Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
DERİNLİK ÖLÇÜMÜ (İSKANDİL)
Sualtı tabanının topografik durumunu belirlemek amacıyla su yüzeyine dik doğrultuda (çekül doğrultusunda) derinlik ölçmeleri yapılır. Bu işleme hidrografide iskandil , derinliği ölçülen veya derinlik ölçmesi yapılan noktaya da iskandil noktası denir. İskandil, klasik haritacılıktaki nivelman ile eş anlamlıdır. Ancak iskandilde uygulanan yöntemler ve kullanılan araçlar tamamen farklıdır. Burada sualtı tabanını görmek mümkün olmadığından genellikle önceden saptanan doğrultular üzerinde ve belirli aralıklarla ölçmeler yapılır ve elde edilen derinlik değerleri o andaki su seviyesi ile ilgilidir.
 derinlik ölçmeleri yapılır. Bu işleme hidrografide iskandil , derinliği ölçülen veya derinlik ölçmesi yapılan noktaya da iskandil noktası denir. İskandil, klasik haritacılıktaki nivelman ile eş anlamlıdır. Ancak iskandilde uygulanan yöntemler ve kullanılan araçlar tamamen farklıdır. Burada sualtı tabanını görmek mümkün olmadığından genellikle önceden saptanan doğrultular üzerinde ve belirli aralıklarla ölçmeler yapılır ve elde edilen derinlik değerleri o andaki su seviyesi ile ilgilidir.")
2
DERİNLİK ÖLÇÜMÜ (İSKANDİL)
Derinlik değerleri haritaya işlenmeden önce yönteme, alete ve su ortamına bağlı olarak düzeltmeler uygulanır ve daha sonra ortak bir su seviyesine indirgenir. Derinlik ölçmesi, kullanılan alete göre ya bir operatör tarafından bizzat yapılır veya bir alet tarafından otomatik olarak gerçekleştirilir. İskandilde kullanılan alete göre derinlik değerleri ya doğrudan okunur ya da dolaylı olarak elde edilir. İskandil yöntemleri; tarihi gelişim veya alet konstrüksiyonlarının tamlığı yönünden, klasik yöntemler ve modern yöntemler diye iki gruba ayrılabilir:

3
DERİNLİK ÖLÇÜMÜ (İSKANDİL)
1. Klasik yöntemler a- Lata iskandili, b- İp iskandili, c- Tel (mekanik) iskandil. d- Hidrostatik iskandil, e- Termometrik iskandil, 2. Modern Yöntemler a- Akustik iskandil, b- Laser (Lidar) iskandili
 iskandil. d- Hidrostatik iskandil, e- Termometrik iskandil, 2. Modern Yöntemler. a- Akustik iskandil, b- Laser (Lidar) iskandili.")
4
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Lata İskandili İskandil lataları, metre uzunluğunda, cm çapında daire ya da çokgen kesitli ahşap veya hafif metalden yapılmış çubuklardır. İskandil lataları, desimetre bölümlü olup okumaların kolaylaştırılması amacıyla renklendirilmiştir. Latanın suya kolay dalmasını sağlamak, fakat yumuşak zeminlere batmasını önlemek amacıyla ucuna metal bir başlık takılmıştır. Tabandan numune alınması gerektiğinde bu başlıktan yararlanılır veya zeminden parça koparan özel bir başlık takılır. Sığ sularda uzun lata boyunun ortaya çıkardığı kullanma güçlüğünü azaltmak için birbirine eklenebilen latalar yapılmıştır.

5
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Lata iskandil, duran bir taşıttan uygulandığı gibi hareket halindeki bir bot üzerinden de uygulanabilir. Uygulamada ; Lata düşey doğrultuya girmeden okuma yapılmamasına, Lata ucunun taban zeminine batırılmamasına, Ölçmelerin botun daima aynı yerinden yapılmasına, Bot hızının ölçme işlemini güçleştirmeyecek ve inceliği etkilemeyecek değerde olmasına (örneğin, bot hızı v < 1.0 m/s olmasına ) dikkat edilmelidir. Lata iskandilinde en önemli hata, operatörün kişisel hatalarıdır. Bu hatalar, operatörün yukarıda belirtilen hususlara tam dikkat etmemesinden doğan hatalar ile okuma yanlışlıklarıdır.
 dikkat edilmelidir. Lata iskandilinde en önemli hata, operatörün kişisel hatalarıdır. Bu hatalar, operatörün yukarıda belirtilen hususlara tam dikkat etmemesinden doğan hatalar ile okuma yanlışlıklarıdır.")
6
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Aletsel hata olarak yalnızca lata bölümleri hatası vardır. Ancak bu hata, diğer hata kaynakları yanında genellikle ihmal edilebilecek kadar küçüktür. Su ortamından kaynaklanan hatalar da; su yüzeyi dalgalarının okumaya etkisi ve su içi akıntılarının lata konumuna etkisidir. Ayrıca bot hızının büyük olması ve sualtı tabanının cinsi ve bitki örtüsü ölçmeleri etkileyen diğer etkenlerdir. Lata bölümlerinin okuma inceliği ±2 cm olmasına karşın, latanın tam düşey doğrultuya sokulamaması nedeniyle yöntemin inceliği ±5-10 cm olarak kabul edilir. Lata iskandili, derinliği 5 metreyi geçmeyen sığ ve küçük her türlü su ortamında uygulanabilir. Ancak verimi çok azdır.

7
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
İp İskandili İp iskandilinde ölçme aracı olarak iyi cins keten, kenevir veya sentetik liflerden özel olarak örülmüş ipler kullanılır. İpin suya batmasını ve kısa sürede düşey doğrultuya girmesini sağlamak amacıyla ucuna metal bir ağırlık bağlanır. Bu ağırlık, suyun derinliğine ve su içindeki akıntının hızına bağlı olarak kg arasında değişir. İskandil ipinin zamanla boy değiştirmesini azaltmak amacıyla bölümlendirme yapılmadan önce, bir gün kadar su içinde bekletilir ve daha sonra iki direk arasına gerilerek kurumaya bırakılır. İp kurutulduktan sonra, üzerine belirli aralıklarla ( genellikle 20 cm ) renkli kumaş, deri parçaları veya pirinç plakalar bağlanarak bölümlendirilir. İpin boyu, her ölçme işleminden önce ve sonra kontrol edilir. Sualtı tabanından örnek alınması istendiğinde özel ağırlıklar kullanılır. Bu ağırlıkların altında bir oyuğa yapışkan balmumu veya kalın yağ sürülerek örnek alınabileceği gibi, özel örnek kapları da bulunabilir.
 renkli kumaş, deri parçaları veya pirinç plakalar bağlanarak bölümlendirilir. İpin boyu, her ölçme işleminden önce ve sonra kontrol edilir. Sualtı tabanından örnek alınması istendiğinde özel ağırlıklar kullanılır. Bu ağırlıkların altında bir oyuğa yapışkan balmumu veya kalın yağ sürülerek örnek alınabileceği gibi, özel örnek kapları da bulunabilir.")
8
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ

9
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Bu tür uygulamada, ipin yukarı çekilip ağırlığın tekrar fırlatılması için geçecek süre içinde botun ardışık iskandil noktasına henüz gelmemiş olması gerekir. Hidrografi botunun hızı, suyun derinliğine ve harita ölçeğine bağlı olarak saptanır. Derinlik arttıkça, ağırlığın sualtı tabanına inmesi ve ipin yukarı çekilmesi (toplanması) için geçecek süre artacağından botun hızı azaltılır. Harita ölçeği büyüdükçe iskandil noktalarının ara uzaklıkları küçüleceğinden bot hızı azaltılır. Hidrografi botunun harita ölçeğine bağlı hız değerleri şöyle verilmektedir: Harita Ölçeği /2000 1/5000 1/ / /40000 Ortalama Bot Hızı [m/s] Çalışma ortamındaki suyun akıntılı olması durumunda iskandil ipinin, akıntı nedeniyle bükülerek sonucu önemli ölçüde etkilemesini önlemek amacıyla derinlik ölçmesi, hareketli bot üzerinden yapılır. Botun akıntı yönünde ve akıntının karşı yönünde hareket etmesi durumlarında, uygulama düzeni ve iskandil ipinin bükülmesi aşağıdaki şekilde şematik olarak görülmektedir.
 için geçecek süre artacağından botun hızı azaltılır. Harita ölçeği büyüdükçe iskandil noktalarının ara uzaklıkları küçüleceğinden bot hızı azaltılır. Hidrografi botunun harita ölçeğine bağlı hız değerleri şöyle verilmektedir: Harita Ölçeği 1/2000 1/5000 1/ / /40000 Ortalama Bot Hızı [m/s] Çalışma ortamındaki suyun akıntılı olması durumunda iskandil ipinin, akıntı nedeniyle bükülerek sonucu önemli ölçüde etkilemesini önlemek amacıyla derinlik ölçmesi, hareketli bot üzerinden yapılır. Botun akıntı yönünde ve akıntının karşı yönünde hareket etmesi durumlarında, uygulama düzeni ve iskandil ipinin bükülmesi aşağıdaki şekilde şematik olarak görülmektedir.")
10
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ

11
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Derinliği 30 metreden az ve akıntısız sularda yöntemin inceliği, ±10 cm olarak kabul edilir. İnceliği etkileyen hata kaynakları: 1- Su Ortamının Neden Olduğu Hatalar Su içinde akıntı nedeniyle ipin bükülmesi önlenemeyeceğinden derinlik ölçülerinde bir miktar hata oluşur. Bu hata derinlikle doğrusal olarak bağlı değildir. İpin akıntı nedeniyle bükülmesini azaltmak için, ucundaki ağırlık bir miktar arttırılır Akıntının neden olduğu derinlik hatasının akıntının yönüne bağlı olmadığı, buna karşılık akıntı hızına, suyun derinliğine ve iskandil ağırlığına bağlı olduğu saptanmıştır Su yüzeyinin dalgalı olması veya bot hızının neden olduğu dalgalar, derinlik ölçümlerini dolayısıyla inceliği etkiler. Bu nedenle su üzerindeki çalışmaların, dalgasız ya da az dalgalı havalarda yapılması, ayrıca ölçmelerin botun dalga etkisinin az olduğu kısmından (genellikle orta kısmından) yapılması gerekir.
 yapılması gerekir.")
12
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
2- Operatörün Neden Olduğu Hatalar İp iskandilinde en önemli hata kaynağını kişisel hatalar oluşturur. Bu hatalar şunlardır: - İp düşey konuma gelmeden okuma yapılması, -İpin fazla sağılan kısmı çekilmeden okuma yapılması, - Botun değişik yerlerinden okuma yapılması, - Okuma hataları

13
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
3- Aletsel Hatalar İp iskandilinde en önemli aletsel hata kaynağı, ip boyunun zamanla değişmesidir. İp boyundaki değişme, ip üzerindeki derinlik değerlerini etkilediğinden ölçülerde sistematik bir hata olur. Hatanın etkisini en aza indirmek için; - Özel şekilde örülmüş iyi cins ipler kullanılmalı, - İpin boyunu, ölçmelerden önce ve sonra kontrol ederek gerekirse ölçülere düzeltme getirilmeli, - İp ucuna bağlanan ağırlığın kütlesi uygun seçilmelidir.

