Sunuyu indir
1
HOŞGELDİNİZ İSTANBUL TEKNİK ÜNİVERSİTESİ GEOMATİK MÜHENDİSLİĞİ
2011 – 2012 DÖNEMİ ARAZİ III ÇALIŞMASI HOŞGELDİNİZ

2
C3 DERECE NOKTALARA DAYALI ALIM İÇİN SIKLAŞTIRMA
EKİP: 27 Atakan AYA Ahmet Turan İŞBECEREN Gözde Nur KURU Fatih IŞIK Nehir SOYKAN Baran YILDIZ

3
1. GİRİŞ 1.1. Çalışmanın Amacı ve Kapsamı 1.2. Seçilen Ölçme Yöntemleri, Alet ve Donanım Alet ve Donanımlar Aletin kontrol ve kalibrasyonu Ölçme Yöntemleri 1.3. Jeodezik Ağın Seçimi, Ağ Tesisi, Röperleme ve Seçim Kanavası 2. AÇI - KENAR ÖLÇMELERİ VE İNDİRGEMELERİ 2.1. Açı Ölçmeleri ve İstasyon Dengelemesi 2.2. Kenar Ölçmeleri 3. YERSEL ÖLÇÜLERLE JEODEZİK ALTYAPININ HAZIRLANMASI ΔH ların bulunması Trigonemetrik Nivelman Dengelemesi ile noktaların yüksekliklerinin hesabı Projeksiyon ve Deniz Yüzeyine Kenar İndirgemeleri Poligon Hesabı ile Yaklaşık Koordinat Değerlerinin Hesaplanması Açı kenar Ağı dengelemesi 4. GPS TEKNİĞİYLE ÖLÇMELER VE DEĞERLENDİRİLMESİ Hızlı Statik Gerçek zamanlı 5. ITRF96 İLE ED-50 ARASINDAKİ DATUM TRANSFORMASYONU 6. MALİYET ANALİZİ 7. SONUÇ VE ÖNERİLER

4
GİRİŞ Yeryüzü üzerinde jeodezik ağların en uygun referans elipsoidine ve seçilen bir datuma göre kurulması ile hazırlanan jeodezik altyapı başta harita üretimi çalışmaları olmak üzere bir çok mühendislik çalışmaları için hayati önem taşır. Kurulan jeodezik ağın, homojen dağılmış bir şekilde, topografyaya hakim ve sağlam zeminlerde bulunması yapılacak olan çalışmanın amacına daha kolay ulaşmasını sağlar.

5
1.1. Çalışmanın Amacı ve Kapsamı
Arazi-III çalışması kapsamında, yersel yöntemlerle halihazır harita üretimine zemin oluşturması amaçlanan, C3 dereceden nokta sıklaştırması projesi yukarıda bahsedilen amaç ve hedeflere göre mesleki sorumluluk bilinciyle hazırlanmıştır. Bu projenin çalışma alanı İTÜ Ayazağa kampüsünün sınırlarıdır ve yaklaşık 2.5 km2 dir. Nokta yoğunluğu en az 3 nokta/ km2 olacaktır. Noktalar, poligon dizilerinin bağlanmasına olanak sağlayacak biçimde ve homojen bir dağılım gösterecektir. Bu amaca yönelik olarak da sırasıyla ; nokta yerlerinin belirlenmesi, tesisi, röper krokilerinin hazırlanması, yatay doğrultu okumaları ve düşey açı ölçmeleri, yatay ve eğik mesafe ölçmeleri ve GPS ölçmeleri yapılmıştır.Sonrasında, kenar indirgemeleri, trigonometrik nivelman hesabı ve dengelemesi, C3 noktalarının yaklaşık koordinat hesabı, yersel ve uzaysal (GPS) yöntemle hesaplanan koordinatların Helmert transformasyonuyla karşılaştırılması yapılmıştır.
 yöntemle hesaplanan koordinatların Helmert transformasyonuyla karşılaştırılması yapılmıştır.")
6
1.2. Seçilen Ölçme Yöntemleri, Alet ve Donanım
Alet ve Donanımlar 2 x Gözleme Plakası 2 x Düzeçler 1 x Alet Sehpası 1 x Çekiç 1 x Çelik Şerit Metre 1 x Saniye Teodoliti (Kern DKM2) 1 x Elektronik Uzaklık Ölçer (Wild TC2000 EDM) 2 x Yansıtıcı 1 x GPS (Leica Viva) Saniye teodolitin kontrolü yapılmıştır.
 1 x Elektronik Uzaklık Ölçer (Wild TC2000 EDM) 2 x Yansıtıcı. 1 x GPS (Leica Viva) Saniye teodolitin kontrolü yapılmıştır.")
7
1.3. Jeodezik Ağın Seçimi, Ağ Tesisi, Röperler ve Seçim Kanavası
Ölçme Yöntemleri Yersel Yöntemler GPS Yöntemleri 1.3. Jeodezik Ağın Seçimi, Ağ Tesisi, Röperler ve Seçim Kanavası Yerleşke alanının ağaçlık ve engebeli olmasından dolayı Jeodezik ağ olarak Presizyonlu Poligon dizisi seçilmiştir. Jeodezik ağ oluşturulurken BÖHHBÜY ‘ nin ilgili maddeleri çerçevesinde çalışmalar yürütülmüştür.

