Sunuyu indir
1
ÜNİVERSAL MOTORLAR GİRİŞ
Yukarıdaki şekilde üniversal motorun kutup ve endüvi sargılarının seri bağlanışı ve endüktörünün çıkıntılı olduğu gösteriliyor. Farklı kutupları bir birine yaklaştırılan mıknatıslar, bir birlerini çeker. ÜNİVERSAL MOTOR; ANİMASYON1 ANİMASYON2 DEĞİŞİK ANİMASYONLAR; ANİMASYON 3 ANİMASYON 4 ANİMASYON 5 ANİMASYON 6 ANİMASYON 7 Mıknatıslar bir birlerine değince hareket duracaktır. Günümüzde kullanılan standart elektrik motorları, iki sabit, 3 elektromıknatıs tan oluşur. Elektrik fırçalar ve komütatör yardımıyla bobinlere verilir. Fırça ve komütatörün bir birlerine yaptığı açı, elektromıknatısların çalışma yeri ve anını belirler. Dönen sabit mıknatıslar, elektromıknatıs ile değiştirildiğinde, çekme kuvveti istenildiği gibi durdurulup başlatılabilir ve hareketin devamlılığı sağlanır. Mıknatıslar dan biri, bir mile bağlanır ve düzlemsel hareket dönme hareketine çevrilerek mıknatısların bir birine değmemesi, dolayısıyla hareketin sürekli olması sağlanır.

2
ÜNİVERSAL MOTOR (SERİ MOTOR)
a) Yapısı: Üniversal motor doğru akım seri motoruna benzer.Statoru saç paketlerinden çıkıntılı kutuplu olarak yapılmış kutuplara kutup bobinleri yerleştirilmiştir.Rotor doğru akım makinası endüvisi gibidir,saç parçalarından yapılmıştır.Rotor oluklarına yerleştirilen sargılar D.A endüvi sargılarının aynıdır.Yapısı nedeniyle hem D.A hem de A.A.da kullanılır.Her iki akımda da kullanıldığı için bu motorlara üniversal motor denilmektedir.
 Yapısı: Üniversal motor doğru akım seri motoruna benzer.Statoru saç paketlerinden çıkıntılı kutuplu olarak yapılmış kutuplara kutup bobinleri yerleştirilmiştir.Rotor doğru akım makinası endüvisi gibidir,saç parçalarından yapılmıştır.Rotor oluklarına yerleştirilen sargılar D.A endüvi sargılarının aynıdır.Yapısı nedeniyle hem D.A hem de A.A.da kullanılır.Her iki akımda da kullanıldığı için bu motorlara üniversal motor denilmektedir.")
3
b) Çalışma prensibi: Üniversal motora bir fazlı alternatif gerilim uyguladığımızda statordaki kutup bobinlerinden ve endüvi sargılarından alternatif akım geçer.Kutup bobinlerinden geçen akım manyetik alan meydana getirir.Endüvi sargılarından akım geçirilince bir MMK oluşur ve iletken manyetik alanın dışına doğru itilir.Oluşan bu kuvvet endüvinin dönmesini sağlar. Alternatif akımın pozitif peryodunda kutup bobinlerinden ve endüviden bir yönde akım geçer,negatif peryodda ise her ikisinden de tersi yönde bir akım geçer.Endüvide N kutbunun altındaki iletkenler bir yönde itilirken,S kutbunun altındaki iletkenlerde ters yönde itilirler.Endüvinin iki tarafındaki bu kuvvet çiftinin meydana getirdiği döndürme momenti endüviyi döndürür.Alternatif akımın negatif yarım periyodunda ise kutuplardan geçen akımın yönü değiştiği için kutuplar değişir.Aynı anda endüviden geçen akımın da yönü değiştiği için kutupların altındaki akım yönleri aynıdır.Manyetik alan tarafından endüvi iletkenlerinin itilme yönleri değişmediği için endüvi aynı yönde dönmeye devam eder. Endüvide meydana gelen döndürme momenti,endüviden geçen akıma ve kutupların manyetik akısına bağlıdır.Endüvi ve kutup sargıları seri bağlı olduğu için manyetik akının ve endüvi akımının artışı aynı anda olur.Bu yüzden üniversal motorların kalkınma ve döndürme momentleri yüksektir.

4
(hızı yüzde olarak değerlendirilmiştir.)
