Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
MikroC ile PIC Programlama
9.Hafta Mikrodenetleyiciler

2
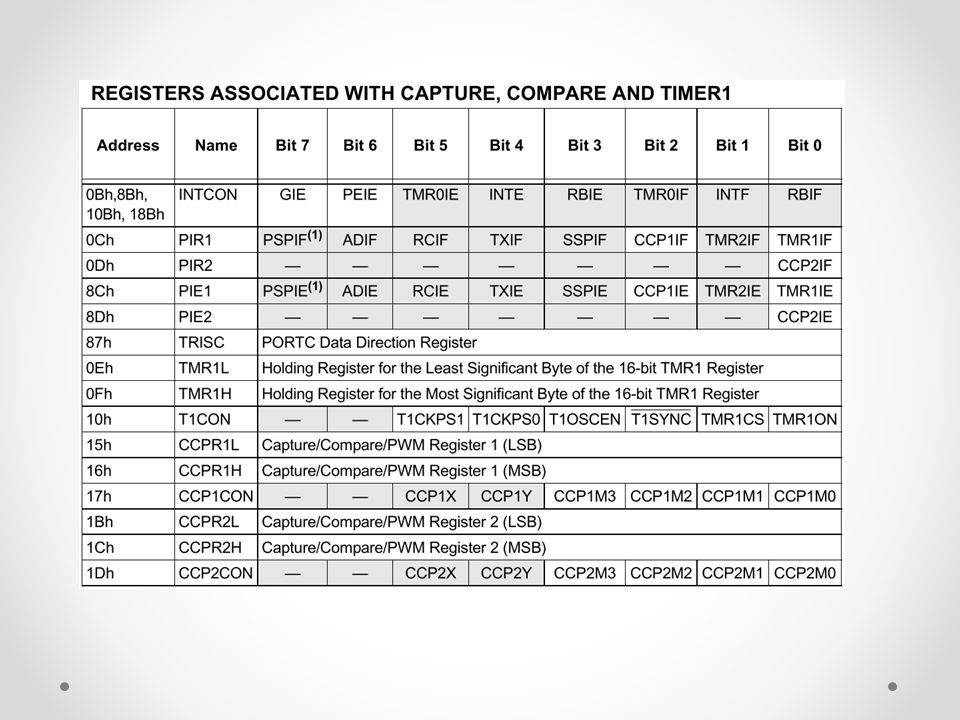
16F877 CCP Modülü 16f877 içerisinde 2 adet CCP donanım modülü bulunmaktadır. Bunlar CCP1 ve CCP2 olarak adlandırılmaktadır. CCP modülü sayesinde donanımsal olarak yakalama (capture), karşılaştırma (compare) ve PWM sinyali üretme işlemleri yapılabilir. CCP modülünün çalışma modları için ihtiyaç duyulan zamanlama/sayma referansı 16f877 içerisinde bulunan Timer/Counter birimleri tarafından karşılanır. Bu amaçla, Capture ve Compare için Timer1 zamanlayıcısı, PWM modu için Timer2 zamanlayıcısı kullanılmaktadır. Mikrodenetleyiciler
, karşılaştırma (compare) ve PWM sinyali üretme işlemleri yapılabilir. CCP modülünün çalışma modları için ihtiyaç duyulan zamanlama/sayma referansı 16f877 içerisinde bulunan Timer/Counter birimleri tarafından karşılanır. Bu amaçla, Capture ve Compare için Timer1 zamanlayıcısı, PWM modu için Timer2 zamanlayıcısı kullanılmaktadır. Mikrodenetleyiciler.")
3
CCP1 Modülü CCP modülü, düşük kısmı 8 bit olan CCPR1L ,yüksek kısmı 8 bit olan CCPR1H olan ve CCPR1 olarak adlandırılan bir kaydediciden oluşmaktadır (2 adet 8-bit yazmaç). CCP1 modülünün işlemleri ise CCP1CON kaydedicisi tarafından kontrol edilmektedir. Bu modüldeki kaydedicilerin tümü yazılabilir ve okunabilir özelliktedirler. PIC 16F877’nin CCP modülleri olan CCP1 ve CCP2’nin çalışmaları özel tetikleyicileri dışında hemen hemen aynıdır. CCP Timer İlişkisi
. CCP1 modülünün işlemleri ise CCP1CON kaydedicisi tarafından kontrol edilmektedir. Bu modüldeki kaydedicilerin tümü yazılabilir ve okunabilir özelliktedirler. PIC 16F877’nin CCP modülleri olan CCP1 ve CCP2’nin çalışmaları özel tetikleyicileri dışında hemen hemen aynıdır. CCP Timer İlişkisi.")