14
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Tel İskandil ( Mekanik İskandil ) Lata ya da ip kullanmak suretiyle yapılan derinlik ölçmeleri yorucu ve zaman alıcı olduğundan, özellikle 30 metreden daha derin sularda tel iskandili uygulanır. Bu yöntemde ölçme aracı, ucuna ağırlık bağlanmış bir teldir. Telin sağılmasını ve özellikle sarılmasını kolaylaştırmak ve hızlandırmak amacıyla bir makara sisteminden yararlanılır. Şekilde, A: çelik telin sarıldığı makara, B:yardımcı makara, P: İskandil ağırlığıdır. Yardımcı makaranın çevresi önceden ölçülmüş olup bellidir. Dolayısıyla devir sayısı sayılarak sağılan telin uzunluğu belirlenir.
 Lata ya da ip kullanmak suretiyle yapılan derinlik ölçmeleri yorucu ve zaman alıcı olduğundan, özellikle 30 metreden daha derin sularda tel iskandili uygulanır. Bu yöntemde ölçme aracı, ucuna ağırlık bağlanmış bir teldir. Telin sağılmasını ve özellikle sarılmasını kolaylaştırmak ve hızlandırmak amacıyla bir makara sisteminden yararlanılır. Şekilde, A: çelik telin sarıldığı makara, B:yardımcı makara, P: İskandil ağırlığıdır. Yardımcı makaranın çevresi önceden ölçülmüş olup bellidir. Dolayısıyla devir sayısı sayılarak sağılan telin uzunluğu belirlenir.")
15
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ

16
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Diğer yöntemlerde olduğu gibi tel iskandilde de hata kaynakları; - Su ortamının neden olduğu hatalar, - Operatör hataları, - Alet hataları olmak üzere 3 grupta toplanır. Tel iskandil, metre arasındaki derinliklerde uygulanır. Akıntı olması durumunda, ip iskandilindeki gibi özel ölçme yöntemi uygulanamadığından, ölçülerde yanlışlık (kaba hata) mertebesine ulaşan hatalar oluşur. Hidrografi botunun her iskandil noktasında durması nedeniyle operatör hataları, aletin geliştirilmiş yapısı nedeniyle de alet hataları, su ortamından kaynaklanan hatalar yanında ihmal edilebilir. Örneğin, alet üzerindeki derinlik sayacı yardımıyla sağılan telin boyu ± 1 cm incelikle okunabilir. Ancak yöntemin inceliği, derinliğe bağlı olarak ±0.01 H metre kabul edilir.
 mertebesine ulaşan hatalar oluşur. Hidrografi botunun her iskandil noktasında durması nedeniyle operatör hataları, aletin geliştirilmiş yapısı nedeniyle de alet hataları, su ortamından kaynaklanan hatalar yanında ihmal edilebilir. Örneğin, alet üzerindeki derinlik sayacı yardımıyla sağılan telin boyu ± 1 cm incelikle okunabilir. Ancak yöntemin inceliği, derinliğe bağlı olarak ±0.01 H metre kabul edilir.")
17
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Bu aletlerin çalışma ilkesi, basit bir çıkrık sistemine benzer. Ölçme aracı olarak mm çapında kopma mukavemeti yüksek, galvanizli çelikten yapılmış paslanmaz teller kullanılır. Tel, makara veya disk üzerine sarılır. Ölçme işleminde telin sağılan uzunluğu, makaranın devir sayısını gösteren bir sayaç yardımıyla belirlenir. Mekanik iskandil aletlerinin bazılarında telin hızlı ve fazla sağılmasını kontrol eden otomatik fren donatımı vardır. Tel ucundaki ağırlık, sualtı tabanına ulaştığında, tel üzerindeki germe kuvveti azalacağından fren donatımı harekete geçerek telin fazla sağılması önlenir. Su derinliğine ve akıntının hızına bağlı olarak tel ucuna kg arasında değişen ağırlıklar bağlanır. İskandil aleti, botun veya geminin uygun bir yerine ve bir platform üzerine yerleştirilir. Telin kopma olasılığı iplere göre daha fazla olduğundan, ip iskandilindeki gibi ileri fırlatılması söz konusu değildir. Bu nedenle hidrografi taşıtı, her iskandil noktasında ölçme işlemi tamamlanıncaya kadar durmak zorundadır.

18
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Hidrostatik İskandil Sualtı tabanında ölçülen hidrostatik basınç yardımıyla derinliğin belirlenmesi, yöntemin temel ilkesini oluşturur. İskandil aleti olarak hidrostatik basınç ölçerler kullanılır. Alet, ölçme yapılacak noktada bir ip veya tel yardımıyla sualtı tabanına indirilerek o noktadaki su derinliğinin fonksiyonu olarak hidrostatik basınç ölçülür. Hidrostatik iskandil, dolaylı sonuç veren bir yöntemdir. Hidrostatik iskandil aleti, metreye kadar olan derinliklerde kullanılır ve ortalama inceliği ± 3-5 metredir. Derinlik arttıkça incelik azaldığından derin sular için ya da hassas ölçmeler için uygun bir alet değildir. Sürekli ve hızlı ölçmeye olanak vermediğinden günümüzde pratik değeri kalmamıştır.

19
KLASİK DERİNLİK ÖLÇME YÖNTEMLERİ
Termometrik İskandil Sualtı tabanında aynı noktada sıcaklık ve basınç ölçmek suretiyle derinliğin bulunması yöntemin temel ilkesini oluşturur. Termometrik iskandil aleti olarak bir plaka üzerinde yan yana yerleştirilmiş iki basit termometre kullanılır. Termometrelerden biri su basıncına karşı kalın bir cam koruyucu tüpü içine alınmış, diğeri ise açıktır. Termometrik yöntem, özellikle 1000 metre ve daha derin sularda uygulanır. Bu yöntemde sağlanan incelik ± H metredir. Uygulama sırasında sarkıtma telinin ya da ipinin akıntı nedeniyle bükülmesinin derinlik değeri üzerinde önemli etkisi yoktur. Termometrik iskandil, sürekli ve hızlı çalışmaya olanak vermediğinden günümüzde pratik değeri kalmamıştır.

20
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Akustik İskandil Ses dalgalarının su içinde yayılma ve yansıma özelliklerinden yararlanılarak derinliklerin ölçülmesi yöntemin temel ilkesidir. Su içindeki bir ses üretecinden sağlanan ve düşey doğrultuda yöneltilen ses impulsları, dalgalar halinde yayılarak sualtı tabanına ulaşırlar ve buradan da yansıyarak tekrar su yüzeyine gelirler. Ses dalgalarının su içindeki yayılma hızı V bilindiğinden, impulsların gidiş - dönüş seyir süresi t ölçülerek su derinliği, bağıntısından bulunur.

21
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

22
DERİNLİK ÖLÇÜMÜ (İSKANDİL

23
SESİN SU İÇİNDE YAYILMA HIZI
Ses dalgaları su içinde yansıma, kırılma ve yutulma gibi fiziksel kanunlara uyarak yayılırlar. Sesin su içinde yayılma hızı suyun yoğunluğuna, başka bir deyişle sıcaklığına, tuzluluğuna ve derinliğine (Basıncına) bağlı olarak değişir. Ses dalgalarının su içindeki yayılma hızı; V = 1 / k bağıntısı ile belirlenir. Burada; k : suyun yoğunluğu, : suyun geçirgenliğidir. Derinliğe inildikçe k ve değerleri değiştiğinden yukarıdaki bağıntıya göre bulunacak hız bölgesel koşullara uygun olmaz. Bu nedenle normal koşullardaki ( t=0 0C su sıcaklığı, s=%035 tuzluluk ve h=0m veya p=760mm Hg basıncı ) ses hızı ortamındaki koşullara uygun olarak düzeltilir.
 bağlı olarak değişir. Ses dalgalarının su içindeki yayılma hızı; V = 1 / k bağıntısı ile belirlenir. Burada; k : suyun yoğunluğu, : suyun geçirgenliğidir. Derinliğe inildikçe k ve değerleri değiştiğinden yukarıdaki bağıntıya göre bulunacak hız bölgesel koşullara uygun olmaz. Bu nedenle normal koşullardaki ( t=0 0C su sıcaklığı, s=%035 tuzluluk ve h=0m veya p=760mm Hg basıncı ) ses hızı ortamındaki koşullara uygun olarak düzeltilir.")
24
SESİN SU İÇİNDE YAYILMA HIZI
Su ortamının maksimum ve minimum yoğunluğuna göre sesin yayılma hızı m/s arasındadır. Bölgesel koşullar için ses hızının genel bağıntısı, Vt,s,p = V0 + Vt + Vs + Vp + Vt,s,p biçiminde verilmektedir. Burada; Vt,s,p : sıcaklığı t, tuzluluğu s ve basıncı p olan suda sesin yayılma hızı, V : normal koşullardaki suda sesin yayılma hızı, S. Kuwahara’ya göre V0 = m/s W. D. Wilson’a göre V0 = m/s’dir. Vt , Vs , Vp : normal koşullar dışında V0 değerine uygulanacak düzeltmeler Vt,s,p : her üç verinin ( t,s,p ) aynı anda değişmesi halinde ek düzeltme anlamındadır. Bu bağıntıdan elde edilecek hız değerindeki duyarlık 0.3 m/s kadardır.
 aynı anda değişmesi halinde ek düzeltme anlamındadır. Bu bağıntıdan elde edilecek hız değerindeki duyarlık 0.3 m/s kadardır.")
25
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Ses Enerjisinin Yöneltilmesi Demetlenmemiş bir ses enerjisi su içinde küresel bir yüzey şeklinde her yöne yayıldığından, bu tür bir ses enerjisi ile iskandil yapılmaz. Frekansı, 16 Hz ile Hz (16 KHz) arasında olan seslere işitilebilir ses ya da sonik ses denir. Bunların dalga boyları büyük olduğundan enerjilerinin dar bir alan içinde demetlenmesi olanak dışıdır. Buna karşılık su içinde dağılma ve yutulma tehlikeleri azdır ve derin denizlerin iskandilinde tercih edilirler. Frekansı 16 KHz ile 10 GHz arasındaki seslere ultra ses denir. 10 MHz frekans değerine kadar, sesin yayılmasında hiç bir dispersiyon olayı ortaya çıkmaz.
 arasında olan seslere işitilebilir ses ya da sonik ses denir. Bunların dalga boyları büyük olduğundan enerjilerinin dar bir alan içinde demetlenmesi olanak dışıdır. Buna karşılık su içinde dağılma ve yutulma tehlikeleri azdır ve derin denizlerin iskandilinde tercih edilirler. Frekansı 16 KHz ile 10 GHz arasındaki seslere ultra ses denir. 10 MHz frekans değerine kadar, sesin yayılmasında hiç bir dispersiyon olayı ortaya çıkmaz.")
26
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Dolayısıyla bu frekanslar için sesin yayılma hızı yeter derecede sabittir. Ultra seslerin dalga boyları küçük olduğundan ( λ = V / f ) bunların dar bir alan içinde demetlenmesi ve yöneltilmesi mümkündür. Demetlenmiş bir ultra ses, şekilde görüldüğü gibi koni şeklinde hacimsel bir yüzey içinde yayılır. Ultra seslerin iyi demetlenme ve yöneltilme özelliğine karşın, su içinde fazla miktarda yutulduklarından enerjilerini önemli oranda kaybederler. Bu nedenle derin sularda kullanılmazlar; fakat sığ sularda incelikli bir iskandile olanak sağlarlar. Fazla eğimli zeminlerde ise, yansıma dolayısıyla, enerjilerinin önemli bir kısmı alıcıya ulaşamaz.
 bunların dar bir alan içinde demetlenmesi ve yöneltilmesi mümkündür. Demetlenmiş bir ultra ses, şekilde görüldüğü gibi koni şeklinde hacimsel bir yüzey içinde yayılır. Ultra seslerin iyi demetlenme ve yöneltilme özelliğine karşın, su içinde fazla miktarda yutulduklarından enerjilerini önemli oranda kaybederler. Bu nedenle derin sularda kullanılmazlar; fakat sığ sularda incelikli bir iskandile olanak sağlarlar. Fazla eğimli zeminlerde ise, yansıma dolayısıyla, enerjilerinin önemli bir kısmı alıcıya ulaşamaz.")
27
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

28
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Ses enerjisinin yöneltilmesi, frekanstan başka ses üretecinin karakteristiğine, başka bir deyişle su ile temas eden gönderici diyaframın biçimine ve büyüklüğüne bağlıdır. Daire şeklindeki bir diyafram için ses konisinin α/2 tepe açısı, eşitliğinden hesaplanır. Burada, V :sesin su içindeki hız (m/s) λ :sesin dalga boyu (m) D:diyafram çapı f : sesin frekansı (1/s) anlamındadır.
 λ :sesin dalga boyu (m) D:diyafram çapı. f : sesin frekansı (1/s) anlamındadır.")
29
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Uygun bir yöneltme diyaframının çapı, göndereceği sesin dalga boyunun 8 ile 10 katı olması gerektiğinden, sonik frekanslı aletlerin transdüseri (alıcı-verici aygıtı) çok büyük olur. Bu nedenle de kullanışlı değillerdir. Sonik frekanslı sesler basit veya mekanik üreteçlerle elde edilmelerine karşılık, ultra sesler için magnetostriktif veya piezoelektrik ilkesine göre çalışan modern ses üreteçleri kullanılır.
 çok büyük olur. Bu nedenle de kullanışlı değillerdir. Sonik frekanslı sesler basit veya mekanik üreteçlerle elde edilmelerine karşılık, ultra sesler için magnetostriktif veya piezoelektrik ilkesine göre çalışan modern ses üreteçleri kullanılır.")
30
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Soru: Akustik iskandil için 16 mm çaplı daire kesitli bir diyaframdan, frekansı 12 Mhz, hızı 1510 m/s olan ses dalgaları gönderiliyor. Gönderilen sesin dalga boyunu ve ses konisinin tepe açısını bulunuz.