Yan tarafta görülen resimde bir üniversal motorun HIZ-MOMENT karakteristiği görülmektedir. Üniversal motorlarda stator (kutup) sargıları ile endüvi sargıları birbirine seri bağlı oldukları için oluşan manyetik akı ve endüviden geçen akımın aynı olması sebebiyle bu motorların kalkınma ve döndürme momentleri çok yüksektir. Yandaki şekilde görüldüğü gibi motorun ilk andaki kalkınma hızı, dönme momentinin yüzdelik oranına bakıldığında çok yüksek seviyelerde. Motor kalkındıktan sonra 60 hertz’lik frekansta döndürme momenti artar fakat dönme hızı düşer, Doğru akımda ise frekansı sabit olmasına rağmen moment artar, hız 60 hertz’lik şebekeye göre daha az düşüş gösterir. Görüldüğü gibi frekans 25 hertz’e düşürülürse moment ile dönme hızı fark daha yavaş azalır. Şekilde kalkınma anında 25, 60 hertz ve dc şebekelerinde kalkınma ve dönme momenti aynı; kalkındıktan sonra yüzdelik değişim oranına göre arada farklılıklar oluşuyor. Bu da üniversal motorların kalkınma ve dönme momentlerinin ne kadar yüksek olduğunu gösteriyor (hızı yüzde olarak değerlendirilmiştir.) (Dönme hızı ) (Dönme Momenti (yüzde olarak değerlendirilmiştir.))
 sargıları ile endüvi sargıları birbirine seri bağlı oldukları için oluşan manyetik akı ve endüviden geçen akımın aynı olması sebebiyle bu motorların kalkınma ve döndürme momentleri çok yüksektir. Yandaki şekilde görüldüğü gibi motorun ilk andaki kalkınma hızı, dönme momentinin yüzdelik oranına bakıldığında çok yüksek seviyelerde. Motor kalkındıktan sonra 60 hertz’lik frekansta döndürme momenti artar fakat dönme hızı düşer, Doğru akımda ise frekansı sabit olmasına rağmen moment artar, hız 60 hertz’lik şebekeye göre daha az düşüş gösterir. Görüldüğü gibi frekans 25 hertz’e düşürülürse moment ile dönme hızı fark daha yavaş azalır. Şekilde kalkınma anında 25, 60 hertz ve dc şebekelerinde kalkınma ve dönme momenti aynı; kalkındıktan sonra yüzdelik değişim oranına göre arada farklılıklar oluşuyor. Bu da üniversal motorların kalkınma ve dönme momentlerinin ne kadar yüksek olduğunu gösteriyor. (hızı yüzde olarak değerlendirilmiştir.) (Dönme hızı ) (Dönme Momenti (yüzde olarak değerlendirilmiştir.))")
5
n= [U-I(RA+RS)] /(K*Ø) n= devir sayısı RA=endüvi direnci
c) Özellikleri: Üniversal motorların devirleri D.A seri motorlarında olduğu gibi yükle değişir.Boştaki devir sayıları çok yüksektir.devirleri d/d ’ya kadar çıkar.Boşta devir devir sayısını sınırlayan sürtünme ve vantilasyon kayıplarıdır. Üniversal motor D.A la çalıştığında “devir sayısı – yük” karekteristik eğrisi ,A.A da çalıştığındaki karekteristik eğrisinden biraz düşük olur.Bazı motorlarda A.A ve D.A “devir yük” ergileri birbirini keser. seri motorlarda devir sayısını veren formülü D.A makinalarından hatırlayarak yazarsak: n= [U-I(RA+RS)] /(K*Ø) n= devir sayısı RA=endüvi direnci RS=seri kutup direnci