Sunuyu indir
1
DENGELEME HESABI II Doç.Dr. Ş. Hakan KUTOĞLU

2
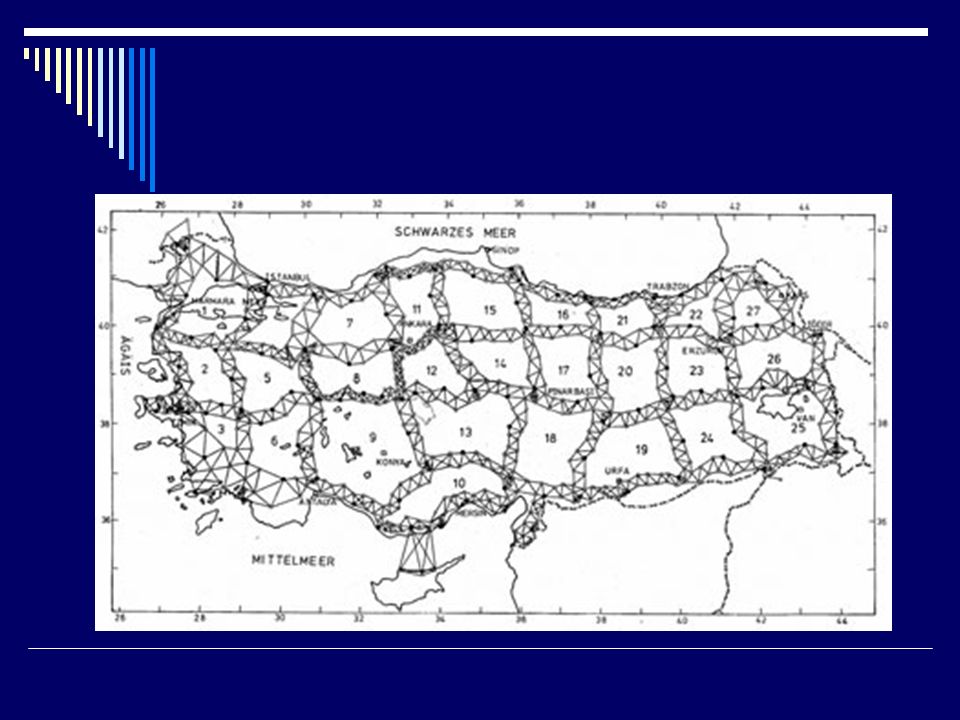
Jeodezik Kontrol Ağları
Bir Referans sisteminin gerçekleştirilebilmesi için o sistemde koordinatı bilinen noktalara ihtiyaç vardır. Referans sistemini gerçekleştirmek amacıyla tesis edilen noktalara “kontrol noktası”, bu noktaların meydana getirdiği yapıya da “kontrol ağları” adı verilir.

3
Jeodezik kontrol ağları üç grupta ele alınabilir:
Yatay kontrol ağları Düşey kontrol ağları Üç boyutlu kontrol ağları

4
Kontrol noktalarının konumunu doğrudan doğruya belirlemek mümkün değildir; dolaylı gözlemler yapmak gerekir. Yatay kontrol ağları:kenar, doğrultu ve açıklık açısı gözlemleri Düşey kontrol ağları: nivelman Üç boyutlu kontrol ağları:kenar, doğrultu, düşey açı veya GPS baz vektörleri

5
Kontrol Ağlarının Datumu
Kontrol ağları üzerinde gerçekleştirilen gözlemler ağın ancak iç geometrisini belirler. Ağın bir koordinat sisteminde konumlandırılabilmesi için gerekli olan parametrelere “dış parametreler” bunların sayısına “datum defekti” adı verilir.