31
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Akustik İskandil Aletleri Akustik iskandil aletleri genellikle, gönderici - alıcı ünitesi ile kontrol - kayıt ünitesi olmak üzere iki ana üniteden oluşur. 1. Gönderici - Alıcı Ünite (Transdüser) Su içinde bulunan bu ünite, gönderici ve alıcı olarak çalışan aynı özellikte iki ses üretecinden oluşur. Üreteçler, amaca göre ya bir koruyucu içinde yan yana bulunur ya da hidrografi taşıtının sağ ve sol karinasında ayrı yerlere tespit edilir. Gönderici durumundaki ses üreteci (transmitter), suya belirli frekanslarla ses impulsları verir. Dalgalar halinde yayılan ve sualtı tabanından yansıyarak geri dönen impulslar alıcı durumundaki üreteç tarafından tespit edilir.
 Su içinde bulunan bu ünite, gönderici ve alıcı olarak çalışan aynı özellikte iki ses üretecinden oluşur. Üreteçler, amaca göre ya bir koruyucu içinde yan yana bulunur ya da hidrografi taşıtının sağ ve sol karinasında ayrı yerlere tespit edilir. Gönderici durumundaki ses üreteci (transmitter), suya belirli frekanslarla ses impulsları verir. Dalgalar halinde yayılan ve sualtı tabanından yansıyarak geri dönen impulslar alıcı durumundaki üreteç tarafından tespit edilir.")
32
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
2. Kontrol - Kayıt Ünitesi (Ekograf) Suya verilen ses impulsları ile geri dönen ve belirli oranda kuvvetlendirilen impulsların karşılaştırılması kontrol ünitesinde yapılır. Bu karşılaştırma sonucu impulsların t seyir süresi elektronik olarak saptanır. Kontrol ünitesi belli bir ses hızı değerine ayarlanmış olduğundan sonuç, H=t*V/2 ifadesine uygun olarak ya bir ışıklı göstergeye aktarılır, ya da mekanik enerjiye dönüştürülerek kayıt ünitesinde bulunan çizici bir uca iletilir. Çizici uç, kontrol ünitesinin elektriksel uyarılarına göre özel kayıt kağıdı üzerine belirli bir ölçekte derinlikleri işaretler. Kayıt kağıdı belirli bir hızda hareket ettirilebildiğinden, ünitelerin sürekli çalıştırılması ve hidrografi taşıtının hareketli olması durumunda, sualtı tabanının sürekli bir profili (grafiği) elde edilir. Hidrografi gemilerinde genellikle gönderici - alıcı ünite karinaya, kontrol kayıt ünitesi de ölçme odasına sabit olarak monte edilir.
 Suya verilen ses impulsları ile geri dönen ve belirli oranda kuvvetlendirilen impulsların karşılaştırılması kontrol ünitesinde yapılır. Bu karşılaştırma sonucu impulsların t seyir süresi elektronik olarak saptanır. Kontrol ünitesi belli bir ses hızı değerine ayarlanmış olduğundan sonuç, H=t*V/2 ifadesine uygun olarak ya bir ışıklı göstergeye aktarılır, ya da mekanik enerjiye dönüştürülerek kayıt ünitesinde bulunan çizici bir uca iletilir. Çizici uç, kontrol ünitesinin elektriksel uyarılarına göre özel kayıt kağıdı üzerine belirli bir ölçekte derinlikleri işaretler. Kayıt kağıdı belirli bir hızda hareket ettirilebildiğinden, ünitelerin sürekli çalıştırılması ve hidrografi taşıtının hareketli olması durumunda, sualtı tabanının sürekli bir profili (grafiği) elde edilir. Hidrografi gemilerinde genellikle gönderici - alıcı ünite karinaya, kontrol kayıt ünitesi de ölçme odasına sabit olarak monte edilir.")
33
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Kayıt Kâğıtları Aletin yapısına göre mm genişliğinde ve özel yapısı olan rulo halinde kayıt kâğıtları kullanılır. Derinlik kayıtları 1946 yılına kadar mürekkepli çizici bir uç ile yapılır, daha sonraları elektrik akımı ile kararan grafit karışımlı özel karbon kâğıtlar kullanılmaya başlanır. Sürekli derinlik işaretlemesine olanak sağlamak için kayıt kâğıdı, iki makara arasında belirli ve bilinen bir hızla hareket eder. Bazı aletlerde bulunan ve eşit zaman aralıklarında kâğıt üzerine boydan boya düşey bir çizgi çizdiren otomatik zaman sayaçları yardımıyla, kâğıdın ilerleme hızı kontrol edilebilir. Akustik iskandil aletlerinde derinlikler sürekli olarak kaydedildiğinden, yatay düzlemdeki konumu ölçülen iskandil noktaları, kayıt ünitesindeki bir düğme yardımıyla kâğıt üzerine düşey bir çizgi ile işaretlenir.

34
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Akustik İskandilin Uygulanması Aletin Yerleştirilmesi Akustik iskandil aletinin gönderici - alıcı ünitesi daima su içinde bulunur. Hidrografi botlarında kullanılan akustik iskandil aletlerinin gönderici ve alıcı üreteçleri genellikle yan yana getirilerek tek bir ünite (transdüser) içinde toplanmıştır. Transdüser, bir askı borusu yardımıyla botun kenarından ya da önünden suya indirilerek m derinliğe düşey konumda yerleştirilir. Kontrol - kayıt ünitesi, botun içinde herhangi bir yere yerleştirilebilir. Hidrografi gemilerinde genellikle sabit konumlu akustik aletler kullanılır ve bunlarda gönderici ve alıcı ses üreteçleri birbirinden ayrı yerlere, özellikle geminin sol ve sağ karinasına sağlam biçimde tesbit edilir. Kontrol - kayıt ünitesi ise ölçme kamarasında bulunur. Ünitelerin birbirleriyle ve enerji kaynağı ile bağlantıları özel kablolar yardımıyla sağlanır.
 içinde toplanmıştır. Transdüser, bir askı borusu yardımıyla botun kenarından ya da önünden suya indirilerek m derinliğe düşey konumda yerleştirilir. Kontrol - kayıt ünitesi, botun içinde herhangi bir yere yerleştirilebilir. Hidrografi gemilerinde genellikle sabit konumlu akustik aletler kullanılır ve bunlarda gönderici ve alıcı ses üreteçleri birbirinden ayrı yerlere, özellikle geminin sol ve sağ karinasına sağlam biçimde tesbit edilir. Kontrol - kayıt ünitesi ise ölçme kamarasında bulunur. Ünitelerin birbirleriyle ve enerji kaynağı ile bağlantıları özel kablolar yardımıyla sağlanır.")
35
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Aletin Kontrolü ve Düzenlenmesi Akustik iskandil aletlerinin genel kontrolü, çoğunlukla derinliği ve içindeki suyun yoğunluğu bilinen havuzlarda yapılır. Bunun dışında, alet her çalışma ortamında kontrol edilir ve gerekirse ortamdaki fiziksel koşullara uygun olarak düzenlenir. Çünkü aletin kalibre edildiği ses hızı ile, çalışılan ortamdaki koşullara uygun ses hızı arasında önemli ayrıcalıklar bulunabilir. Akustik aletlerin arazide kontrol ve düzenlenmesi için iki yöntem kullanılabilir. a) Teorik Yöntem: Akustik iskandil aletleri genellikle belirli bir ses hızı değerine (örneğin 1500 m/s ) kalibre edilmişlerdir. Teorik yöntemde, çalışılan ortamdaki suyun fiziksel verileri saptanarak ortam için geçerli ses hızı bulunur ve alet bu ses hızı değerlerine ayarlanır. Ancak çalışma ortamının her yerinde aynı fiziksel koşullar olamayacağından, bu hız ortamın değişik yerlerinde ölçülen sıcaklık, tuzluluk ve derinlik değerlerine göre bulunmuş ortalama bir ses hızı değeridir. Bu yöntem su ortamının çeşitli yerlerinde sıcaklığın ve tuzluluğun ölçülmesini gerektirdiğinden masraflı ve zaman alıcıdır. Ayrıca her akustik iskandil aletinde ses hızı düzenlemesi olanaklı değildir. Bu tip aletlerle yapılan ölçmelerden elde edilen değerlere hız düzeltmesi uygulanır.
 Teorik Yöntem: Akustik iskandil aletleri genellikle belirli bir ses hızı değerine (örneğin 1500 m/s ) kalibre edilmişlerdir. Teorik yöntemde, çalışılan ortamdaki suyun fiziksel verileri saptanarak ortam için geçerli ses hızı bulunur ve alet bu ses hızı değerlerine ayarlanır. Ancak çalışma ortamının her yerinde aynı fiziksel koşullar olamayacağından, bu hız ortamın değişik yerlerinde ölçülen sıcaklık, tuzluluk ve derinlik değerlerine göre bulunmuş ortalama bir ses hızı değeridir. Bu yöntem su ortamının çeşitli yerlerinde sıcaklığın ve tuzluluğun ölçülmesini gerektirdiğinden masraflı ve zaman alıcıdır. Ayrıca her akustik iskandil aletinde ses hızı düzenlemesi olanaklı değildir. Bu tip aletlerle yapılan ölçmelerden elde edilen değerlere hız düzeltmesi uygulanır.")
36
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Pratik Yöntem: Akustik aletler, ip ya da tel iskandil ile kontrol edilir. Bunun için ip veya tel ucuna bağlanmış yatay konumlu metal bir plakadan yararlanılır ya da sualtı tabanının düz olduğu tahmin edilen yerlerde kontrol ölçmeleri yapılır. Gönderici - alıcı ünitenin tam altına 5,10,15,.. m gibi bilinen derinliklere indirilen metal plakanın derinliği, bir kez de aletle ölçülerek aynı değerler okunacak biçimde aletin kayıt ünitesi düzenlenir. Pratik yöntemden doğru sonuç alınabilmesi için karşılaştırma ölçmelerinin bölgeyi temsil edecek birkaç noktada yapılması ve bu noktalarda su akıntısının olmaması gerekir. Kontrol, sualtı tabanının düz olduğu bilinen yerlerde de benzer şekilde yapılır.

37
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

38
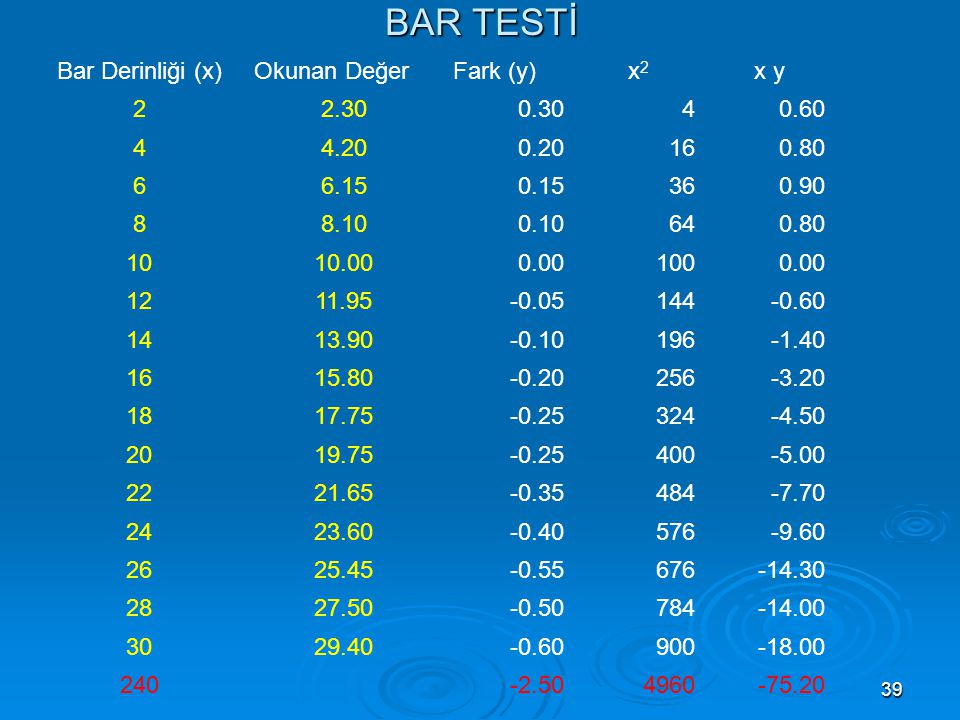
BAR TESTİ Akustik iskandil aleti 1510 m/s ses hızına ayarlı iken 30 m derinliğe kadar her 2 metrede bir bar testi okumaları yapılıyor. Aşağıdaki verilere göre indeks ve ses hızı hatalarını bulunuz ve bu hatalara göre ölçümlerden sonra verilerden çıkartılması gereken değeri; bar testinin hemen sonrasında sisteme girilmesi gerekli yeni ses hızı değerini hesaplayınız.