U=motora uygulanan gerilim I=motordan geçen akım K=katsayı Ø=manyetik akı Üniversal motor A.A ile çalışırken motor yüklendikçe devir sayısını etkileyen bir başka etken de : Endüvi ve kutup sargılarının reaktif dirençleridir.Endüvinin ve kutup sargılarının reaktif dirençlerinin sebep olduğu reaktif gerilim düşümleri endüvi ye uygulanan gerilimi düşürür.Böylece A.A da çalışan motorun devir sayısı D.A da çalışırken oluşan devir sayısından düşük olur. Yük altında çalışan bir seri motorun devir sayısı motora uygulanan gerilimi değiştirerek ayarlanır. (motor şaftı) (sincap kafes halkaları) (paketlenmiş sac gövde) (Bir AC İndiksiyon Motorun Rotoru- üst üste paketlenmiş sac gövdeden oluşan sincap kafesli (rotor))
![n= [U-I(RA+RS)] /(K*Ø) n= devir sayısı RA=endüvi direnci](http://slideplayer.biz.tr/slide/10285256/33/images/5/n%3D+%5BU-I%28RA%2BRS%29%5D+%2F%28K%2A%C3%98%29+n%3D+devir+say%C4%B1s%C4%B1+RA%3Dend%C3%BCvi+direnci.jpg "c) Özellikleri: Üniversal motorların devirleri D.A seri motorlarında olduğu gibi yükle değişir.Boştaki devir sayıları çok yüksektir.devirleri d/d ’ya kadar çıkar.Boşta devir devir sayısını sınırlayan sürtünme ve vantilasyon kayıplarıdır. Üniversal motor D.A la çalıştığında devir sayısı – yük karekteristik eğrisi ,A.A da çalıştığındaki karekteristik eğrisinden biraz düşük olur.Bazı motorlarda A.A ve D.A devir yük ergileri birbirini keser. seri motorlarda devir sayısını veren formülü D.A makinalarından hatırlayarak yazarsak: n= [U-I(RA+RS)] /(K*Ø) n= devir sayısı. RA=endüvi direnci. RS=seri kutup direnci. U=motora uygulanan gerilim. I=motordan geçen akım. K=katsayı. Ø=manyetik akı. Üniversal motor A.A ile çalışırken motor yüklendikçe devir sayısını etkileyen bir başka etken de : Endüvi ve kutup sargılarının reaktif dirençleridir.Endüvinin ve kutup sargılarının reaktif dirençlerinin sebep olduğu reaktif gerilim düşümleri endüvi ye uygulanan gerilimi düşürür.Böylece A.A da çalışan motorun devir sayısı D.A da çalışırken oluşan devir sayısından düşük olur. Yük altında çalışan bir seri motorun devir sayısı motora uygulanan gerilimi değiştirerek ayarlanır. (motor şaftı) (sincap kafes halkaları) (paketlenmiş sac gövde) (Bir AC İndiksiyon Motorun Rotoru- üst üste paketlenmiş. sac gövdeden oluşan sincap kafesli (rotor))")
6
Motor yüklendiğinde endüviden geçen yük akımının sebep oldugu endüvi reaksiyonu hava aralıgındaki manyetik akıyı azaltır. Buda devir sayısının yükselmesine neden olur. (Stator Kutbu) (Stator Boyunduruğu) (Hava Aralığı) (Rotor dişi) (Rotor Boyunduruğu)
 (Stator Boyunduruğu) (Hava Aralığı) (Rotor dişi) (Rotor Boyunduruğu)")
7
D) Devir Yününün Değiştirilmesi:
Bir üniversal motorun endüvi uçlarını veya kutup sargısı uçlarını değiştirerek devir yönü değiştirilebilir. Fakat devir yönünü değiştirmek için endüvi ve kutup sargılarının uçları aynı anda değiştirilmez. Çünkü her iki sargının yönü değişirse; endüvi sargısı ve kutup sargısından geçen akımın yönü aynı kalır. Böyle olunca da motor aynı yönde döner.