6
Ağ tipi Boyut Gözlem Datum defekti Datum parametreleri Yatay K. Ağı 2
Doğrultu 4 2 öteleme, 1 dönüklük, 1 ölçek Doğrultu, Kenar 3 2 öteleme 1 dönüklük Doğrultu, kenar, azimut 2 öteleme Düşey K. Ağı 1 Yükseklik, farkı 1 öteleme 3 Boy. Ağlar Baz vektörleri 3 öteleme Kenar, doğrultu, düşey açı 3 öteleme, 1 dönüklük

7
Jeodezik Ağların Tasarımını Etkileyen Faktörler
Kullanılacak ölçme yöntemi ve jeodezik model Doğruluk ölçütleri Global doğruluk ölçütleri Lokal doğruluk ölçütleri Güvenirlik Ekonomi

8
Jeodezik Ağların Dengelemesi: Genel Bakış
Yüksek doğruluk gereksinimleri nedeniyle jeodezik ölçmelerde noktalar daima bir ağ mantığı içerisinde ele alınır ve nokta konumları ağ üzerinde gerçekleştirilen ölçülerin bir dengeleme hesabına tabi tutulmasıyla elde edilir.

9
Dengelemenin olabilmesi için gereğinden fazla ölçüye ihtiyaç vardır.
f=serbestlik derecesi n=ölçü sayısı u=bilinmeyen sayısı olmak üzere dengelemenin olabilmesi için f=n-u>0 olmalıdır. f=n-u=0 ise dengelemesiz tek çözüm, f=n-u<0 ise çok sayıda çözüm vardır.

10
Dengeleme hesabı için en ideal yöntem C. F
Dengeleme hesabı için en ideal yöntem C.F. Gauss’un 1894 yılında Almanya Nirengi Ağı dengelemesi için geliştirdiği “En Küçük Kareler Yöntemidir.” EKKY’nin temel ilkesi ölçü hatalarının karelerinin toplamını minimum yapmaktır. vTPv=min.

11
EKKY’ne göre dengeleme
Fonksiyonel model Stokastik model

12
Fonksiyonel Model Ölçülerle bilinmeyenler arasındaki fonksiyonel ilişki lineer olmalıdır. Yoksa gözlem eşitliği Taylor Serisine açılarak lineerleştirilir. Sonuç olarak dengelemenin fonksiyonel modeli v=Ax-l (l=L-F0) şeklinde ifade edilir.
 şeklinde ifade edilir.")
13
Stokastik model Ölçülerin duyarlık tahminleri stokastik model ile belirlenir:

14
Bilinmeyenlerin Hesabı

15
Model testi

16
Parametre testi

17
Uyuşumsuz ölçü testi

18
Güvenirlik 0.3<ri<=0.5 olması istenir.

19
Dış parametrelerin belirlenmesine göre dengeleme türleri
Dayalı (zorlamalı) dengeleme Minimuma dayalı (zorlamasız) dengeleme Serbest ağ dengelemesi Tüm iz minimum Kısmi iz minimum
 dengeleme. Minimuma dayalı (zorlamasız) dengeleme. Serbest ağ dengelemesi. Tüm iz minimum. Kısmi iz minimum.")
20
Dayalı dengeleme Ağın dış parametrelerinin tanımlanabilmesi için daha önceden koordinatı bilinen üst derece noktaların koordinatları bu dengeleme türünde değişmez olarak alınır.

21
Minimuma dayalı dengeleme
Datum defekti sayısı kadar koordinatın sabit alındığı dengeleme türüdür. Ağ iç geometrisi üzerinde herhangi bir zorlama meydana gelmez.

22
Serbest ağ dengelemesi
Bu tür dengelemede hiçbir ağ noktasının koordinatı sabit kabul edilmez. Bütün nokta koordinatlarının hatalar içerdiği düşünülür. Bu durumda dış parametreler belirlenemeyeceğinden Normal denklemler matrisinin rangı r=u-d olur. Yani matrisin Cayley inversi alınamaz. Dış parametrelerin belirlenebilmesi için fonksiyonel modelin yanı sıra ağın tüm noktaları için aşağıdaki koşul denklemleri yazılır: v=Ax-l GTx=0