39
BAR TESTİ Bar Derinliği (x) Okunan Değer Fark (y) x2 x y 2 2.30 0.30 4
0.60 4.20 0.20 16 0.80 6 6.15 0.15 36 0.90 8 8.10 0.10 64 10 10.00 0.00 100 12 11.95 -0.05 144 -0.60 14 13.90 -0.10 196 -1.40 15.80 -0.20 256 -3.20 18 17.75 -0.25 324 -4.50 20 19.75 400 -5.00 22 21.65 -0.35 484 -7.70 24 23.60 -0.40 576 -9.60 26 25.45 -0.55 676 -14.30 28 27.50 -0.50 784 -14.00 30 29.40 900 -18.00 240 -2.50 4960 -75.20
40
BAR TESTİ

41
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Akustik Derinlik Ölçümüne Uygulanacak Düzeltmeler Akustik iskandil aletinin ses üretecinden çıkan ses impulsları yaklaşık olarak koni biçiminde hacimsel bir yüzey içinde sualtı tabanına doğru yayılırlar. Sualtı tabanından yansıyarak alıcı durumundaki üniteye ulaşan impulslardan en erken gelenler, başka bir deyişle en kısa yolu kateden impulslar kayıt kâğıdı üzerinde ilk derinlik çizimine ve daha geç dönen impulslar ise çizginin kalınlaşmasına ve aşağı doğru sarkmasına neden olurlar. Bu nedenle kayıt kâğıdı üzerindeki derinlik işareti ve dolayısıyla sualtı grafiği (profili) ince bir çizgi halinde oluşmaz. Derinlik okuması özel durumlar dışında, daima grafiğin üst kenarından yapılır. Sualtı tabanının düz veya engebeli olmasına göre derinlik ölçülerinin değerlendirilmesi farklıdır.
 ince bir çizgi halinde oluşmaz. Derinlik okuması özel durumlar dışında, daima grafiğin üst kenarından yapılır. Sualtı tabanının düz veya engebeli olmasına göre derinlik ölçülerinin değerlendirilmesi farklıdır.")
42
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
1. Sualtı Tabanı Düz Kayıt kâğıdından okunan derinlik, eşitliğine uygundur. H' değeri, ses konisi ekseninin düşey konumda olduğu kabulüyle, gönderici - alıcı ünitenin alt yüzeyinden sualtı tabanına kadar olan düşey uzaklıktır. İskandil yapılan noktadaki su derinliğini bulabilmek için, gönderici - alıcı ünitenin su içindeki derinliğini eklemek gerekir. Bu durumda derinlik; H=H' + a olur. Uygulamada hesap işlemini azaltmak amacıyla, ölçmeye başlamadan önce kayıt kâğıdının sıfır çizgisi "a" değeri kadar ötelenmek suretiyle bütün derinliklere otomatik olarak eklenir.

43
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
2. Sualtı Tabanı Eğimli Sualtı tabanı eğimli ise, en kısa yolu kateden impulslar şekilde görüldüğü gibi eğimin üst kısmına isabet eden ses konisinin kenar impulsları olacaktır. Bu durumda kayıt kâğıdındaki grafiğin üst kenarında okunan geçici derinlik; dır. İskandil yapılan noktadaki su derinliğini bulmak için a değerinin ve dHe eğim düzeltmesinin dikkate alınması gerekir. Bu durumda kesin derinlik; H=H" + a + dHe eşitliği ile hesaplanır.

44
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Transdüserlerin karakteristikleri bilindiğinden ses konisinin tepe açısı α bellidir ya da hesaplanabilir. Ses konisi içindeki sualtı tabanının eğimi β sabit kabul edilerek dHe eğim düzeltmesi için, şekildeki BB"A' üçgeninden, dHe=BB" tan β -B'B" yazılabilir. Ayrıca B'B" = H" - AB" olduğundan, ABB" üçgeninde, yazılabilir ve bu değerler yukarıda yerlerine konulursa,

45
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

46
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Akustik iskandilde eğim düzeltmesinin alınmaması, özellikle eğimli sualtı tabanındaki ölçmeler için büyük bir hata kaynağı olur. Sualtı tabanının eğimi, kayıt kağıdı üzerindeki profilden belirli bir yaklaşıklıkla saptanabildiğinden, eğim düzeltmesi hesabı kesin sonuç vermez. Ses dalgalarının yaklaşık koni şeklinde hacimsel bir yüzey içinde yayıldığı için, özellikle engebeli sualtı tabanları için kayıt kağıdı üzerindeki profil (eko grafiği) botun ilerleme doğrultusundaki düşey profili temsil etmez. Bu nedenle "dHe" eğim düzeltmesi değerini küçültmek ve ihmal edilebilir bir sınıra yaklaştırmak için, yüksek frekanslı yani ses konisinin tepe açısı 2o den küçük aletler geliştirilmiştir. Ayrıca yüksek frekansların neden olduğu sakıncaları ortadan kaldırmak ve eko grafiklerinin daha kolay yorumlanmasına olanak sağlamak vb. amaçlar için, aynı anda biri alçak frekanslı diğeri yüksek frekanslı ses gönderen modern akustik aletler geliştirilmiştir.
 botun ilerleme doğrultusundaki düşey profili temsil etmez. Bu nedenle dHe eğim düzeltmesi değerini küçültmek ve ihmal edilebilir bir sınıra yaklaştırmak için, yüksek frekanslı yani ses konisinin tepe açısı 2o den küçük aletler geliştirilmiştir. Ayrıca yüksek frekansların neden olduğu sakıncaları ortadan kaldırmak ve eko grafiklerinin daha kolay yorumlanmasına olanak sağlamak vb. amaçlar için, aynı anda biri alçak frekanslı diğeri yüksek frekanslı ses gönderen modern akustik aletler geliştirilmiştir.")
47
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Aynı Anda İki Değişik Frekanslı Ses İle İskandil Tek frekanslı akustik iskandil aletleri ile yapılan derinlik ölçmelerinde ses konisinin tepe açısı belirli bir sınıra kadar küçültülebildiğinden, özellikle eğimli sualtı tabanları için ölçmelere eğim düzeltmesi uygulansa bile, yaklaşık bir sonuç elde ediliyordu. Eğim düzeltmesi hesabını ortadan kaldırmak amacıyla, aynı anda iki değişik frekansla ölçme yapan çift transdüserli akustik aletler geliştirilmiştir. Trandüserlerden biri, ses konisinin tepe açısı çok küçük (α/2<3o) olan yüksek frekanslı ses dalgaları, diğeri ise (α /2>30o) olan alçak frekanslı ses dalgaları göndermekte ve her iki ünite aynı bir kontrol - kayıt ünitesine bağlanmaktadır.
 olan yüksek frekanslı ses dalgaları, diğeri ise (α /2>30o) olan alçak frekanslı ses dalgaları göndermekte ve her iki ünite aynı bir kontrol - kayıt ünitesine bağlanmaktadır.")
48
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Bu düzende yapılmış bir akustik iskandil aleti çalıştırıldığında bir iskandil noktası için kayıt kağıdı üzerinde ayrı iki derinlik işareti görülür. Eğer hidrografi botu hareket halinde ise, eğimli sualtı tabanı için kâğıt üzerinde alt alta iki zemin profili oluşur. Yüksek frekanslı (küçük tepe açılı) ses dalgalarının oluşturduğu profil çizgisi dar ve koyu tonda, alçak frekanslı ses dalgalarınınki ise açık tonda geniş bir profil bandı biçiminde oluşur. Aşağıdaki şekilde görüldüğü gibi profil bandlarının üst sınırları, teorik olarak ses konilerine ait en kısa yolu kateden impulsların neden olduğu çizimlerdir yani H1" ve H2" derinlikleridir. İskandil yapılan noktadaki H' derinliği, şekildeki geometrik bağıntılardan
 ses dalgalarının oluşturduğu profil çizgisi dar ve koyu tonda, alçak frekanslı ses dalgalarınınki ise açık tonda geniş bir profil bandı biçiminde oluşur. Aşağıdaki şekilde görüldüğü gibi profil bandlarının üst sınırları, teorik olarak ses konilerine ait en kısa yolu kateden impulsların neden olduğu çizimlerdir yani H1 ve H2 derinlikleridir. İskandil yapılan noktadaki H derinliği, şekildeki geometrik bağıntılardan.")
49
yazılabilir. Burada, t1 : Açık tondaki grafiğin üst kenarından okunan derinlik, t2 : Koyu tondaki grafiğin üst kenarından okunan derinlik, 1 : Alçak frekanslı transdüserin karakteristiği (tepe açısı), 2 : Yüksek frekanslı transdüserin tepe açısıdır.
, 2 : Yüksek frekanslı transdüserin tepe açısıdır.")
50
Akustik İskandilde Hata Kaynakları
Su Ortamından Kaynaklanan Hatalar a) Hız Hatası Akustik iskandil aletlerinin kontrol - kayıt ünitesi genellikle belirli bir ses hızı (V0 ) değerine ayarlandığından, çalışılan ortamdaki fiziksel koşulların gerektirdiği ses hızının V0 değerinden farklı olması halinde, kayıt kâğıdından okunan derinlikler dHv kadar hatalı olur. Aletin ayarlanmış olduğu V0 ses hızına göre ölçülmüş geçici derinlik H0' ile gösterilirse;
 Hız Hatası. Akustik iskandil aletlerinin kontrol - kayıt ünitesi genellikle belirli bir ses hızı (V0 ) değerine ayarlandığından, çalışılan ortamdaki fiziksel koşulların gerektirdiği ses hızının V0 değerinden farklı olması halinde, kayıt kâğıdından okunan derinlikler dHv kadar hatalı olur. Aletin ayarlanmış olduğu V0 ses hızına göre ölçülmüş geçici derinlik H0 ile gösterilirse;")
51
Akustik İskandilde Hata Kaynakları
b) Su Seviyesindeki Düzensiz Değişmeler Su seviyesindeki düzenli değişmeler ile gel - git etkisinden kaynaklanan değişmeler, mareograf ölçüleri ile saptanabileceğinden, burada dalgaların neden olduğu düzensiz seviye değişmeleri ve yalpa etkileri söz konusudur. Su seviyesindeki düzensiz değişmelerin etkisi, yalpa etkileri yanında ihmal edilebilir. Hidrografi taşıtının dalgalar nedeniyle öne - arkaya veya sağa - sola yalpa yapması, sabit gönderici - alıcı ünitelerde ses konisi ekseninin düşeyliğini etkileyeceğinden derinlik ölçmelerinde yanlışlık derecesine ulaşan kaba hatalar oluşturur.
 Su Seviyesindeki Düzensiz Değişmeler. Su seviyesindeki düzenli değişmeler ile gel - git etkisinden kaynaklanan değişmeler, mareograf ölçüleri ile saptanabileceğinden, burada dalgaların neden olduğu düzensiz seviye değişmeleri ve yalpa etkileri söz konusudur. Su seviyesindeki düzensiz değişmelerin etkisi, yalpa etkileri yanında ihmal edilebilir. Hidrografi taşıtının dalgalar nedeniyle öne - arkaya veya sağa - sola yalpa yapması, sabit gönderici - alıcı ünitelerde ses konisi ekseninin düşeyliğini etkileyeceğinden derinlik ölçmelerinde yanlışlık derecesine ulaşan kaba hatalar oluşturur.")
52
Akustik İskandilde Hata Kaynakları
Yalpaların düzensiz olması nedeniyle hatanın miktarını saptamak mümkün değildir. Bu nedenle yalpa etkisini dengeleyerek ses konisi ekseninin düşeyliğini sağlayan transdüserler kullanılmalıdır. Aksi takdirde su yüzeyinin dalgalı olduğu günlerde ölçüm yapılmasından kaçınılmalıdır.