8
E) Üniversal Motorun Hız Kontrolü:
Aşağıdaki şekilde yarım dalga sadece pozitif alternaslarda çalışan hız kontrol devresi görülmektedir. Thyristörün iletim gerilimi P1 potansiyometresi ve D1 diyodu üzerinden sağlanmaktadır. P1 direnci artırıldığında gecikme açısı büyür ve hız azalır. P1 direnci azaltıldığında ise gecikme açısı büyür ve hız artar. Böylece pozitif alternanslarda gerilimin azalıp çoğaltılmasıyla hız kontrolü yapılmış olur. Yukarıda şekildeki röle üniversal motorları kontrol etmek için kullanılır. Üniversal motorların hızını potansiyometre aracılığı ile ayarlamamızı sağlar. Motor üzerindeki AC tako işaretini kullanarak hız Geri beslemeli olarak çalışmaktadır. Üniversal motorlara örnek olarak çamaşır makinası motorlarını gösterebiliriz. Raya veya pano taban sacına monte edilebilir. Potansiyometresi üzerinde ve harici olan modelleri vardır. En fazla 2,2kW motor bağlanabilir. Thyristörlü Üniversal Motor Hız Kontrol Devresi

9
Ana Uygulamalar ■ Güç aletleri ■ Mutfak robotu
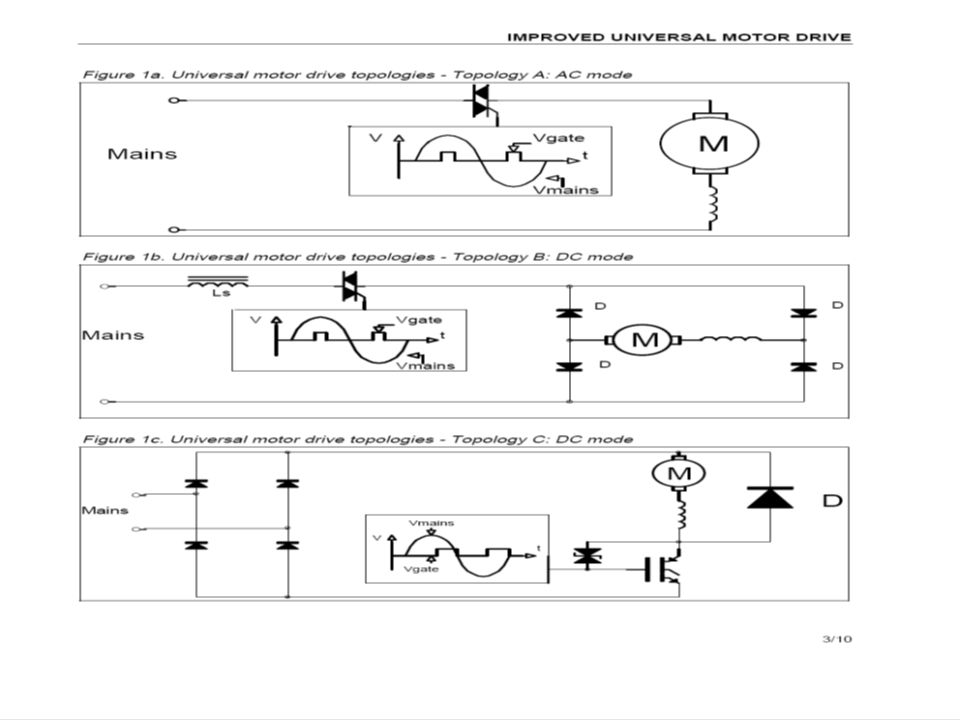
Aşağıda Üniversal Motor İçin Çeşitli Hız Kontrol Uygulamaları Yer Almaktadır. AC universal motor Motor şebeke gerilimine bir AC anahtar ile bağlıdır. Motor üstüne düşen gerilim mikroişlemci tarafından triyağın uygun fazlarda tetiklenmesiyle değiştirilir. Ana Uygulamalar ■ Elektrikli Süpürge ■ Bulaşık makinesi ■ Güç aletleri ■ Mutfak robotu DC üniversal motor Tristör pozitif alternasta motora gerilimi iletmektedir. Motor EMF si yükü dengeleyerek hız kontrolü sağlanır. Ana Uygulamalar ■ Güç aletleri ■ Mutfak robotu PWM üniversal motor Motor üstüne düşen doğrultulmuş gerilim PWM modunda duyulamayan bir frekansta değiştirilir. Bir DC kaynak motor gürültüsünü azaltıp motor verimliliğini arttırarak düzgün bir çalışma rejimi sağlar. Ana Uygulamalar ■ Bulaşık makinesi ■ Mutfak robotu ■ Endüstriyel hareket kontrolü

10
Üniversal Motorların Kullanıldıkları Yerler
Motor Tipi Stator Uzunluğu Güç (w) Kullanım Sahası UN 52 20/50 40/80 Taşınabilir veya sabit büyük fanlı saç kurutucular, kahve değirmenleri, vakumlu küçük süpürgeler, el blenderleri, aspiratörler, el matkapları, cila makineleri, küçük çim biçme makineleri. UN 70 20/55 70/400 Orta gerilim kesicilerinde yay kurma motoru olarak, elektrikli ev aletleri, süt krema makineleri, santrifüjlü laboratuar cihazları, küçük el matkapları, elektrikli süpürgeler. UN 80 20/60 130/550 Elektrikli ev aletleri, pompalar, fanlar, çim biçme makineleri, marangoz makineleri. UN 84 30/70 Orta gerilim kesicilerinde yay kurma motoru, toz altı ve gaz altı kaynak makinelerinde, çim biçme makinelerinde, pompalarda, sanayide hız kontrolü gereken yerlerde.