23
Bir boyutlu ağlar için İki boyutlu ağlar için

24
Üç boyutlu ağlar için

25
Bilinmeyenleri arasında koşul denklemleri bulunan dolaylı ölçüler dengelemesi ilkesine göre

26
Kısmi iz minimum durumunda tüm noktalar yerine uygun bazı noktalara göre koşul denklemleri yazılır:
v=Ax-l BTx=0

27
Bu durumda olur.

28
Yatay Kontrol Ağları YKA’ları Ağın şekline ve Ölçü yöntemine Amaca
Göre sınıflandırılabilirler.

29
Ağın şekline göre sınıflandırma
Çalışmanın amacına veya ekonomisine göre Santral ağ Dörtgen ağ Zincir ağ Karışık ağ

30
Santral Ağ

31
Dörtgen Ağ

32
Zincir ağ

34
Karışık ağ

35
Ölçü yöntemine göre Triangülasyon ağları Trilaterasyon ağları
Trilagon ağları

36
Amaca göre Ülke nirengi ağları (1., 2., 3. derece ağlar, sıklaştırma ağları vs.) Deformasyon izleme ağları Proje ölçmeleri için kurulan ağlar (karayolu, demiryolu vb. için) Fotogrametri ve uzaktan algılama çalışmaları için kurulan kontrol ağları
 Fotogrametri ve uzaktan algılama çalışmaları için kurulan kontrol ağları.")
37
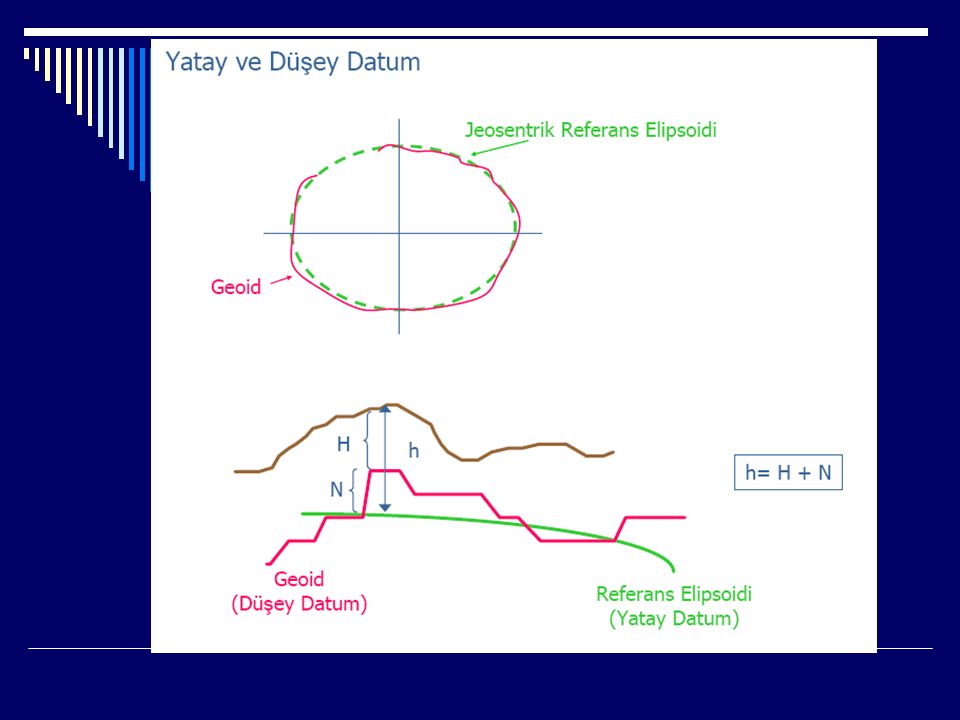
Hesap yüzeyi Elipsoit yüzeyi Harita (projeksiyon) düzlemi Yerel yatay
 düzlemi Yerel yatay")
38
YKA’ların planlaması ve tesisi
Amaca uygun nokta sayısı ve bu noktalar arasındaki gözlemler planlanmalı Aralarında ölçme planlanan noktalar birbirini görmeli Kenarlar gergin olmalı Noktalar mümkün olduğunca ulaşımı olan yerlerde ve uygun zeminlerde tesis edilmeli Nirengi kanavası hazırlanmalı Çalışmanın amacına ve zemine uygun tesis türü seçilmeli Tesis sırasında röper alınmalı, durum ve röper krokileri düzenlenmeli

39
Ölçmeler (Veri toplama)
Doğrultu ölçmeleri Kenar ölçmeleri Astronomik gözlemler

40
Doğrultu ölçmeleri En az 2cc hassasiyetle ölçme olanağı tanıyan aletlerle ve gözleme plakaları veya yansıtıcı prizmalarla gerçekleştirilir.