4
CAPTURE (Yakalama) Modu
Capture modunda; RC2/CCP1 pinindeki bir takım olaylarla (RC2/CCP1 pini üzerinde bir olay oluştuğunda) TMR1’in 16 bitlik değerini yakalanır ve CCPR1H:CCPR1L e kaydedilir. RC2/CCP1’deki olaylar şu şekilde tanımlanmaktadır: • Her düşen kenar • Her yükselen kenar • Her 4. yükselen kenar • Her 16. yükselen kenar RC2/CCP1’deki bu durumlardan birisi CCPxM0:CCPxM3 bitleri sayesinde seçilir. Bir yakalama işlemi gerçekleştiğinde CCP1IF (PIR1,2) kesme bayrağı set olur ve bir kesme talebinde bulunulur. Eğer yeni bir yakalama gerçekleşirse CCP1R kaydedicisine yeni değer kaydedilir ve eski değer tamamıyla silinir.
 TMR1’in 16 bitlik değerini yakalanır ve CCPR1H:CCPR1L e kaydedilir. RC2/CCP1’deki olaylar şu şekilde tanımlanmaktadır: • Her düşen kenar • Her yükselen kenar • Her 4. yükselen kenar • Her 16. yükselen kenar RC2/CCP1’deki bu durumlardan birisi CCPxM0:CCPxM3 bitleri sayesinde seçilir. Bir yakalama işlemi gerçekleştiğinde CCP1IF (PIR1,2) kesme bayrağı set olur ve bir kesme talebinde bulunulur. Eğer yeni bir yakalama gerçekleşirse CCP1R kaydedicisine yeni değer kaydedilir ve eski değer tamamıyla silinir.")
5
CCP1CON – CCP2CON Kaydedicisi
CCP modüllerinin yaptığı işlemleri denetler ve yetkilendirmeleri yapar. CCPxCON,0:3(CCPxM0:CCPxM3): CCP birimleri için mod seçim bitleridir. Bu bitlerin aldığı değerlere göre CCP1 modülü capture/compare/PWM modlarında çalıştırılabilir. 0000 = Capture/Compare/PWM etkin değil (CPM kullanım dışı ) 0100 = Capture modu, her düşen kenarda 0101 = Capture modu, her yükselen kenarda 0110 = Capture modu,her 4. yükselen kenarda 0111 = Capture modu, every 16. yükselen kenarda 1000 = Compare modu, denklik durumunda çıkışı 1’le(H) (CCPxIF=1) 1001 = Compare modu, denklik durumunda çıkışı 0’la (L) (CCPxIF=1) 1010 = Compare modu, denklik durumnda yazılım kesmesi üret 1011 = Compare modu, özel tetikleme (CCPxIF=1, CCP1 TMR1’i resetler, CCP2 TMR1’i resetler ve A/D çevirme başlar.(Eğer A/D çevirme modülü yetkilendirilmişse).) 11xx = PWM modu CCP1CON,4:5(CCPxX:CCPxY): CCP modülün PWM modundaki Lsb ayarlarını gerçekleştiren bitlerdir.
: CCP birimleri için mod seçim bitleridir. Bu bitlerin aldığı değerlere göre CCP1 modülü capture/compare/PWM modlarında çalıştırılabilir = Capture/Compare/PWM etkin değil (CPM kullanım dışı ) 0100 = Capture modu, her düşen kenarda = Capture modu, her yükselen kenarda = Capture modu,her 4. yükselen kenarda = Capture modu, every 16. yükselen kenarda = Compare modu, denklik durumunda çıkışı 1’le(H) (CCPxIF=1) 1001 = Compare modu, denklik durumunda çıkışı 0’la (L) (CCPxIF=1) 1010 = Compare modu, denklik durumnda yazılım kesmesi üret = Compare modu, özel tetikleme (CCPxIF=1, CCP1 TMR1’i resetler, CCP2 TMR1’i resetler ve A/D çevirme başlar.(Eğer A/D çevirme modülü yetkilendirilmişse).) 11xx = PWM modu. CCP1CON,4:5(CCPxX:CCPxY): CCP modülün PWM modundaki Lsb ayarlarını. gerçekleştiren bitlerdir.")