 Kullanım Sahası. UN /50. 40/80. Taşınabilir veya sabit büyük fanlı saç kurutucular, kahve değirmenleri, vakumlu küçük süpürgeler, el blenderleri, aspiratörler, el matkapları, cila makineleri, küçük çim biçme makineleri. UN /55. 70/400. Orta gerilim kesicilerinde yay kurma motoru olarak, elektrikli ev aletleri, süt krema makineleri, santrifüjlü laboratuar cihazları, küçük el matkapları, elektrikli süpürgeler. UN / /550. Elektrikli ev aletleri, pompalar, fanlar, çim biçme makineleri, marangoz makineleri. UN /70. Orta gerilim kesicilerinde yay kurma motoru, toz altı ve gaz altı kaynak makinelerinde, çim biçme makinelerinde, pompalarda, sanayide hız kontrolü gereken yerlerde.")
11
ÇAMAŞIR MAKİNESİNDE KULLANILAN BİR ÜNİVERSAL MOTOR UYGULAMASI
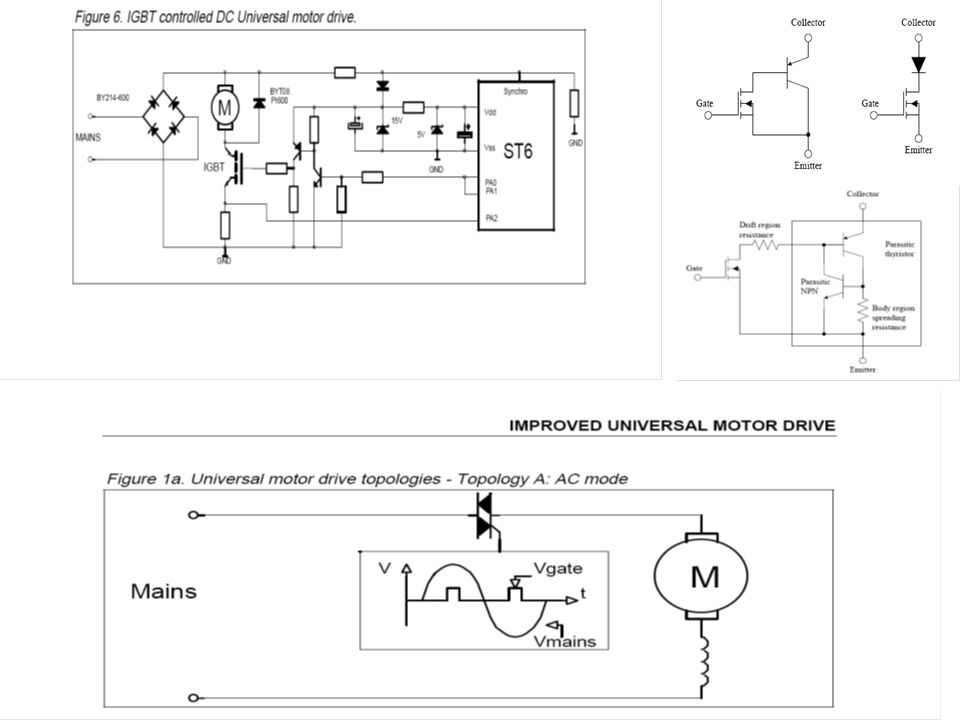
Tipik bir tam otomatik çamaşır makinesi, blok diyagramı. Çamaşır makinesi uygulaması, ağırlıklı olarak motor hız kontrolü ve ac anahtarlama üzerine dayanmaktadır. Bu uygulamada gösterilen elektronik devreler ST MİKRO ELEKTRONİK tarafından yapılmıştır.