8
Jeodezik noktalar seçilirken dikkat edilen hususlar:
4 tanesi bağlantı noktası olmak üzere 7 adet nokta tesisi gerçekleştirildi Noktalar arası uzaklık: En az 150 m En fazla 650 m seçildi. Jeodezik noktalar seçilirken dikkat edilen hususlar: Noktaların birbirlerini net görmelerine Sağlam zeminde olmalarına GPS alımına uygun olması için anten yüksekliğinden geçen ufkun 15 derece üzerinden ağaç, bina vb engeller bulunmamasına dikkat edilmesi.(BÖHHBÜY madde 12.d)
")
9
Noktaların numaralandırılması
3 adet C3 derece Nirengi Noktası tesis edilmiştir. Noktaların numaralandırılması işlemi Büyük Ölçekli Harita ve Harita Bilgileri Üretim Yönetmeliği Madde 9’ C bendinde belirtilen esaslara uygun olarak yapılmıştır. Madde 9 bend C: (Alım için sıklaştırma noktaları :Bu noktalar, dördüncü basamak “3” olmak üzere beşinci basamaktan itibaren 0001’den başlayarak numaralanır (Örnek: G )). Nokta numaraları; F , F , F olarak belirlenmiştir.
). Nokta numaraları; F , F , F olarak belirlenmiştir.")
11
2. AÇI - KENAR ÖLÇMELERİ VE İNDİRGEMELERİ
2.1. Yatay Doğrultu ve Düşey Açı Gözlemleri Yatay doğrultu ölçmelerinde 4 tam seri, Düşey açılar en az 2 tam seri ölçülmüştür. Ayrıca alet ve reflektör yükseklikleri ölçülerek kaydedilmiştir.

12
2.2. Kenar Ölçmeleri Doğrultu ölçmeleri tamamlandıktan sonra, noktalar arası mesafelerin belirlenebilmesi amacıyla elektronik uzaklık ölçer kullanılarak noktalar arası mesafeler bulunmuştur. Kenar ölçmelerinden sonra elektronik uzaklık ölçerin “sıfır noktası eki” hesabı için İTÜ Ayazağa Yerleşkesi’ndeki nolu pilyeler kullanılarak kalibrasyon ölçmeleri yapılmıştır. Kalibrasyonda kullanılan kenarların düzeltmeleri ve deniz yüzeyine indirgemeleri sıcaklık ve basınç değerleriyle elde edilmiştir.

13
Kalibrasyon Kontrol Ölçmeleri
1 2 3 4 5
14
Nokta yüksekliklerinin hesabı
3. YERSEL ÖLÇÜLERLE JEODEZİK AĞIN DENGELENMESİ Nokta yüksekliklerinin hesabı Elde edilen tüm ölçüler kullanılarak, noktalar arası yükseklik farklarının, trigonometrik nivelman hesabı yöntemiyle hesaplanmıştır. Nokta yüksekliklerinin belirlenmesinde eğik kenarlar ve düşey açılarla bulunan yükseklik farkları kullanılmıştır. Bulunan yükseklik farkları, BÖHHBÜY Madde 27/g’ ye göre irdelenmiştir.