41
Yatay açı ölçme yöntemleri
Repetisyon yöntemi Seri yöntemi Reiterasyon yöntemi Kombinasyon yöntemi Sektör yöntemi

42
Seri yöntemi Aletin I. Durumunda saat ibresi yönünde planlanan bütün doğrultulara gözlem yapılır.Kontrol için en son başlangıç noktası gözlenir. Son noktada alet II. duruma getirilir ve bu kez saat ibresinin ters yönünde diğer doğrultular gözlenir. Bu şekilde yapılan gözlemler 1 tam seri olarak adlandırılır. Bölümleme hatalarınının etkisini azaltmak için her yeni seriye başlamadan açı tablası d=200g/n kadar döndürülür.

43
Avantajları: Bölüm dairesinin sürüklenme hataları ile alet eksen hataları giderilmiş olur.
Dezavantajı: Gözlem işlemi uzun sürdüğünden atmosferik koşulların değişmesi nedeniyle birtakım hatalar ortaya çıkabilir.

44
0g j K tij k zi x2 x3 x1 l i m

45
Hata Kaynakları Merkezlendirme hataları Yöneltme ve okuma hataları
Aletsel hatalar Atmosferik hatalar İndirgeme hataları

46
Doğrultu ölçmelerinin ön işlemesi
İstasyon dengelemesi Hesap yüzeyine indirgeme

47
İstasyon dengelemesi Tek bir doğrultunun koh Ortalama doğrultunun koh

48
Doğrultuların hesap yüzeyine indirgenmesi
Elipsoit yüzeyi: Çekül sapmaları gerekli Projeksiyon düzlemi: Yerel yatay: doğrudan kullanım

49
Kenar ölçmeleri Tarihsel gelişim sırasına göre kenar ölçme yöntemleri
İnvar tellerle Baz büyütme donanımlarıyla Elektronik uzaklık ölçerlerle GPS tekniğiyle şeklinde sıralanabilir.

50
Kenar ölçmeleri Ağ kenarlarının en az 1/3 ü ölçülmelidir. Çalışmaya bağlı olarak bu sayı daha fazla olabilir. Çalışmaya bağlı olarak kenarların karşılıklı olarak ölçülmesi zorunlu olabilir. Karşılıklı ölçmeler arasındaki farkın ölçülen kenara oranı belli bir sınır değeri (3. der. Sıkl. Ağlarında 1/100000) aşmamalıdır (oransal doğruluk). Kenar ölçmelerinde kullanılan aletin her yıl kalibrasyonu yapılmalıdır.
 aşmamalıdır (oransal doğruluk). Kenar ölçmelerinde kullanılan aletin her yıl kalibrasyonu yapılmalıdır.")
51
Kenar ölçmeleri ön işleme
Duyarlık hesaplamaları Meteorolojik düzeltmeler Geometrik indirgemeler

52
Duyarlık hesaplamaları

53
Meteorolojik düzeltmeler
Hız düzeltmesi Işın yolu eğriliği düzeltmesi

54
Geometrik indirgemeler
Pj D H2 P1 H1 Jeoit Se Elipsoit N P'1 Sºe P'2 r 2θij O

55
Geometrik indirgemeler
Eğim indirgemesi Deniz yüzeyine indirgeme Yeryüzü eğriliği düzeltmesi Elipsoide indirgeme Projeksiyon (harita) düzlemine indirgeme
 düzlemine indirgeme.")
56
Deniz yüzeyindeki uzunluk