53
Akustik İskandilde Hata Kaynakları
Aletsel Hatalar Akustik iskandil aletlerinin ünitelerinin her birinin yeterli ve doğru çalışması zorunludur. Örneğin, enerji ünitesinin yeterli çalışmaması halinde diğer üniteler doğru çalışmayacağından ölçmelerde aletsel hatalar oluşur. Bu nedenle akustik aletler için gereksinilen enerjinin maksimum ve minimum sınırları saptanmıştır. Aletsel hataların önemlileri şunlardır: a) Seyir Süresi Hatası Ses impulslarının sualtı tabanına gidiş-dönüş (seyir) süresi "t", elektronik olarak ve aletin inceliğine göre ± saniye doğrulukla saptanır. Bunun derinlik ölçmelerine etkisi aşağıdaki eşitlikle belirlenir.
 Seyir Süresi Hatası. Ses impulslarının sualtı tabanına gidiş-dönüş (seyir) süresi t , elektronik olarak ve aletin inceliğine göre ± saniye doğrulukla saptanır. Bunun derinlik ölçmelerine etkisi aşağıdaki eşitlikle belirlenir.")
54
Akustik İskandilde Hata Kaynakları
b) Ayar Hatası Aletin normal çalışma düzeninin bozulması ya da yetersiz düzenlemeler ayar hatası olarak adlandırılır. Su yoğunluğu ve derinliği bilinen bir yerde (genellikle havuzlarda) yapılan ölçmelerle hata miktarı belirlenir. Gerçek derinlik ile kayıt kağıdından okunan derinlik arasındaki fark, derinlik okuma inceliğinden küçük ise alete ya da ölçülere düzeltme uygulanmaz.
 Ayar Hatası. Aletin normal çalışma düzeninin bozulması ya da yetersiz düzenlemeler ayar hatası olarak adlandırılır. Su yoğunluğu ve derinliği bilinen bir yerde (genellikle havuzlarda) yapılan ölçmelerle hata miktarı belirlenir. Gerçek derinlik ile kayıt kağıdından okunan derinlik arasındaki fark, derinlik okuma inceliğinden küçük ise alete ya da ölçülere düzeltme uygulanmaz.")
55
Akustik İskandilde Hata Kaynakları
Kişisel Hatalar Akustik iskandil aletleriyle otomatik ve sürekli ölçüm yapılmasına karşın, ölçmeye başlamadan önce aletin kontrolü ve düzenlenmesi, çalışma sırasında derinlik basamağının değiştirilmesi, konum ölçümü yapılan iskandil noktalarının işaretlendirilmesi ve numaralandırılması gibi işler için alet operatörüne ihtiyaç duyulur. Operatörün yapacağı hatalar ile kayıt kâğıdından derinlik okuması yapan kişinin hataları, kişisel hataları oluşturur. Bu hataların bazıları şunlardır: a) Aletin Hatalı Düzenlenmesi Kontrol ünitesinde hatalı hız ayarı ve kayıt kâğıdının sıfır ayarının hatalı yapılması kişisel düzenleme hatalarıdır. Bunlar dikkatsizlikten kaynaklanan hatalardır ve ölçüleri sistematik olarak etkiler. Çalışma sırasında aletin belirli zamanlarda kontrol edilmesi ile hatanın varlığı ve miktarı belirlenebilir.
 Aletin Hatalı Düzenlenmesi. Kontrol ünitesinde hatalı hız ayarı ve kayıt kâğıdının sıfır ayarının hatalı yapılması kişisel düzenleme hatalarıdır. Bunlar dikkatsizlikten kaynaklanan hatalardır ve ölçüleri sistematik olarak etkiler. Çalışma sırasında aletin belirli zamanlarda kontrol edilmesi ile hatanın varlığı ve miktarı belirlenebilir.")
56
Akustik İskandilde Hata Kaynakları
b) Transdüser Derinliğini Ölçme Hatası Transdüser su yüzeyinden belirli bir derinliğe indirilir. Alet daima bu ünitenin altında kalan derinliği ölçtüğünden, su yüzeyine göre derinliği belirlemek için, transdüser derinliğinin de ölçülerek eklenmesi gerekir. Normal koşullarda transdüser derinlik hatasının ±2 cm den küçük olduğu kabul edilir. c) Derinlik Okuma Hatası Akustik iskandilde derinlik işaretleyen aletler (ekograflar) kullanıldığından, derinlikler kayıt kâğıdından okunur. Derinlik okumasında kişiye bağlı olarak düzenli ve düzensiz hatalar olabilir. Kayıt kâğıdı üzerindeki taban grafiği net ve ince bir çizgi olmadığından okuma inceliği ortalama, ±0.5mm olarak alınır. Kaba okuma hataları genellikle, yanlış okuma ve yalancı eko dalgası olarak ikiye ayrılır. Yanlış okuma genellikle dikkatsizliğin bir sonucudur. Yalancı eko yanılgısı ise, okuyucunun yorumlama bilgisi yetersizliği nedeniyle gerçek tabana ait olmayan çizgiyi okumasıdır.
 Transdüser Derinliğini Ölçme Hatası. Transdüser su yüzeyinden belirli bir derinliğe indirilir. Alet daima bu ünitenin altında kalan derinliği ölçtüğünden, su yüzeyine göre derinliği belirlemek için, transdüser derinliğinin de ölçülerek eklenmesi gerekir. Normal koşullarda transdüser derinlik hatasının ±2 cm den küçük olduğu kabul edilir. c) Derinlik Okuma Hatası. Akustik iskandilde derinlik işaretleyen aletler (ekograflar) kullanıldığından, derinlikler kayıt kâğıdından okunur. Derinlik okumasında kişiye bağlı olarak düzenli ve düzensiz hatalar olabilir. Kayıt kâğıdı üzerindeki taban grafiği net ve ince bir çizgi olmadığından okuma inceliği ortalama, ±0.5mm olarak alınır. Kaba okuma hataları genellikle, yanlış okuma ve yalancı eko dalgası olarak ikiye ayrılır. Yanlış okuma genellikle dikkatsizliğin bir sonucudur. Yalancı eko yanılgısı ise, okuyucunun yorumlama bilgisi yetersizliği nedeniyle gerçek tabana ait olmayan çizgiyi okumasıdır.")
57
Akustik İskandilde Hata Kaynakları
Soru : Bir noktada akustik iskandil yapılıyor. Kontrol kayıt ünitesinde ayarlı olan ses hızı, 1510 m/s, gönderilen sesin hızı 1460 m/s, transdüser derinliği 1.25 m, sesin gönderilmesi ve alınması için geçen süre 0.6 saniye, ses konisinin tepe açısı 10 ve sualtı tabanının eğimi 12.4 olduğuna göre iskandil derinliğini bulunuz.

58
Akustik İskandilde Hata Kaynakları

59
Akustik İskandilde İncelik
Akustik iskandil aleti ile ölçülen H' derinliğine değişik düzeltmeler uygulandıktan sonra Hd düzeltilmiş derinlik değeri elde edilir. Akustik yöntemle elde edilen Hd derinliği ve inceliği; eşitliği ile ifade edilir. Burada; mH' : Derinlik çözümleme inceliği ma : Transdüser derinliğinin ölçülme inceliği mHv : Hız düzeltmesi inceliği mHe : Eğim düzeltmesi inceliği mHa : Aletin ayar düzeltmesi inceliği

60
Akustik İskandilde İncelik
Akustik aletlerin ayar düzeltmesi mHa laboratuvar dışında genellikle ip veya tel iskandili ile yapıldığından mHa < mok kabul edilir. Eğim düzeltmesi inceliği, öncelikle sualtı taban eğimine ve eğim değerinin inceliğine bağlıdır. Düz sualtı tabanları için mHe= 0 kabul edilir. Yöntemin genel inceliği; Klasik aletlerle yapılacak ölçmeler için:100 metrede ±1 m (±%1 H) Hassas aletlerle yapılacak ölçmeler için: ± % ( ) H metre olarak kabul edilir.
 Hassas aletlerle yapılacak ölçmeler için: ± % ( ) H metre. olarak kabul edilir.")
61
Lidar İskandil Lidar (Laser) İskandil
Su yüzeyindeki bir ışık kaynağından düşey doğrultuda gönderilen ışık ışınları sualtı tabanından yansıyarak geri dönerler. Işık dalgalarının su içindeki yayılma hızı C', bilindiğinden ışığın t seyir süresi ölçülerek su derinliği; bağıntısından bulunur. Işık dalgalarının su içinde dağılma ve yutulmasının fazla olması nedeniyle, derinlik ölçmelerinde dalga boyları mm mm arasında olan laser ışınları kullanılır. Laser ışınları ile derinlik ölçme yöntemine lidar iskandili denir.

62
Lidar İskandil Lidar ile iskandil denemeleri ilk kez 1969 yılında Ontario gölünde uçaktan yapılmış ve olumlu sonuçlar alınmıştır. Ancak uçaktan yapılan ölçmelerde su yüzeyinin ışık ışınları üzerinde olumsuz etkisi görüldüğünden, ölçmelerin bottan yapılması zorunlu olmuştur. Lidar iskandilinin inceliği, öncelikle ışığın su içindeki yayılma hızına, seyir süresinin belirlenmesi inceliğine bağlıdır. Ayrıca sualtı tabanından dönen ışık ve alıcının çözümleme yeteneği inceliği etkileyen diğer faktörlerdir. Laser ışınlarının 30" - 30' gibi çok dar açı içinde demetlenebilmesi ve ışık yoğunluğunun çok fazla olması nedeniyle sualtı tabanının eğimi ile ilgili eğim düzeltmesi ihmal edilebilir.

63
Derinlik Ölçülerinin İndirgenmesi
Derinlik ölçüleri, yöntemle ilgili düzeltmeler getirildikten sonra ortak bir yüzeye indirgenir. Bu yüzey, maregraf ölçmeleri ile belirlenen ortalama su seviyesinden geçen bir yüzeydir. Derinlik ölçümü süresince maregraflar yardımıyla, su seviyesindeki değişimler izlendiğinden ortalama su seviyesinin kotu bellidir. Buna göre bir derinlik ölçüsün referans yüzeyine indirgenmesi; Hi = Hsk - Hd bağıntısı ile yapılır.Burada, Hd = Düzeltilmiş derinlik değeri Hsk= İskandilin yapıldığı andaki su seviyesi kotu, anlamındadır. İndirgenmiş derinlik değerleri, sualtı tabanının yüksekliğini ifade eder.

64
İskandil Yoğunluğu İskandil Yoğunluğu
Haritanın yapılış amacına ve sualtı tabanın topografik yapısına bağlı olarak iskandil yoğunluğu, noktalar arası uzaklık harita üzerinde cm olacak şekilde belirlenir. Kıyıdan açık denizlerde ya da sualtı tabanının düz olduğu tahmin edilen sularda standart nokta yoğunluğu azaltılabilir. Bu koşullarda özellikle akustik iskandilde, iskandil doğrultuları arasındaki uzaklık cm, doğrultular üzerinde konumu ölçülecek noktalar arası uzaklık ise cm'ye kadar çıkarılabilir. Ancak gerekli görülen yerler için veya derinlik (izobat) eğrileri çiziminin inceliğini arttırmak amacıyla, kayıt kâğıdı üzerinde bilinen noktalar arasında enterpolesyon yapmak suretiyle yeni noktalar belirlenebilir. İp ve tel iskandilde bu olanaklar olmadığından standart nokta sıklığına uyulur.
 eğrileri çiziminin inceliğini arttırmak amacıyla, kayıt kâğıdı üzerinde bilinen noktalar arasında enterpolesyon yapmak suretiyle yeni noktalar belirlenebilir. İp ve tel iskandilde bu olanaklar olmadığından standart nokta sıklığına uyulur.")
65
İskandil Yoğunluğu Sualtı tabanının yükseklik eğrileri çizildikten sonra, iskandil noktalarının bir kısmı silinerek genelleştirme yapılır. Aşağıdaki çizelgede derinlik ölçme yöntemlerine bağlı olarak küçük ve büyük ölçekli harita çalışmaları için, iskandil doğrultuları ile bu doğrultular üzerindeki iskandil noktalarının ara uzaklığı gösterilmiştir. Sualtı tabanının düz olduğu tahmin edilen bölgeler için çizelgede yazılı olan değerlerin ikincileri alınır. Akustik iskandilde, kayıt kağıdı üzerinden enterpolasyonla yeni noktalar belirlenerek çizelgedeki değerler standart nokta aralıklarına getirilir.