12
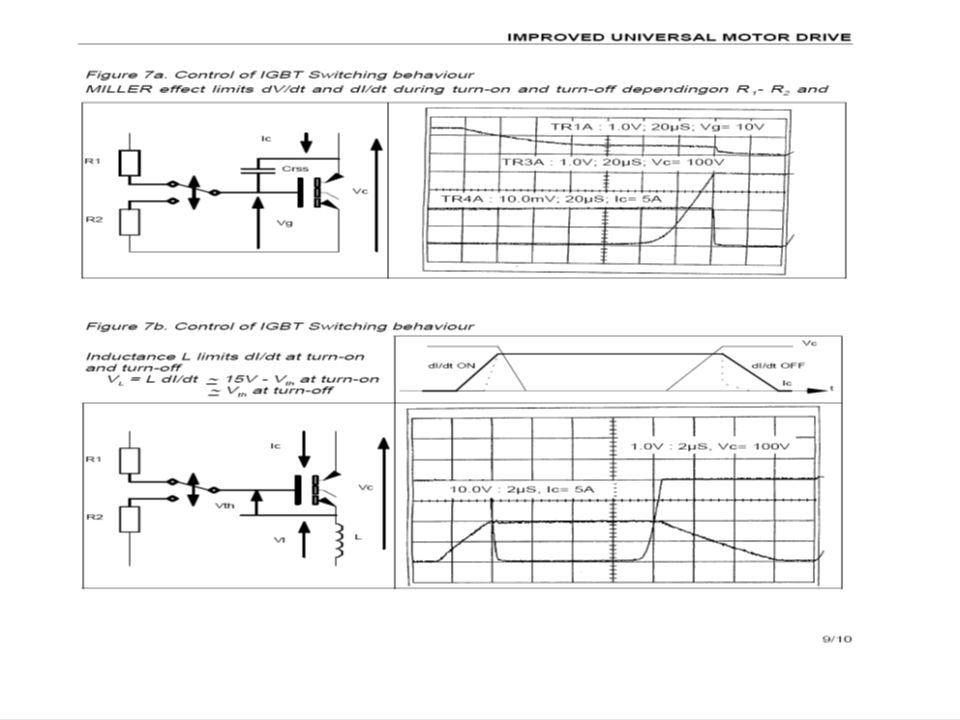
Aşağıdaki Şekillerde Üniversal Motorların Çeşitli Elektronik Devre Elemanlarıyla Yapılmış Driverler Bulunmaktadır.

16
Deney: 1 Deneyin Adı: Üniversal motorun devir sayısının yük ve gerilimle değiştirilmesi olayını kavramak ve hız akım ilişkisini öğrenmek. Deneyin Yapılışı: Motor ilk önce AC şebekeye bağlanır. Devreye bir voltmetre ve ampermetre bağlanır. Gerilim ayarlanabilecek şekilde motor devresi kurulur. Gerilim yavaşça arttırılarak motora yol verilir. Motor boşta çalıştığı için değerler hızlı bir şekilde kayıt edilir. Daha sonra motorun miline bir DC jeneratör bağlanır ve jeneratörü yüklemek için lambalar kullanılır. Üniversal motorun gerilimi yavaşça arttırılarak istenilen bir değerde sabitlenir ve jeneratöre bağlı lambalar devreye alınarak DC jeneratör yüklenir, daha fazla güce ihtiyaç duyması sağlanır; bu da üniversal motorun daha fazla yüklenmesini sağlayarak milindeki momentin düşmesine sebep olur. Böylece üniversal motorun hızı yükle değiştirilmiş olur. Bu deneyde üniversal motorun hızı arttıkça çektiği akım azalır, hızı yavaşladıkça çekilen akım artar. Çünkü motor yüklendikçe zorlanır ve motor sargıları ısınıp sargı direncinin artmasına sebep olur böylece motor şebekeden daha fazla akım çeker.

17
Deneyden Alınan Değerler ve Hesaplamalar:
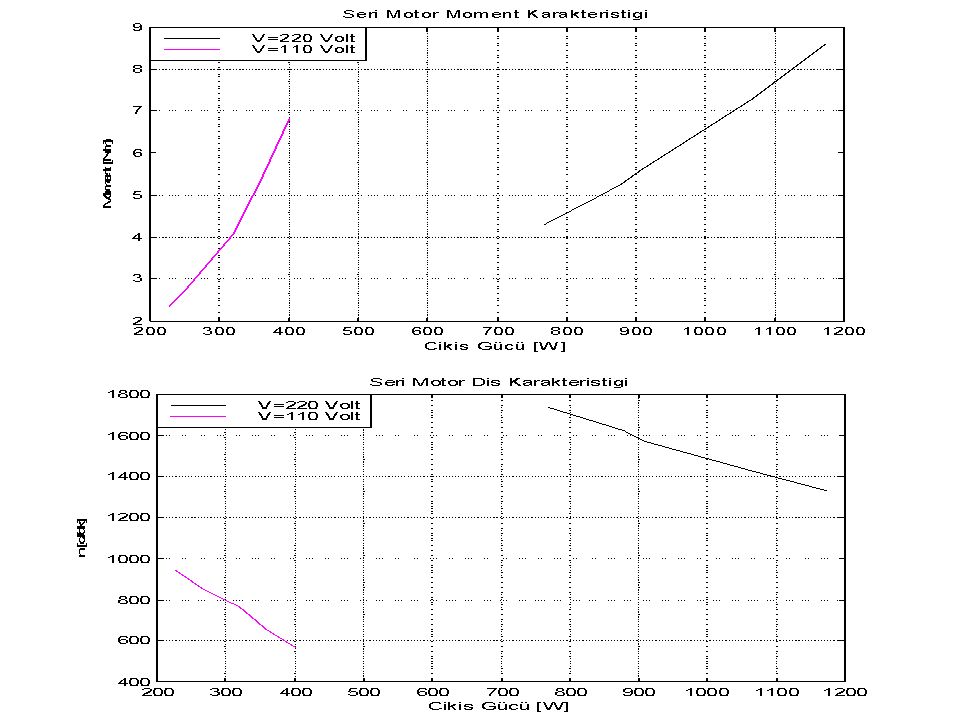