57
Projeksiyon düzlemindeki uzunluk

58
Ölçme yeri : İTÜ Kampüsü Alet ve Seri No: PTS10 741732
Tarih : Alet içi Kırılma indisi (no): Hava durumu: Açık Ngr : Operatör: Hakan Kutoğlu Yansıtıcı tipi:Üçlü beşgen prizma Yazıcı : Ertürk Özdemir Sıfır Noktası Eki (Ko):0.029m Alet Yansıtıcı Ölçülen uzunluklar (m) Nokta no 502 503 645 120 Sehpa yüksekliği iE=1.500 Tp=1.690 120 Nokta kotu Ho=93.352 HB=78.779 120 Muylu kotu Hi=94.912 Hk=80.329 121 DH=Hk-Hi 119 R+Hi= Hi =D/(R+Hi) x10-4 Meteorolojik ölçüler Alet Yansıtıcı Ortalama Kuru sıcaklık (t) C 27.0 Islak sıcaklık(t’) C 31.1 Basınç mm Hg 757.5 18.77 15.81 D’ort= m Hız düzeltmesi 0.0083 Sıfır noktası eki Ko -0.029 Düzeltimiş eğik uzunluk D=D’+Ko+K1 Deniz yüzeyinde uzunluk Projeksiyon indirgemesi 0.0535 Projeksiyon düzlemindeki uzunluk
: Hava durumu: Açık Ngr : Operatör: Hakan Kutoğlu Yansıtıcı tipi:Üçlü beşgen prizma. Yazıcı : Ertürk Özdemir Sıfır Noktası Eki (Ko):0.029m. Alet. Yansıtıcı. Ölçülen uzunluklar (m) Nokta no Sehpa yüksekliği. iE= Tp= Nokta kotu. Ho= HB= Muylu kotu. Hi= Hk= DH=Hk-Hi R+Hi= Hi =D/(R+Hi) x10-4. Meteorolojik ölçüler. Alet. Yansıtıcı. Ortalama. Kuru sıcaklık (t) C Islak sıcaklık(t’) C Basınç mm Hg D’ort= m. Hız düzeltmesi Sıfır noktası eki Ko Düzeltimiş eğik uzunluk D=D’+Ko+K Deniz yüzeyinde uzunluk Projeksiyon indirgemesi Projeksiyon düzlemindeki uzunluk")
59
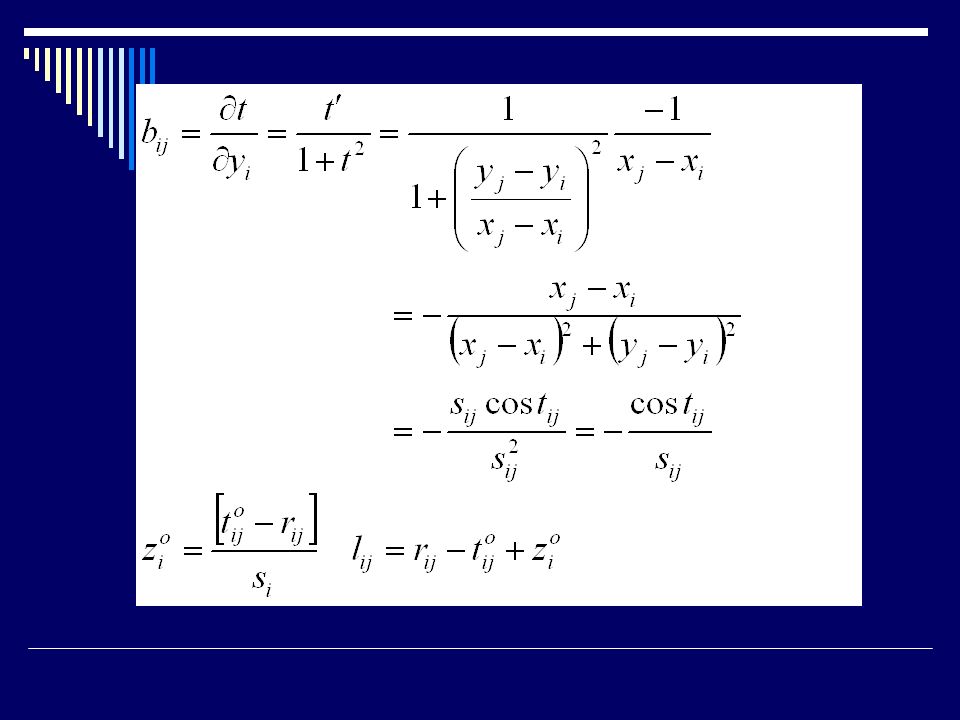
Doğrultu kenar ağı dengelemesi
Doğrultular için fonksiyonel model: Kenarlar için fonksiyonel model:

60
Doğrultular için düzeltme denklemi

62
Doğrultular için düzeltme denklemi
Yöneltme bilinmeyenleri Schreiber veya Gauss toplam yöntemlerinden biriyle elemine edilebilir.

63
Gauss toplam yönteminde

64
Kenar ölçmeleri için düzeltme denklemleri

65
Stokastik model Doğrultular için Kenarlar için

66
ya istasyon dengelemesinden bulunan değer olarak alınır ya da Ferrero bağıntısıyla bulunur:

67
Düşey Kontrol Ağları Referans yüzeyi jeoittir.

68
3 boyutlu uzayda Geoit

70
Gözlemler Ağ noktaları arasındaki yükseklik farklarıdır.

71
Yükseklik farklarını elde etmede kullanılan ölçü yöntemleri
Düşey açı ölçmeleri Geometrik nivelman Presizyonlu nivelman GPS nivelmanı

72
Düşey açı ölçmeleri ile yükseklik farkı belirleme
Düşey açı ölçmeleri trigonometrik yöntemle kontrol noktalarının yükseklik farklarının belirlenmesi amacıyla gerçekleştirilirler. <doğrultu ölçmelerinde kullanılan aletlerle yine seri yöntemi ilkesine göre ölçülürler.

73
R Tp-iE D'ij Tp Z''ij iE Z'ij ε Dij A Pj iE Δhij Dij Pi

74
Önce kenar ölçüsü yapılan noktalardaki yükseklik farkları belirlenir:
D: meteorolojik düzeltme getirilmiş eğik uzunluk z’: ölçülen düşey açı iE: Elektronik ölçme aletinin yüksekliği Tp: bakılan noktada yansıtıcı yüksekliği

75
Eğik kenar ölçmeleri yapılan noktalar arasındaki yatay mesafeler bulunur

76
Sinüs bağıntısıyla diğer noktalar arasındaki yatay mesafeler hesaplanır.

77
Düşey açılar zemine indirgenir

78
Yatay mesafeler ve zemine indirgenmiş düşey açılar kullanılarak yükseklik farkları bulunur

79
Geometrik Nivelman

80
A B

81
Presizyonlu (Hassas) nivelman
Klasik geometrik nivelman yöntemi ve donatımı ile yükseklik farkı belirlemede ±1mm/km presizyondan daha yüksek duyarlığa ulaşılamaz. Presizyonlu nivelman tekniğinde ise yükseklik farkları ±0.5mm/km duyarlıkla belirlenebilmekte, düzenli hata kaynaklarına karşı etkin önlemler alındığında ise presizyon daha da yükseltilebilmektedir.

