklem de verilen doğrusal fonksiyon şöyledir:")
39
Örnek E4.5.1 Aşağıdaki veriler bilinmeyen bir gazın basınç ölçümlerinden (P),sıcaklığından(T) ve yoğunluğundan () elde edilmiştir.Bu türlerin ideal bir gaz olup olmadığını belirlemek için P = T eşitliğinin çok boyutlu regrasyon analizini kullanarak öğrenin . Çözüm: Yukarıda verilen güç kanunu her iki tarafın logaritmasını vermek üzere doğrusallaştırılabilir. F = ln P, x = ln , y = ln T, a = ln , b = , c = . Dolayısıyla iki bağımsız değişkenli bir lineer denklem elde ederiz. F = a + bx + cy (4.5.1)deki Denklem ile aynıdır. Çözülecek denklem grubu denklem (4.5.4)te verilmiştir. N=20 eklenerek, toplamların değerleri Tablo E4.5.1 denkleminde verilmiştir. 20a b c = a b c = a b c =
,sıcaklığından(T) ve yoğunluğundan () elde edilmiştir.Bu türlerin ideal bir gaz olup olmadığını belirlemek için P = T eşitliğinin çok boyutlu regrasyon analizini kullanarak öğrenin . Çözüm: Yukarıda verilen güç kanunu her iki tarafın logaritmasını vermek üzere doğrusallaştırılabilir. F = ln P, x = ln , y = ln T, a = ln , b = , c = . Dolayısıyla iki bağımsız değişkenli bir lineer denklem elde ederiz. F = a + bx + cy (4.5.1)deki Denklem ile aynıdır. Çözülecek denklem grubu denklem (4.5.4)te verilmiştir. N=20 eklenerek, toplamların değerleri Tablo E4.5.1 denkleminde verilmiştir. 20a b c = a b c = a b c =")
40
Devam Çözüm Gauss eliminasyon metodu kullanılarak elde edilmiştir.Şöyle ki; a = , b = , c = Bundan dolayı = ea = ; = b = ; = c = P T R = = Sabit gaz; R = J/kgK, Ru = 8314 J/kmolK Moleküler ağırlık şöyle verilmiştir M = = = 43.90 Bu gaz büyük ihtimalle ağırlığı 44 oranında bir molekül olan CO2 dir ve ideal bir gazdır çünkü duruma en yakın denklem P = RT, dir.

41
Devam

42
Devam

43
4.6 Spline Eğri Uydurma ve İnterpolasyon
50 nokta içeren bir veri seti verildiğini düşünün, nasıl 49. derece bir polinom gibi görünecektir ve katsayıları belirlemek ne kadar zor olacaktır . Tüm verilerin alt kümesine peace-wise polinomları sığdırmak alternatif bir yöntemdir. (Aynı anda, iki, üç ya da dört noktadan demek istiyoruz), daha sonra, Şekil 'de gösterildiği gibi iki komşu aralık için ortak olan bir noktada buraya yama yapınız. Sınırları birbirine komşu iki aralığı olan noktalar istenildiği gibi seçilebilir fakat bizim amacımız ‘düzgün’ eğriler elde etmektir.
, daha sonra, Şekil de gösterildiği gibi iki komşu aralık için ortak olan bir noktada buraya yama yapınız. Sınırları birbirine komşu iki aralığı olan noktalar istenildiği gibi seçilebilir fakat bizim amacımız ‘düzgün’ eğriler elde etmektir.")
44
Devam Düzgünlük derecesi eşit ortak noktadaki fonksiyonlarının türevlerini yaparak geliştirilebilir. "Spline" adı eğrilerin yumuşaklığını ifade eder ve bu spline olarak anılan mühendisler tarafından uçakta verilen noktaların eğri yumuşaklığını ayarlamak için kullanılan elastik çubuklardan türetilir.