Deneyin Amacı: D.A. motorlarının işletme karakteristiğinin incelenmesi DENEYİN BAĞLANTI ŞEMASI: Deneyden Alınan Değerler ve Hesaplamalar: Moment Verim Akım(A) N(d/d) Power(w) V V/2 410 206 0,49 0,34 6,4 4,9 1665 945 530 180 635 402 0,58 7,4 5,6 1450 805 700 225 787 464 0,61 0,47 8 6,1 1335 725 800 260 875 561 0,6 8,5 6,5 1260 670 840 290 946 649 0,588 9 7,1 1200 600 310
 N(d/d) Power(w) V. V/ ,49. 0,34. 6,4. 4, ,58. 7,4. 5, ,61. 0, , ,6. 8,5. 6, , ,")
18
η=P0/Pi V için V/2 için 0,75=525/P ise P= ,75=150/P ise P=200 0,75=710/P ise P=946, ,75=250/P ise P=333,3 0,75=810/P ise P= ,75=260/P ise P=346,6 0,75=850/P ise P=1133, ,75=290/P ise P=386,6 0,75=875P ise P=1166, ,75=300/P ise P=400 Motorun verimi; V için verim; V/2 için verim; η=700/1408=0, η=200/588=0,34 η=946,6/1628=0, η=333,3/672=0,49 η=1080/1760=0, η=346,6/732=0,47 η=1133,3/1870=0, η=386,6/780=0,49 η=1166,6/1980=0, η=400/852=0,47 V için V/2 için Moment : V için; Md=974x0,7/1665= 0,41kgm= 410 Nm Md=974x0,946/1450= 0,635kgm= 635 Nm Md=974x1,08/1335=0,787 kgm= 787 Nm Md=974x1,133/1260=0,875 kgm= 875 Nm Md=974x1,166/1200=0,946 kgm= 946 Nm V/2 için; Md=974x0,2/945=0,206 kgm= Nm Md=974x0,333/805=0,402 kgm= 402 Nm Md=974x0,346/725=0,464 kgm= 464Nm Md=974x0,386/670=0,561 kgm= 561 Nm Md=974x0,4/600=0,649 kgm= Nm Motorun giriş gücü; P=VxI ise V için (V=220 sbt) V/2 için (V=120 sbt) P=220x6,4= P=120x4,9=588 P=220x7,4= P=120x5,6=672 P=220x8= P=120x6,1=732 P=220x8,5= P=120x6,5=780 P=220x9= P=120x7,1=852
 V/2 için (V=120 sbt) P=220x6,4=1408 P=120x4,9=588. P=220x7,4=1628 P=120x5,6=672. P=220x8=1760 P=120x6,1=732. P=220x8,5=1870 P=120x6,5=780. P=220x9=1980 P=120x7,1=852.")