15
Kenarların İndirgenmesi ve Trigonometrik Nivelman Dengelemesi
Elektronik uzaklık ölçerle bulunan kenarlara atmosferik düzeltmeler getirilerek geometrik uzunluklar ( Düzeltilmiş eğik uzunluklar) bulunmuştur. Yükseklileri kesin olan noktalar ile noktalar arası ortalama yükseklik farkları ölçü alınarak dengelemeye işlemine geçilmiştir. Trigonometrik nivelman dengelemesi işlemlerinde, öncelikle noktaların yaklaşık yükseklikleri belirlenmiştir. Düzeltme denklemleri yazılmıştır. Yaklaşık yükseklikler ve ortalama yükseklik farkları yardımı ile dengeleme işlemi gerçekleştirilmiştir. Her noktanın dengelenmiş yükseklikleri (ortometrik yükseklikleri) hesaplanmıştır.
 bulunmuştur. Yükseklileri kesin olan noktalar ile noktalar arası ortalama yükseklik farkları ölçü alınarak dengelemeye işlemine geçilmiştir. Trigonometrik nivelman dengelemesi işlemlerinde, öncelikle noktaların yaklaşık yükseklikleri belirlenmiştir. Düzeltme denklemleri yazılmıştır. Yaklaşık yükseklikler ve ortalama yükseklik farkları yardımı ile dengeleme işlemi gerçekleştirilmiştir. Her noktanın dengelenmiş yükseklikleri (ortometrik yükseklikleri) hesaplanmıştır.")
16
Yukarıda elde edilen ΔH ile trigonometrik nivelman dengelemesi hesabı yapıldı. Dengeleme sonucunda ortaya çıkan ek değerleri, ΔH hesabından elde ettiğimiz yükseklik değerlerine katılarak kesin kotlar elde edildi.

17
H D=Optik yol Ss=Düzeltilmiş Eğik Uzunluk SH= Yatay Uzunluk
Sp=Projeksiyon düzlemindeki uzunluk SG= Deniz Seviyesindeki Uzunluk~Elipsoit Yüzündeki Uzunluk H Ortometrik Yükseklik h Elipsoidal Yükseklik N Geoid ondülasyonu

18
Kenar indirgemeleri yapıldıktan sonra poligon hesabı ile yaklaşık koordinatların bulunmasına geçildi. İlk olarak açıklık açıları hesap edildi ve projeksiyon yüzeyine indirgediğimiz kenar değerleri girilerek hesap tamamlandı, kontroller gerçekleştirildi.

19
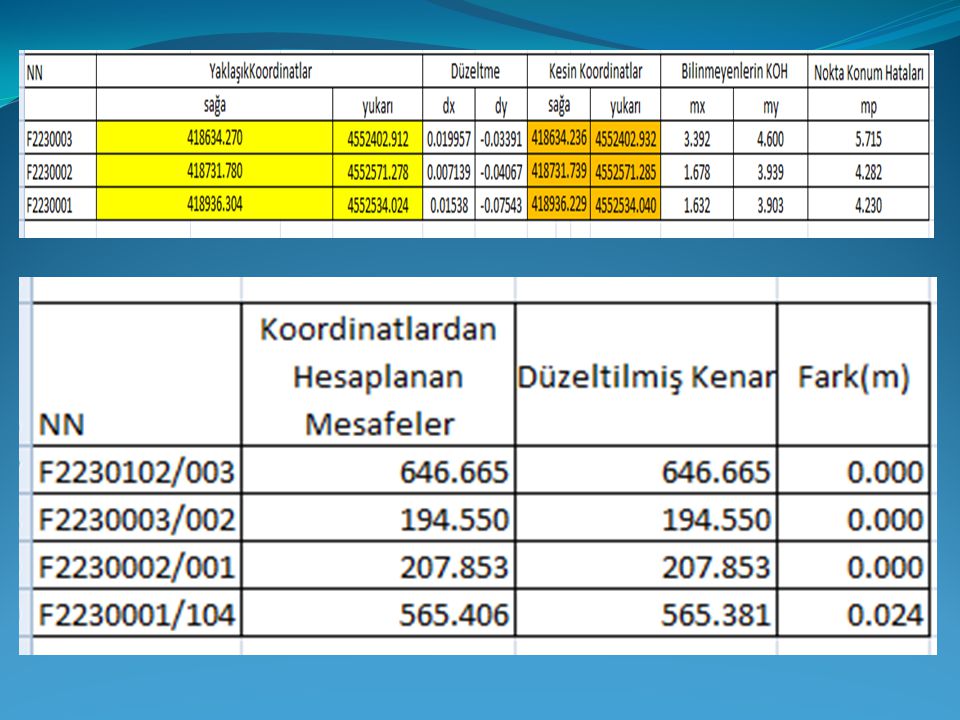
Yersel ölçmelerle jeodezik ağın dengelenmesi
Deniz yüzeyindeki kenarlara eğim düzeltmesi getirerek elipsoidal düzleme indirgendi, elipsoidal düzlemden projeksiyon indirgemesi yapılarak kenarlar projeksiyon düzlemine indirgenmiş oldu. Deniz yüzeyine indirgenmiş kenarlar ile yatay doğrultular kullanılarak bağlı poligon hesabı ile açı kenar dengelemesine girecek olan yaklaşık koordinatlar hesaplanmıştır. Kenar ölçüleri için düzeltme denklemi katsayıları hesaplandı Kenarlar için Düzeltme Denklemi: vSij=Cost0ijxi - Sint0ijyi + Cost0ijxi + Sint0ijyi – lSij - lSij =S0 – Sind Doğrultular için Düzeltme Denklemi: vrij = - z1 + arijxi + brijyi – arijxj – brijyj – lrij Yöneltme bilinmeyeni= Bir nokta üzerinde çeşitli noktalardan yapılan doğrultu ölçmelerinde, teodolitin ölçme anındaki yatay açı tablosunun 0 doğrultusunun X ekseni ile yaptığı açıdır.