66
İskandil Yoğunluğu İskandil doğrultularının aralıkları
Ö ≥1/ Ö < 1/40.000 Klasik Yöntemler cm cm Akustik Yöntem cm cm Doğrultu üzerinde iskandil aralıkları Ö ≥1/ Ö < 1/40.000 Klasik Yöntemler cm cm Akustik Yöntem cm cm

67
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Transdüser ve Hüzme Şekillendirmesi 1-300 kHz frekans aralığında yer alan basınç dalgaları en çok kullanılanlardır. Titreşimli bir yüzey tarafından oluşturulurlar. Rezonans frekansı, gerekli olan transmisyon frekansı kadardır. Genellikle, titreşimli yüzey bir seramik motora elektrik gücü uygulanmasıyla çalıştırılır ya da elektrik gücü doğrudan yüzeye uygulanır. Ardından deniz suyu etkeniyle ilişki içinde olan titreşim tarafından elektrik gücü ses gücüne çevrilir. Bu sistem transdüserdir. Ses, basınç dalgaları yüzünden titreşime uğrayan bir transdüser, aynı şekilde ses gücünü elektrik gücüne dönüştürecektir. Böylece, transdüser deniz suyu etkeninden ses gücü yayabilir. Tıpkı radarın e-m dalgalarıyla işlediği biçimde o da iletkenin yörüngesindeki bir hedef tarafından yansıtılan ses gücünü alabilir. Verici (yayıcı) görevi yapan transdüserlere projektör, alıcı görevi yapanlara ise hidrofon denilir.
 görevi yapan transdüserlere projektör, alıcı görevi yapanlara ise hidrofon denilir.")
68
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Ölçmelerde kullanılan transdüserler, çeşitli şekillerde ses gücü hüzmeleri üretmek üzere tasarlanmışlardır. Genellikle, enerjiyi yayılma yüzeyine dik bir eksen boyunca yönlendirirler. Belirleyici faktör iletilen frekanstaki dalga boyu ile yüzeyin boyutlarıdır. Uzun ve dar bir yüzey, ortogonal düzlemde uzun boyuta doğru dar bir ışın (hüzme) üretecektir. Daire şeklindeki bir transdüser koni şeklinde hüzme üretir.
 üretecektir. Daire şeklindeki bir transdüser koni şeklinde hüzme üretir.")
69
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

70
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Hüzme genişlemesi ulaşılan yol göstericilik derecesini yani transdüserin ses gücünü toplama (yönlendirme) yeteneğini belirtir. Kabaca dairesel bir transdüserin hüzme genişlemesi = (65 ) / d biçiminde gösterilebilir. Burada; , iletilen ya da alınan frekansın dalga boyu; d, ise yayılma yüzeyinin çapıdır (her ikisi de aynı birimlerle ifade edilmiştir). Dikdörtgen transdüserde ise, = (50 ) / L şeklinde yazılabilir. L, dikkate alınan Hüzme düzlemine dikey olan yayılma yüzeyinin boyutudur.
 yeteneğini belirtir. Kabaca dairesel bir transdüserin hüzme genişlemesi = (65 ) / d biçiminde gösterilebilir. Burada; , iletilen ya da alınan frekansın dalga boyu; d, ise yayılma yüzeyinin çapıdır (her ikisi de aynı birimlerle ifade edilmiştir). Dikdörtgen transdüserde ise, = (50 ) / L şeklinde yazılabilir. L, dikkate alınan Hüzme düzlemine dikey olan yayılma yüzeyinin boyutudur.")
71
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Ses dalgalarının deniz suyundaki ortalama yayılma hızı, 1500 m /s dir. 30 kHz lik bir sesin akustik iletimi (1500 / ) m ya da 50 mm kadar bir dalga boyuna sahip olur. 30 lik bir konik hüzme genişlemesi için (650.05 / 30) m ya da 110 mm çaplı bir transdüser gerekir. 1m0.1 m boyutlarında dikdörtgen bir transdüserin hüzme genişlemesi; bir düzlemde (50 0.05/1), bir diğerinde ise (500.05/ 0.1) olacaktır. Ya da 2.5 25 . Ekosander (echo-sounder) sisteminin temel bileşenleri: transmisyon birimi (transceiver), alıcı / verici birimi (transducer), bir alıcı amplifikatörü ve sinyal işlemcisi ile kayıtçı veya gösterim (display) birimlerinden oluşmaktadır
 m ya da 50 mm kadar bir dalga boyuna sahip olur. 30 lik bir konik hüzme genişlemesi için (650.05 / 30) m ya da 110 mm çaplı bir transdüser gerekir. 1m0.1 m boyutlarında dikdörtgen bir transdüserin hüzme genişlemesi; bir düzlemde (50 0.05/1), bir diğerinde ise (500.05/ 0.1) olacaktır. Ya da 2.5 25 . Ekosander (echo-sounder) sisteminin temel bileşenleri: transmisyon birimi (transceiver), alıcı / verici birimi (transducer), bir alıcı amplifikatörü ve sinyal işlemcisi ile kayıtçı veya gösterim (display) birimlerinden oluşmaktadır.")
72
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

73
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Frekans İletimin dalga boyunun ve frekansının çok önemli olduğu açıktır. Doğru ölçüm için yüksek çözümleme ve dar ışın gereklidir. Ses dalgası yayılımının bir başka özelliği de frekans ne kadar yüksek olursa dalga boyunun o kadar kısa ve hüzme genişliğinin de o kadar dar olmasıdır. Boyutları 1m 0.1 m olan bir transdüseri ele alalım. Eğer frekans 30 kHz den 300 kHz ye çıkarılırsa, dalga boyu (1500 / ) m ya da 5 mm olur. Hüzme genişliği ise 0.25 2.5 ye iner. Eğer derin su sondajı için uzun menzilli bir echo-soundere (ekosandere) ihtiyaç varsa, gerekli hüzme genişliği 5 olarak belirlenebilir. Ancak bu durumda transdüserin çapı 650 mm, 2 lik hüzme için ise 1.6 m olmalıdır. Nikel alaşımlı saçtan ya da benzeri şekilde imal edilen böyle bir transdüser ağır, çok yer kaplayan ve pahalı bir şey olacaktır. Buna çare olarak hüzme çözümlemesinden özveride bulunulmuş ve hüzme genişliği olarak, örneğin, 30 kabul edilmiştir.
 m ya da 5 mm olur. Hüzme genişliği ise 0.25 2.5 ye iner. Eğer derin su sondajı için uzun menzilli bir echo-soundere (ekosandere) ihtiyaç varsa, gerekli hüzme genişliği 5 olarak belirlenebilir. Ancak bu durumda transdüserin çapı 650 mm, 2 lik hüzme için ise 1.6 m olmalıdır. Nikel alaşımlı saçtan ya da benzeri şekilde imal edilen böyle bir transdüser ağır, çok yer kaplayan ve pahalı bir şey olacaktır. Buna çare olarak hüzme çözümlemesinden özveride bulunulmuş ve hüzme genişliği olarak, örneğin, 30 kabul edilmiştir.")
74
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Akustik Transmisyon (Akustik İletim) Basit ekosanderlarda puls, transdüsere ani elektriksel deşarj uygulanarak sağlanır. Böylece büzülmesi ya da fiziksel değişime uğraması sağlanır. Transdüser diyaframı, orijinal duruma döndüğünde tekrar doğal frekansıyla titreşim yapar. Akustik gücün son puls titreşimler azaldıkça süratle peşinden gelen başlangıç yüksek genliğine sahiptir. Daha gelişmiş aletlerde özellikle de derin su ekosanderlarında ve kıyı-araştırma su üstü radarlarında puls sürekli salınımlı (titreşimli) bir kaynaktan elektrik gücü girmesiyle oluşur. Bu salınım kristal kontrollüdür. Son frekans oldukça nettir. Çıkan pulsun şekli ise neredeyse kare bir zarf içindedir.
 Basit ekosanderlarda puls, transdüsere ani elektriksel deşarj uygulanarak sağlanır. Böylece büzülmesi ya da fiziksel değişime uğraması sağlanır. Transdüser diyaframı, orijinal duruma döndüğünde tekrar doğal frekansıyla titreşim yapar. Akustik gücün son puls titreşimler azaldıkça süratle peşinden gelen başlangıç yüksek genliğine sahiptir. Daha gelişmiş aletlerde özellikle de derin su ekosanderlarında ve kıyı-araştırma su üstü radarlarında puls sürekli salınımlı (titreşimli) bir kaynaktan elektrik gücü girmesiyle oluşur. Bu salınım kristal kontrollüdür. Son frekans oldukça nettir. Çıkan pulsun şekli ise neredeyse kare bir zarf içindedir.")
75
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Çözümleme Akustik bir aletin çözümlemesi ya aletin ölçme inceliği ya da algılama yeteneğini (detection capabilities) ifade eder ve bunlar bazı faktörlerce belirlenir. Bunlar arasında: 1. Puls süresi ve uzunluğu, 2. Akustik dalga yönünün hedefe varış açısı, 3. Kayıt ortamının hassasiyeti ve çözümlemesi, 4. Hedefin doğası (fiziksel özellikleri ve büyüklüğü), 5. Transmisyonun hüzme genişliği.
 ifade eder ve bunlar bazı faktörlerce belirlenir. Bunlar arasında: 1. Puls süresi ve uzunluğu, 2. Akustik dalga yönünün hedefe varış açısı, 3. Kayıt ortamının hassasiyeti ve çözümlemesi, 4. Hedefin doğası (fiziksel özellikleri ve büyüklüğü), 5. Transmisyonun hüzme genişliği.")
76
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Bir ayırma pulsunun frekansı, yayılma hızı ve puls süresince belirlenen sınırlı bir uzunluğu vardır. Örneğin, 15 kHz lik bir frekansta 1 ms süren bir puls, 15 devirlik bir “demet”ten oluşur. Eğer ses hızı, 1500 m/s ise, dalga boyu 0.1 m olur ve 15 devir 1.5 m lik bir puls uzunluğu yaratır. Eğer puls uzunluğunun yarısı kadar uzaklıkta yer alan iki nesne akustik hüzme yolunda bulunuyorsa, yansıtırlar ve tek bir hedef olarak kaydedilirler. Eğer daha da uzakta iseler, iki ayrı eko olarak kaydedilirler. Çözümleme ise 0.75 m ya da puls uzunluğunun yarısı olarak belirtilir. Eğer hüzme yolu hedefe normal gelmiyorsa, etkili puls uzunluğu daha da büyük olur ve çözümleme inceliği azaltılır. Mümkün olan en az puls uzunluğunun da doğal olarak sınırları vardır. Her koşulda gösterim ortası alıcı devresince alınan çeşitli yansımış ekoları tahlil edemeyebilir. Elektrikli mil normalde elektro kimyasal ya da karbonlu kağıdına kaydedilir. Yazıcı iğne, pulsun uzunluğundan çok daha büyük bir eko gösterebilir. Manyetik bant gibi kayıt araçlarında böyle kusurlar görülmez. Fakat yine de elde edilen verilerin tam bir reel zaman tarifini veremezler.

77
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

78
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Hassasiyet (İncelik) Deniz tabanındaki ölçmelerde, önemli tereddütler ve hata kaynakları bulunmaktadır. Ses hızını etkileyen faktörler, hüzmenin davranışını da etkiler. Hız, her derinlikte nispeten basit araçlarla ölçülebilir. Ancak, bu nokta gözlemleri, transdüser ve hedef arasındaki bütün yolun ortalama hızını bulma ihtiyacını tatmin etmez. Sözü edilen bu yol, bir sondaj hattı boyunca sürekli olarak çeşitlilik gösteren bir mesafedir. Ses hızı, sıcaklık, tuzluluk ve yoğunluğun bir fonksiyonudur. Bu üç özellik de günlük, mevsimlik ve gel-git akıntısı, yağış gibi tesadüfi ya da periyodik etkilere bağlı olarak değişir. Üçü de derinliğe göre çeşitlilik gösterir ki bu zaten en sık aralıkla ölçmek zorunda kalınan parametredir.
 Deniz tabanındaki ölçmelerde, önemli tereddütler ve hata kaynakları bulunmaktadır. Ses hızını etkileyen faktörler, hüzmenin davranışını da etkiler. Hız, her derinlikte nispeten basit araçlarla ölçülebilir. Ancak, bu nokta gözlemleri, transdüser ve hedef arasındaki bütün yolun ortalama hızını bulma ihtiyacını tatmin etmez. Sözü edilen bu yol, bir sondaj hattı boyunca sürekli olarak çeşitlilik gösteren bir mesafedir. Ses hızı, sıcaklık, tuzluluk ve yoğunluğun bir fonksiyonudur. Bu üç özellik de günlük, mevsimlik ve gel-git akıntısı, yağış gibi tesadüfi ya da periyodik etkilere bağlı olarak değişir. Üçü de derinliğe göre çeşitlilik gösterir ki bu zaten en sık aralıkla ölçmek zorunda kalınan parametredir.")
79
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
Hassas derinlik kaydediciler ve ekosanderlar dışındaki pek çok su üstü radar gereçleri, dikkatle bağlanmış motor hızını içerirler. Genellikle bu, derinlik/menzil ölçeğini 1500 m/s lik bir ses hızıyla eşitleyen bir motor hızıdır. Kalibrasyon normal olarak pek mümkün değildir. Dünyanın tüm deniz alanları için bölgesel ses hızı tahminlerinin olduğu çizelgeler kullanılır. Düzeltme işlemi sıkıcıdır ve genellikle de pek güvenilir değildir. Bunun sebebi de ısının çok düşük, yoğunluğun ve ses hızı formüllerinin dayandığı tuzluluk gözlemleridir.