19
Deneyden Alınan Değerler Doğrultusundaki Seri Motor Karakteristikleri

21
Üniversal Motor Deneyleri
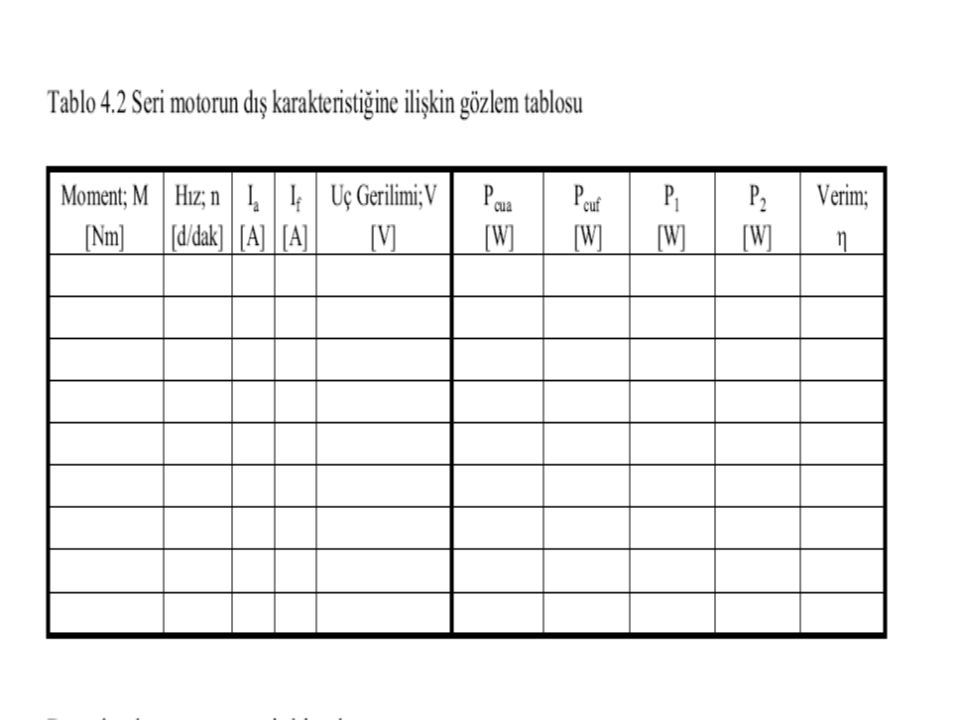
Deneyin Amacı: D.A.’ da seri motor tarafından üretilen moment, verim çıkış gücü ve hız arasındaki ilişkiyi ortaya koymaktır. Deneyin Yapılışı: Deney başlangıç ayarları; Ortalama hız: 1800 d/dk Besleme gerilimi: DC 110V Çalıştırma modu: Start/Stop/Run Endüvi reostası ∞’ da Moment anahtarı INT konumunda Fren Moment Kontrolü minimumda olacak Devre yandaki şekle göre bağlanacaktır. Üniversal Motor Deneyleri Ryv’ en büyük değerine getirilmelidir. Motor besleme gerilimi 110V’ a ayarlanır ve deney süresince sabit tutulur. Dinamo freninin moment kontrolü bir miktar arttırıldıktan sonra, Ryv’ nin değeri yavaşça azaltılarak motora yol verilir. Seri motorun yüksüz çalıştırılması durumunda devir sayısının sonsuza gideceği ve makinenin zarar görmesi söz konusudur. Gerektiği durumda mildeki fren momenti arttırılarak devir sayısının 3000 rpm’ in üzerine çıkmaması sağlanır. Motor miline uygulanan mildeki fren momenti moment kontrolü ile kademeli olarak arttırılır ve her bir mildeki moment, hız, akım, gerilimler okunup tablo 4.2 oluşturulur. Deney esnasında endüvi akımını ölçen ampermetre ve moment ölçü aletinin uygun kademede olduğuna dikkat edilmelidir. Deney esnasında nominal değerler aşılmamalıdır. Devre enerjisiz bırakıldıktan sonra seri uyarma sargısı direnci (Rs), seri sargı uçları (EF) arasına bağlanan bir ohmmetre ile ölçülür. Rs:………....Ω
, seri sargı uçları (EF) arasına bağlanan bir ohmmetre ile ölçülür. Rs:………....Ω.")
23
Hesaplamalar Alan sargısının jul kaybı: Pcuf =( Ia)2 . Rs
Çıkış gücü: P2 =M л . n 60 Uyarma gücü: Pcuf = V . If Endüvi gücü: Pa = V . Ia Toplam giriş gücü: P1 = V . (Ia + If ) = Pa + Pcuf Endüvi sargılarında oluşan jul kaybı: Pcua = ( Ia)2 . Ra Endüvide indüklenen mekanik güç: Pi = Pa – Pcua P2 Verim: η = P1
 = Pa + Pcuf. Endüvi sargılarında oluşan jul kaybı: Pcua = ( Ia)2 . Ra. Endüvide indüklenen mekanik güç: Pi = Pa – Pcua. P2. Verim: η = P1.")

>")


