82
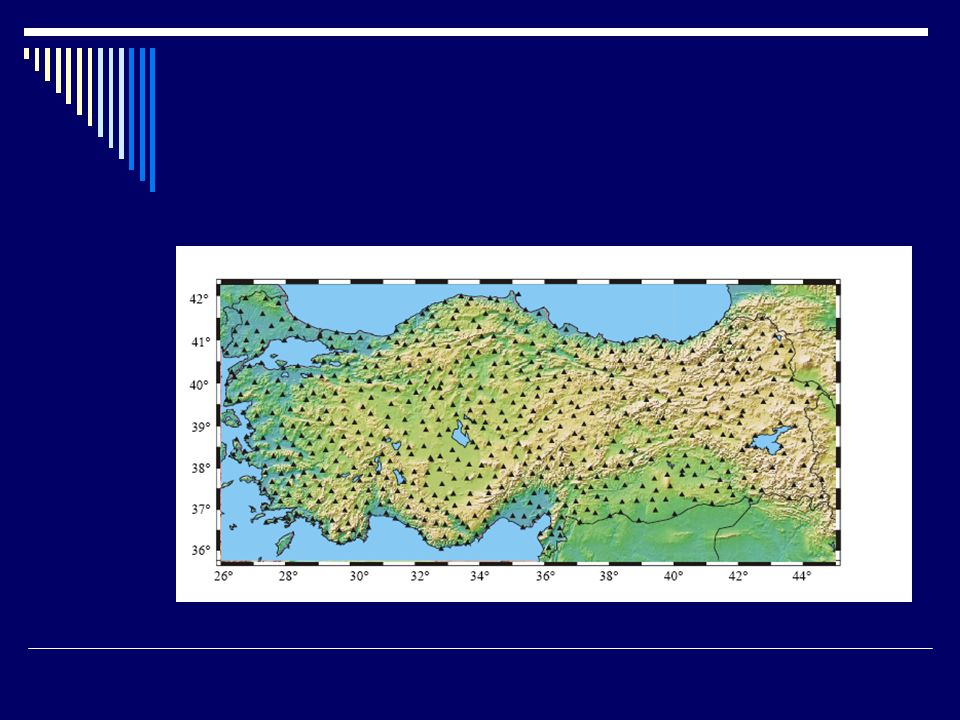
Uygulama alanları Fiziksel yeryüzünü ve jeoidi belirlemeye yönelik çalışmalar Ülke nivelman ağının oluşturulması Yerkabuğu düşey hareketlerinin belirlenmesi Köprü, baraj gibi önemli mühendislik yapılarının deformasyonlarının incelenmesi Önemli yapıların aplikasyonu Yer altı maden işletmelerinin yeryüzündeki etkilerinin incelenmesi

83
Ölçme donatımı Mira Nivo Mira altlığı Mira destekleme donatımı

84
Miralar Bir çift “invar” mira kullanılır.
Koruyucu kasaları sert ağaç ya da metalden yapılır. Kasa içinde 25mm genişlikte ve 1mm kalınlıkta bir invar şerit bulunur. İnvar şerit altta çelikten mira taban demirine sabitlenmiş altta ise bir kaldıraca bağlanmıştır. Kaldıraçta ortasından kasaya mesnetliyken sonda bir germe yayına bağlanmıştır.

85
Kaldıraç Germe yayı Mira kasası İnvar şerit

86
İnvar şeridin en büyük özelliği termik uzama katsayısı çok küçük olan (1.5m/mC) ve nemli ortamdan etkilenmeyen nikel, demir ve çeşitli metaller içeren bir alaşımdan yapılmış olmasıdır.
 ve nemli ortamdan etkilenmeyen nikel, demir ve çeşitli metaller içeren bir alaşımdan yapılmış olmasıdır.")
87
Türkiye Ulusal Düşey Kontrol Ağı

88
Nivelman Ağı Dengelemesi
Fonksiyonel model Düzeltme denklemi

89
Trigonometrik nivelman için:
Stokastik model Trigonometrik nivelman için: Trigonometrik nivelman bağıntısında en büyük hata kaynağı düşey açı ölçmesine aittir. Bu nedenle ilgili bağıntı düşey açı ölçmesine göre hata yayılmasına açılır. Eşitlik So=1 km birim uzunluğu için düzenlenir ve ağırlık tanımı gereği her iki ifade oranlanırsa elde edilir.

90
Geometrik nivelman için:
d n 2 1 S

91
Eşitlik So=1 km birim uzunluğu için düzenlenir
ve ağırlık tanımı gereği her iki ifade oranlanırsa elde edilir.

92
Presizyonlu nivelman için:
Presizyonlu nivelmanda da geometrik nivelman için çıkarılan stokastik model geçerlidir. Ancak geometrik ve presizyonlu nivelman gözlemlerinin aynı dengeleme probleminde yer alması durumunda, presizyonlu nivelman ağırlıkları için bağıntı 10 gibi bir değerle çarpılabilir.
















 ÖLÇÜLMESİ>")


>")