80
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
En iyi yöntem, gerekli tüm detektörleri (sensörleri) içeren sondaj, su sütunu boyunca alçalttıkça, derinliğe karşı doğrudan ve sürekli bir sıcaklık, tuzluluk ve ses hızı okuması yapan bir alet kullanmaktır. Uygun bir bilgisayar programı, okumaları tamamlayıp ortalamalarını almak suretiyle ortalama ses” hızını saptayabilir. Bu işlem, sondajı alçaltıp yükseltmek kadar bir zaman alır. Bu da kıta sahanlığı derinliklerinde 20 dakikalık bir iştir. Ancak araç gerecin masrafı, EPF zinciri veya uydu alıcısına eşittir ve genellikle daha az incelikli yöntemler tercih edilir.
 içeren sondaj, su sütunu boyunca alçalttıkça, derinliğe karşı doğrudan ve sürekli bir sıcaklık, tuzluluk ve ses hızı okuması yapan bir alet kullanmaktır. Uygun bir bilgisayar programı, okumaları tamamlayıp ortalamalarını almak suretiyle ortalama ses hızını saptayabilir. Bu işlem, sondajı alçaltıp yükseltmek kadar bir zaman alır. Bu da kıta sahanlığı derinliklerinde 20 dakikalık bir iştir. Ancak araç gerecin masrafı, EPF zinciri veya uydu alıcısına eşittir ve genellikle daha az incelikli yöntemler tercih edilir.")
81
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ
200 metreye kadar ya da o civardaki kıta sahanlığı su derinliklerinde basit bir ses hızı ölçer kullanılır. Su sütunundan aralıklarla elde edilen okumaların çok belirgin bir hata olmaksızın ortalama ses hızını belirlemek üzere aritmetik olarak ortalaması alınır. Bu araç çok pahalı değildir ve şu prensiple işler: Bir transdüser, çok kısa ve kesin olarak belirlenmiş bir geçit uzunluğuna ses pulsu verir. Puls, ilkini alınca ikinci bir puls vermek için ayarlanmış transdüsere geri döner. Böylece puls tekrarı oranı doğrudan ses hızıyla bağlantılı olur. Bu sayede gereken birimlerde (genellikle her saniye için metre) doğrudan okumalar elde edilir.
 doğrudan okumalar elde edilir.")
82
Derinlik Ölçümünde Güncel Teknoloji
Tek hüzmeli klasik akustik iskandillerin yanında uygulamaya konan çok sayıda umut verici diğer teknikler çok hüzmeli sistemler ve yandan taramalı sonarlardır. Çok hüzmeli (Multibeam) echo sounder sistemleri, etkin çözümlemeyi geliştirmek için çoklu paralel hüzmeler üretmektedir. Bu sistemler genellikle su derinliğinin 7 misline kadar bir yanal tarama yapabilmektedirler. Her taramada gemi rotasına dik yönde 64 adet derinlik ölçümü yapılabilmektedir.
 echo sounder sistemleri, etkin çözümlemeyi geliştirmek için çoklu paralel hüzmeler üretmektedir. Bu sistemler genellikle su derinliğinin 7 misline kadar bir yanal tarama yapabilmektedirler. Her taramada gemi rotasına dik yönde 64 adet derinlik ölçümü yapılabilmektedir.")
83
Derinlik Ölçümünde Güncel Teknoloji

84
Derinlik Ölçümünde Güncel Teknoloji

85
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

87
MODERN DERİNLİK ÖLÇME YÖNTEMLERİ

89
Yandan taramalı sonar; deniz altı resimlendirmelerde olağanüstü detaylar üreten ve gemi enkazı, dipteki özelliklerin ortaya çıkarılmasında gerçekçi görüntüler veren ışık yerine ses dalgası kullanan modern bir yöntemdir. Batimetrik haritalandırma aletleriyle yapılan harita solda, Yandan taramalı sonar kullanılarak elde edilen görüntü sağda İki şekil arasındaki en önemli fark; 1. sinde çok önemli özelliklerin kaydedilmesi için yeterli hassasiyetin olmamasıdır. Yandan taramalı sonarlar elde edilen sertlik/yumuşaklık derecesine göre ayrılmış pek çok alan var ama resim üzerinde şeklini belli eden derinlik eğrileri yok.

90
Sol tarafta görülmeyip sağ taraftaki resimde görülen özellikler:
Yandan taramalı resimde özellikler belirgin olarak ortaya çıkmaktadır. Açıkça görülen volkanik kraterler ile küçük volkanik tümsekler gibi bazı detaylar Batimetrik haritada fark edilememektedir. Açık renk veya beyaz renkli olan kısımlar deniz tabanından güçlü olarak dönen akustik sinyalleri ifade etmektedirler. Beyaz çizgilerin anlamı ise sonarın küçük hatalarla geri dönmesi veya yaklaşık düşey,sarp duvarlardır. Volkanik deliklerin orta kısımları hakkında ise tam bir sonuç alınamaz çünkü bu kısımlarda hiçbir akustik sinyal; ses enerjisinin buradan alınamamasından dolayı kraterlerden geri dönmemektedir.

91
Derinlik Ölçümünde Güncel Teknoloji
200 metre derinliğe kadar sularda en fazla 15 cm olan teorik derinlik hatası, algılayıcılardan gelen bilgilerle, sistem içinde ve ölçme anında yapılan düzeltmelerle teorik olarak 2 cm ye kadar indirgenebilir. Son yıllarda derinlik ölçme çalışmalarındaki ölçüm profil aralıklarının sıklık derecesini en ekonomik şekilde belirlemek ve araştırıcının yorumuna gerek kalmadan yalnızca enterpolasyon yöntemiyle derinlik eğrili haritaların çiziminde gerekli olan ölçüm devamlılığını optimum düzeyde sağlamak için, yandan taramalı sonar görüntülerinden yararlanılmaktadır.

92
Derinlik Ölçümünde Güncel Teknoloji
Alışılmış akustik derinlik ölçme yöntemlerinde düşey doğrultuda yayılan akustik ışın demeti kullanılır. Buna karşılık yandan taramalı sonar yönteminde, ana ekseni yatayın biraz altında olan eğik bir akustik ışın demeti kullanılır. Sistem akustik enerji yansımalarını kaydederek, deniz dibinin oldukça geniş planda sürekli bir görüntüsünü verir. Sonar verileri isteğe bağlı olarak çeşitli şekillerde kayıt edilebilirler. Genellikle kalitatif (nitel) yorumlanan ve son zamanlarda kantitatif (nicel) neticeler üretilebilen bu yöntem, deniz tabanı jeolojisi ve jeoteknik araştırmalarda kullanılmaktadır
 yorumlanan ve son zamanlarda kantitatif (nicel) neticeler üretilebilen bu yöntem, deniz tabanı jeolojisi ve jeoteknik araştırmalarda kullanılmaktadır.")
93
Derinlik Ölçümünde Güncel Teknoloji
Nicel derinlik bilgilerinden ziyade yansıma görüntülerini veren yandan taramalı sonarlar, 1 m den daha küçük bir çözümleme ile birkaç yüz metre genişlikteki bantlar halinde taban kaplaması verirler. Son yıllarda derin sular için üretilen sistemler ise daha büyük ve pahalı olup, büyük tonajlı araştırma gemilerinde kullanılmaktadır. Derin sularda daha yüksek çözümleme, transduceri dibe yakın çekerek sağlanabilir. Bu şekilde birkaç metre çözümleme ile 2-5 km genişlikli taramalar yapılabilirse de, gemi hızı saatte 1-2 mil ile sınırlı olduğundan, etüt süresi çok artmaktadır.

94
Derinlik Ölçümünde Güncel Teknoloji
Tekniği yandan taramalı sonarlar gibi olan interferometrik yandan taramalı sonarlarda eko geliş yönünün tespiti için ikinci bir alıcı kullanılmaktadır. Böylece nicel derinlik verileri elde edilebilmektedir. Derin sularda 10 m çözümleme ile 10 km, orta derinlikteki sularda, 0.5 m çözümleme ile 1 km ve 60 m den sığ sularda 0.5 m çözümleme ile 200 m tarama yapılabilmektedir. Tek veya çok kanallı akustik iskandil sistemleri ile birleştirilen yandan taramalı sonar sistemleri çok başarılı olmakta ve klasik sonograflara benzer çıktılar elde edilebilmektedir.

95
Derinlik Ölçümünde Güncel Teknoloji
Sığ sularda sonar hatları, deniz biriminin altında ve en az 50 m yanal menzilli deniz tabanını tarayacak şekilde düzenlenirler. Bununla birlikle deniz tabanındaki herhangi bir cismin sonograf üzerinde görüntü verebilmesi için ardışık en az 5 eko alması gerektiğinden, incelenen cisim ya da yapıların büyüklüğüne göre gemi hızı ve iki ardışık puls arası zamanın doğru ayarlanması gerekir. Sonar görüntülerinin düzeltilebilmesi için kayıtları etkileyen gürültü ve bozulmaların bilinmesi gereklidir. Sonograflarda karakteristik desenler oluşturan başlıca üç ana akustik girişim kaynağı vardır.

96
Derinlik Ölçümünde Güncel Teknoloji
Sürekli girişim deseni : Yandan taramalı sonar ile aynı anda çalışan çeşitli sismik ve akustik aletler mevcutsa, sonograf üzerinde sürekli bir girişim deseni oluşur. Su sütunundaki yoğun asılı maddelerin oluşturduğu girişim : Bu maddeler yeteri kadar yoğun olduğunda sonar ışınları dağılıma uğrar veya deniz tabanına ulaşamadan geri yansır. Sonograflarda bu maddeler koyu görüntüler verirken, akustik ışın alamayan bölgeler beyaz boşluklar gösterir. Balık sürüleri ise aynı şekilde keskin kenarları olan, fakat bu kez dağınık siyah lekecikler oluştururlar. Diğer gemilerin ultrasonik dalgalarının yarattığı girişim : Sık rastlanan bu olay, ayrık bir desen oluşturduğundan diğer girişimlerden kolaylıkla ayrılabilir.

97
Derinlik Ölçümünde Güncel Teknoloji
Deniz tabanı sonar haritası deniz tabanının akustik imajı yani plan görüntüsüdür. Bu harita pixel adıyla bilinen ve tek renkten oluşan doku elemanlarının iki boyutta dizilmesiyle oluşmuştur. İki boyutta dizilmiş bu pixellerin her birinin yoğunluğu değişik olup, o noktadaki hedef noktacığının yansıtma şiddetinin genliğini temsil etmektedir. Sert cisimler ve objeler kayıtlarda koyu, çöküntü alanları ve cisimlerin gölgeleri ise açık renklerde gözlenirler.