20
Dengeleme Hesabı A katsayılar matrisi P ağırlık matrisi
l mutlak terim matrisi elde edildi. Normal denklemler kuruldu. N=AT*P*A normal denklem katsayıları matrisi n=AT*P*l yalın terimler vektörü Nx-n=0 normal denklemleri elde edilir. V= A*x – l düzeltme değerleri hesaplanır. N-1=Qxx varyans kovaryans matrisi hesaplanmıştır. Dengeleme işlemi BÖHYY Madde 35 ’ deki esaslara uygun olarak yapılmıştır. Nokta koordinatları en küçük kareler yönteminde, dolaylı ölçüler dengelemesine göre, yatay doğrultular ve projeksiyon yüzeyindeki uzunluklar ölçü alınarak hesaplanmıştır. Madde 35 − Proje alanındaki yatay koordinatları hassas olarak belirlenmemiş nivelman noktalarının koordinatları ± 15 cm doğrulukta belirlenir.

22
4. GPS TEKNİĞİYLE ÖLÇMELER VE DEĞERLENDİRİLMESİ
Sabit GPS alıcısı olarak da İSTA kullanılmıştır. Ölçümler 2 farklı yöntem ile yapılmıştır: Statik Yöntem Gerçek Zamanlı Yöntem 5. ITRF96 İLE ED-50 ARASINDAKİ DATUM TRANSFORMASYONU İki farklı sistemin birbirine göre karşılaştırılması ve yorumlanabilmesi için; sistemlerin birbirleri cinsinden ifade edilebilir hale getirilmeleri amacı ile Helmert benzerlik dönüşümü kullanılmıştır.

23
ONDÜLASYON HESABI GPS gözlemlerinde elde edilen cografi koordinatlar ve elipsoidal yükseklikler, çalışma bölgesi için verilen geoid ondülasyonu polinomu kullanılarak ortometrik yüksekliklere dönüştürüldü. Ayrıca yersel tekniklerle belirlenen ortometrik yükseklikler ile GPS sonucu İstanbul Geodi kullanılarak üretilen ortometrik yükseklikler arasındaki fark karşılaştırıldı.

24
6. MALİYET ANALİZİ

25
7. SONUÇ VE ÖNERİLER Arazi-III çalışması kapsamında, BÖHHBÜY’ ne göre yapılan bu çalışmada C3 dereceden nokta sıklaştırması ile kapsamlı deneyim kazanıldı. Ekip çalışması, grup içi iş paylaşımı, hiyerarşik çalışmanın ve organizasyonel disiplinin önemi kavrandı Teorik bilgilerin pratikte uygulanması ile geniş deneyim elde edildi Arazi çalışmasının haftanın altı günü sürmesi, biriken yorgunluk ve iş yükünün yoğunluğu nedeniyle hata yapma olasılığını arttırmakta ve verimi düşürmektedir Ayrıca arazi çalışmasının daha verimli geçmesi ve hataları azaltmak gayesiyle, projede istenenlerin daha net belirtilmesinin bizler açısından derin önem taşıdığının altını çizmek isteriz.

26
İlginiz İçin Teşekkürler














 Bakanlıklararası Harita İşlerini Koordinasyon.>")






 ÖLÇÜLMESİ>")