45
İkinci dereceden Spline
Burada, her aralık için belirlenecek polinomlar 2. derecedir ve şöyle ki; Pi (x) = ai + bix + cix2 (4.6.1) i = 1, 2, 3, …, n N aralığının sayısı böyle bulunur. Öncelikle biz her polinom aralığının iki uç noktadan geçmesi gerektiğini öngörmekteyiz .Her i nci aralık için böyledir. yi-1 = ai + bixi-1 + cixi-12 (4.6.2a) yi = ai + bixi + cixi2 (4.6.2b) For i = 1, 2, 3, …, n Şekil 'de görüldüğü gibi i ‘nci aralığın her iki ucu (xi-1, yi-1) ve (xi, yi) dir.
 = ai + bix + cix2 (4.6.1) i = 1, 2, 3, …, n N aralığının sayısı böyle bulunur. Öncelikle biz her polinom aralığının iki uç noktadan geçmesi gerektiğini öngörmekteyiz .Her i nci aralık için böyledir. yi-1 = ai + bixi-1 + cixi-12 (4.6.2a) yi = ai + bixi + cixi2 (4.6.2b) For i = 1, 2, 3, …, n Şekil de görüldüğü gibi i ‘nci aralığın her iki ucu (xi-1, yi-1) ve (xi, yi) dir.")
46
Devam Denklem n denklemlerini teşkil eder ancak derecesi 3 olan n polinomları için bilinmeyen katsayı sayısı 3n'dir. Sonra, eğri yumuşaklıklarını birleştirmede iki komşu polinomun ilk türevlerinin bağlantılı noktalada eşit olması gerekir. bi +2cixi = bi+1+2ci+1xi (4.5.2c) Bu bize ek n-1 denklemlerini verir. Önceki gerekli denklem, genellikle her birinci polinomun veya ilk veya son noktadaki sonraki sıfır polinomunun ikinci türevi gerektiğinden türetilir. Bu, tabi ki ilk ya da son eğrinin düz bir çizgi olduğu anlamına gelir. Dolayısıyla problemimiz için daha uygun olan c1 = 0 ya da cN = 0ı alırız.
 Bu bize ek n-1 denklemlerini verir. Önceki gerekli denklem, genellikle her birinci polinomun veya ilk veya son noktadaki sonraki sıfır polinomunun ikinci türevi gerektiğinden türetilir. Bu, tabi ki ilk ya da son eğrinin düz bir çizgi olduğu anlamına gelir. Dolayısıyla problemimiz için daha uygun olan c1 = 0 ya da cN = 0ı alırız.")
47
Örnek E4.6.1 İkinci dereceden spline eğrisini f(x) = 1/(1+x2) dan türetilen aşağıda verilen veriye 3 aralığında uydurunuz. Çözüm: Denklem a ve 4.6.2b elde edilir(unutmayın ki ilk polinom için, ikinci türev 0 değeri alır =0 ) i = 1 a1 + b1x0 = y0 a1 + b1x1 = y1 i = 2 a2 + b2x1 + c2x12 = y1 a2 + b2x2 + c2x22 = y2 i = 3 a3 + b3x2 + c3x22 = y2 a3 + b3x3 + c3x32 = y3 i 1 2 3 x 0.0 0.5 1.0 1.5 y 0.8 4/13
 i = 1 a1 + b1x0 = y0. a1 + b1x1 = y1. i = 2 a2 + b2x1 + c2x12 = y1. a2 + b2x2 + c2x22 = y2. i = 3 a3 + b3x2 + c3x22 = y2. a3 + b3x3 + c3x32 = y3. i x y /13.")
48
Devam Denklem 4.6.2c i = 1 b1 + 0 = b2 + 2c2x1 i = 2 b2 + 2c2x2 = b3 + 2c3x2 Burada çözülecek 8-denklem 8 - bilinmeyen katsayıları tespit etmek içindir.. Tablodaki x ve y değerlerini yukarıdaki denkleme yerleştiririz ve aşağıdaki matris denklemini elde etmek için yeniden düzenleriz. [A] {C} = {R}

49
Devam Çözüm MATLAB 4.2 kullanılark şu şekilde elde edilir;
Çözüm MATLAB 4.2 kullanılark şu şekilde elde edilir; a1 = 1.0, b1 = -0.4, a2 = 0.9, b2 = 0.0, c2 = -0.4 a3 = , b3 = , c3 = Her aralık için polinomlar şu şekildedir; i = 1 y = 1.0 – 0.4x = p1(x) i = 2 y = x – 0.4x2 = p2(x) i = 3 y = – x x2 = p3(x)
 i = 2 y = x – 0.4x2 = p2(x) i = 3 y = – x x2 = p3(x)")
50
Bölüm 4 Sonu

51
Referanslar Celik, Ismail, B., “Introductory Numerical Methods for Engineering Applications”, Ararat Books & Publishing, LCC., Morgantown, 2001 Fausett, Laurene, V. “Numerical Methods, Algorithms and Applications”, Prentice Hall, 2003 by Pearson Education, Inc., Upper Saddle River, NJ 07458 Rao, Singiresu, S., “Applied Numerical Methods for Engineers and Scientists, 2002 Prentice Hall, Upper Saddle River, NJ 07458 Mathews, John, H.; Fink, Kurtis, D., “Numerical Methods Using MATLAB” Fourth Edition, 2004 Prentice Hall, Upper Saddle River, NJ 07458 Varol, A., “Sayisal Analiz (Numerical Analysis), in Turkish, Course notes, Firat University, 2001
, in Turkish, Course notes, Firat University,")
Benzer bir sunumlar



>")









 Aşağıdaki şekillerden hangisi karedir? AB C D.>")


 DOĞRUSAL DENKLEM SİSTEMLERİNİN SAYISAL ÇÖZÜMLERİ>")