98
Derinlik Ölçümünde Güncel Teknoloji
Sonograflardan mozaik haritası üretilirken birçok görüntü bozucu faktörün varlığı görülür. Bu faktörler, alışılagelmiş bir sonograf kaydında önemli geometrik görüntü bozulmalarına ve distorsiyonlara neden olurlar. Işınların eğik gelmesinden dolayı gerçek yanal ölçek doğrusal olmadığından ve deniz biriminin dipten olan yüksekliği değiştiğinden ende (yanal görüntü sıkışması), gemi (çekme) hızı sabit tutulamadığından boyda (görüntü sıkışması ve açısal değişim) ve enerji saçılmasından dolayı yükseklikte (genlik), kısaca her üç boyutta değişik distorsiyonlar vardır. Genel olarak kayıt geometrisi ve çekme hızından doğan hatalar dışındaki nedenlerden oluşan distorsiyonlar rasgele olduklarından düzeltilemezler. Ancak deniz biriminin üç boyutlu sapmaları okunup, kayıt ediliyorsa bazı düzeltmeler daha uygulanabilir.
, gemi (çekme) hızı sabit tutulamadığından boyda (görüntü sıkışması ve açısal değişim) ve enerji saçılmasından dolayı yükseklikte (genlik), kısaca her üç boyutta değişik distorsiyonlar vardır. Genel olarak kayıt geometrisi ve çekme hızından doğan hatalar dışındaki nedenlerden oluşan distorsiyonlar rasgele olduklarından düzeltilemezler. Ancak deniz biriminin üç boyutlu sapmaları okunup, kayıt ediliyorsa bazı düzeltmeler daha uygulanabilir.")
99
Derinlik Ölçümünde Güncel Teknoloji
Kayıt geometrisi ve çekme hızından doğan hataları düzeltebilmek için deniz tabanı haritalama sistemleri kullanılır. Bu sistemler, sayısal bir sonar işlemcisi olan "access unit", derin sularda kullanılan mikroişlemcili ve çok algılayıcılı deniz birimleri için güç ve kontrol sinyalleri üreten "sayısal modem", düzeltmeleri yapan mikroişlemci kontrollu tam otomatik "haritalama birimi" ile yandan taramalı sonar alt birimlerinden oluşur. Ayrıca konum belirleme verilerini elde edip haritalama birimine transfer edecek akustik ve radyo konum belirleme birimleri ile hız bilgisini sağlayacak birimlere ihtiyaç vardır. Sistemin uyguladığı üç temel düzeltme;

100
Derinlik Ölçümünde Güncel Teknoloji
- Genlik düzeltmesi: Sonograftaki bir pikselin genliği, sistem ve kullanıcıdan bağımsız olarak, deniz tabanındaki materyalin bir fonksiyonu olmalıdır. Kullanıcının belirlediği zamanla artan bir genlik kazanç kurtarım fonksiyonu (TVG), gerçekte uygulanması gereken TVG fonksiyonunu tam olarak temsil etmeyebilir. İdeal TVG fonksiyonunu belirlemek için deniz biriminden yayılan akustik dalgaları etkileyen şu faktörler dikkate alınmalıdır: - Uzaklık, - Transduser ışın demedinin şekli, - Işınların deniz tabanına iniş açıları, - Deniz tabanının yansıtma şiddeti Pikselin büyüklüğü, temsil ettiği deniz tabanı noktasının yansıtma gücünü temsil etmelidir. Kaynaktan olan mesafe ile oluşan sinyal düşmeleri aktif sonar denklemine göre tasarımlanmış bir analog TVG devresiyle karşılanır.
, gerçekte uygulanması gereken TVG fonksiyonunu tam olarak temsil etmeyebilir. İdeal TVG fonksiyonunu belirlemek için deniz biriminden yayılan akustik dalgaları etkileyen şu faktörler dikkate alınmalıdır: - Uzaklık, - Transduser ışın demedinin şekli, - Işınların deniz tabanına iniş açıları, - Deniz tabanının yansıtma şiddeti. Pikselin büyüklüğü, temsil ettiği deniz tabanı noktasının yansıtma gücünü temsil etmelidir. Kaynaktan olan mesafe ile oluşan sinyal düşmeleri aktif sonar denklemine göre tasarımlanmış bir analog TVG devresiyle karşılanır.")
101
Derinlik Ölçümünde Güncel Teknoloji
- Eğik uzaklık düzeltmesi: Her pikselin gidiş-geliş yansıma zamanına ya da diğer bir ifade ile hedefin eğik uzaklığına göre sonograf üzerinde konumlandırılmalıdır. Burada sözü geçen eğik uzaklık, deniz biriminden hedefe olan düzgün doğru parçasıdır. Transdüserin tam altındaki deniz tabanından gelen yansıma için eğik uzaklık düşeydir. Profilden yanlara doğru uzaklaştıkça eğik uzaklık doğrusu yataya doğru yaklaşır. Deniz birimi, deniz tabanından belli bir H yüksekliğinde çekildiği için sonograftaki eko imajının konumu ile hedefin gerçek yanal uzaklığı arasındaki ilişki doğrusal olmayıp, yanal deformasyon oranları farklıdır.

102
Derinlik Ölçümünde Güncel Teknoloji
Her sonar transmisyonu için yeni bir deniz birimi yüksekliği belirlenerek, bilgisayarlar yardımıyla doğrusal olamayan bu distorsiyon oranları saptanabilir ve her piksel, 1 piksel doğrulukla kendi gerçek konumuna yerleştirilebilir. Uygulamada her bir kanal için her taramada 800 eğik uzaklık düzeltmesi yapılabilmektedir. Normal koşullarda bu düzeltmeler yapılırken deniz tabanının yatay olduğu kabul edilir. Deniz tabanı eğik ise düzeltme miktarlarında değişiklik olacaktır. 15 lik deniz tabanı eğikliğinde bile gerçek konum belirlemedeki hata % 3 kadar olduğundan genellikle yalnızca eğik uzaklık düzeltmesiyle yetinilir.

103
Derinlik Ölçümünde Güncel Teknoloji
Hız düzeltmesi: Grafik kayıtçının grafik çıktı hızını, gemi hızına basit bir şekilde ayarlamakla bu düzeltme tam olarak yapılamaz. Ancak gemi hızı saatte 2.6 milden az ise bu ayarlama yeterli olabilir. Çünkü tarama aralığı hız ile değişmektedir. Hız artarken görüntü yoğunluğu azalır, tarama izleri arasındaki boşluklar genişler ve kayıt okunamaz hale gelir. Her iki yönde de eşit ölçekler verebilmek ve distorsiyonları yok etmek için sistem tarafından, gemi hızına göre veriler otomatik olarak düzeltilir. Böylece her gemi hızı için sabit bir tarama aralığı sağlanır.

104
Otomasyon Sistemleri Ölçme anındaki nokta konumunun belirlenmesi, konumu belirlenen bu nokta ile bir sonraki konum belirleme noktası arasındaki doğrultu üzerinde periyodik aralıklarla derinlik ölçümleri yapılması ve bu bilgilerin sayısal veya grafik olarak gösterilmesi, derinlik haritalarının yapımında arzu edilen hususlardır. Deniz haritacılığında otomasyon, 1950 lerin sonunda radyo seyir sistemlerinin kullanılmasıyla başlar. Bilgisayar ve mekanik çizicilerin devreye girmesiyle, delikli okuma kartlarına girilen konum belirleme okumaları, bilgisayar tarafından çizdirilmeye başlanmıştır.

105
Otomasyon Sistemleri 1965 yılında ise, bilgiler serdümenin önündeki ekrana aktarılmıştır. Klasik çizim aletlerine göre çok daha hızlı bir elektronik harita gösterimi olan bu ekranlara, bütün seyir bilgi ve noktaları çizdirilerek, hesapları kolaylıkla takip edilebilmektedir lerde okunan veriler, manyetik bant veya kasetlere sayısal olarak aktarılmaya başlanmıştır. Konum belirlemeden sonra, etüd sonu çalışmalarında derinlik verilerini otomatik olarak haritaya dökme işlemlerine de bu tarihlerde başlanılır. Günümüzde bu sistemler, radyonavigasyon sistemleri ile birlikte, yönölçer (cayro), parakete (hız logu) ve uydu sistemleri gibi birçok konum belirleme sistemleri entegre edilebilmekte ve verilerin kalite kontrolu anlık olarak yapılabilmektedir.
, parakete (hız logu) ve uydu sistemleri gibi birçok konum belirleme sistemleri entegre edilebilmekte ve verilerin kalite kontrolu anlık olarak yapılabilmektedir.")
106
Otomasyon Sistemleri Böylece konum belirleme, derinlik ölçme ve haritalama çalışmaları, boyutları küçülen bilgisayarların araştırma gemilerine monte edilmesiyle, tek bir sisteme entegre edilebilmiştir. Böyle bir sistemde, çalışma hatları ve anında hesaplanan gemi konumları, serdümen önündeki ekrana veya oto pilota gönderilebilmektedir. Son yıllarda yaygın olarak kullanılmaya başlanan otomatik konum belirleme, derinlik ölçme, depolama, veri işleme ve haritalama sistemlerinin klasik ölçme yöntemleri yerine tercih nedenleri şu şekilde sıralanabilir (Doğan ve Alpar 1994):
:")
107
Otomasyon Sistemleri Azalan rutin işler ve daha az kalifiye eleman gereksinimi, Hızlandırılmış işlem ve hesaplamalar, Karmaşık işlemlerin gösterime daha kolay sunulabilmesi, Emniyet açısından kritik alarm durumlarının anında tespiti, Yorucu rutin işlemlerden doğan kişisel hataların azaltılması, Gerekli veri ve koşulların standart bir şekilde uygun kayıt ortamlarına depolanabilmesi, Maliyet giderlerinin azalması, Gelişen veri işlem kolaylıkları, Kullanıcıların manevralarına daha fazla zaman ayırabilmeleri.

108
Otomasyon Sistemleri Gerekli durumlarda sahildeki bir gelgit ölçerden su seviyesi bilgileri telemetrik olarak sisteme sokulabilmekte ve derinlik verilerinden su seviyesi değişimlerinin etkileri çıkartılarak veriler belli bir datuma indirgenebilmektedir. Çevresel birimlerden gelen sayısal veri sinyalleri alan ve çevresel birimlere sayısal kontrol sinyalleri gönderen sistem, gerek radyonavigasyon, gerekse uydu verilerini kullanan konum belirleme aletleri ile gemideki yön ölçer ve hız ölçerden yararlanarak sürekli mevki koyabilir. Derinlik ölçme sistemlerinden gelen sayısal derinlik verileri de sistemde depolanırlar. Sistem, akustik iskandil, sismik, manyetometre ve yandan taramalı sonar gibi çevresel birimlere, belli aralıklarla veya istenen bazı özel anlarda konum markalamaları gönderir. Böylece elde edilen veriler arasında koordinasyon sağlanır. Sistemin doğru çalışması, yan birimlerin doğruluğuna bağlıdır. Bu nedenle konum belirlemede mümkün olduğunca fazla konum belirleme sistemi ve sahil istasyonu kullanılmasına özen gösterilmektedir. Çalışma sonrası elde edilen veriler, veri işlem teknikleri uygulanarak haritalanabilir.

109
Otomasyon Sistemleri Derinlik haritalarında dip topografyası birçok değişik biçimde belirtilebilir. Yaygın olarak kullanılan seyir haritalarında, yoğun aralıklarla derinlik değerleri belirtilerek belli aralıklarla eş derinlik eğrileri çizilmektedir. Ülkemizde memleket kara haritaları içinde kalan kıyı denizlere ait hidrografik çalışmalar Gauss-Krüger projeksiyonuna göre çizilmektedir. Diğer bir harita şekli ise, derinliklerin belli aralıklı eş derinlik eğrileriyle belirtildiği haritalardır. Bunlar kullanıcının dip topografyasını daha iyi algılayabilmesini sağlar. Diğer batimetri haritaları ise, renklendirilmiş haritalar, şekillendirilmiş boyamalı haritalar ve gölgelendirilmiş şekilli haritalar olup, eş derinlik eğrilerinin çizilmediği yerlerde gerçek derinlikleri gösteremedikleri için pek kullanışlı değildirler.

110
Otomasyon Sistemleri Hidrografik haritaların yapılması için açılan paftalara önce jeodezik noktalar işaretlendikten sonra kıyı şeridine ait ayrıntılar işlenir. Daha sonra her konum noktası için ölçülmüş olan derinlik değerleri haritaya geçirilir. Profiller, gridler şeklinde alınmışsa, kesim noktalarındaki derinliklerin birbirleriyle uyuşumu kontrol edilir. Haritaya geçirilecek değerler, düzeltilmiş ve indirgenmiş değerler olmalıdır. Otomatik veri toplama, depolama ve işleme sisteminde ise, haritalama işlemi yapılmadan önce sistem konfigürasyonu, çalışma hatları, veri tabanları ve gelgit dosyaları hazırlanmalıdır. Daha sonra kayıt verilerin, işlenebilir XYZ dosyalarına formatlanması, ölçme noktaları ve yardımcı seyir istasyonlarının XY koordinatlarının datum indirgemesi yapılır. Bu çevrimdeki en önemli işlemler, derinlik düzeltmeleri ile ilgili olanlardır (Doğan ve Alpar 1994):
:")
111
Otomasyon Sistemleri Gelgit Düzeltmesi: Ses Hızı Düzeltmesi :
Su seviyesi verilerinin hazırlanması, Temel istasyondan olan zaman farkına göre gelgit hesabı, Ortalama gelgit seviyesinin girilmesi, Derinlik dosyalarının düzeltilmesi. Ses Hızı Düzeltmesi : Sudaki ses hızlarının derinliğe göre sisteme girilmesi, Bu verilerin dosyalanması, Bundan sonra, kaydedilen ham derinlik verilerinin ses hızı, gelgit ve transdüser derinliği düzeltmeleri, hazırlanan veri dosyalarına göre sistem tarafından otomatik olarak yapılır

Benzer bir sunumlar







 Son konum = +15 m (x1)>")


>")