6
CCP1CON – CCP2CON Kaydedicisi
CCP modüllerinin yaptığı işlemleri denetler ve yetkilendirmeleri yapar. CCP’de prescaler ayarlarını gerçekleştirmek üzere; CCP1M3:CCP1M0 bitleri ayrılmıştır. CCP modülü kullanım dışı ise veya CCP modülü capture modunda kullanılmıyorsa prescaler sayıcısı temizlenmiş vaziyette durur. Bu herhangi bir resetleme durumunda prescalerin temizleneceği anlamına gelir. Capture prescaler’i diğer bir kesmenin üretilmesi durumunda değişim gösterir. Örnekde CCP prescalerin kurulmasına dair bir örnek verilmiştir. Bu örnek programda prescaler sayıcı temizlenmiştir ve hata kesmelerinin üretilmesi engellenmiştir. 0100 = Capture modu, her düşen kenarda 0101 = Capture modu, her yükselen kenarda 0110 = Capture modu,her 4. yükselen kenarda 0111 = Capture modu, every 16. yükselen kenarda

8
Capture Modunda Pin Durumu
Capture modunda RC2/CCP1 pini TRISC<2> vasıtasıyla giriş olarak ayarlanmalıdır. Bu sayede RC2/CCP1 pini capture işlemi için gerekli saat palsini alabilecektir. Şekilde capture modunda veri yakalama işleminin nasıl gerçekleştiğini gösteren diyagram bulunmaktadır. Capture birimini kullanmak için; Timer1 CCP birimlerinin ayarları yapılır. Kesmeden yararlanılacaksa CCPxIE ve CCPxIF birimleri set edilir veya temizlenir. Olay yakalama yaparak ne kadar süre geçtiyse, geçen süreyi Timer1 zamanlayıcısından alarak CCP biriminin özel kaydedicilerine yükler. Daha sonra CCP birimine kaydedilen zamanlar okunarak gerekli işlemler yapılır. Encoder ile hız hesaplaması, frekans hesaplaması, .. vs uygulamalarda kullanılabilir.

9
MikroC ile Capture örneği
Örnek: RC2 pinine bağlı butona 4 kez basıldığında Timer değeri yakalanır. PortB içeriği bir arttırılır. void interrupt() { if (CCP1IF) portb++; // CCP1 yakalama oluştu, portb içeriğini 1 artır // TMR1'in içeriği otomatik olarak CCPR1 içeriğine aktarılır. CCP1IF_bit = 0; // CCP1IF bayrağı temizlendi } void main() { ADCON1 = 0x07; // AN pinleri dijital I/O yapılandırıldı CMCON = 0; // Comparators (karşılaştırıcılar) pasif edildi TRISB = 0x00; // PORTB çıkış yapıldı PORTB = 0x00; // PORTB temizlendi TMR1L = 0x00; // TMR1L ve TMR1H kaydedici çifti sıfırlandı TMR1H = 0x00; T1CON = 0x33; // TMR1 1:8 prescaler ve T13CKI girişinden gelen // her 8. yükselen darbe kenarında 1 artmaya ayarlandı TRIS.RC2 = 1; // RC2 pini giriş yapıldı CCPR1L = 0x00; // CCPR1L ve CCPR1H kaydedici içeriği temizlendi CCPR1H = 0x00; CCP1CON = 0x06; // CCP1 donanımı sinyalin her yükselen 4. kenarını CCP1IE_bit = 1; // yakalar. CCP1 donanımı aktif edildi. INTCON = 0xC0; // GIE, PEIE bitleri set edildi while(1) { } // Sonsuz döngü.
 { if (CCP1IF) portb++; // CCP1 yakalama oluştu, portb içeriğini 1 artır. // TMR1 in içeriği otomatik olarak CCPR1 içeriğine aktarılır. CCP1IF_bit = 0; // CCP1IF bayrağı temizlendi. } void main() { ADCON1 = 0x07; // AN pinleri dijital I/O yapılandırıldı. CMCON = 0; // Comparators (karşılaştırıcılar) pasif edildi. TRISB = 0x00; // PORTB çıkış yapıldı. PORTB = 0x00; // PORTB temizlendi. TMR1L = 0x00; // TMR1L ve TMR1H kaydedici çifti sıfırlandı. TMR1H = 0x00; T1CON = 0x33; // TMR1 1:8 prescaler ve T13CKI girişinden gelen. // her 8. yükselen darbe kenarında 1 artmaya ayarlandı. TRIS.RC2 = 1; // RC2 pini giriş yapıldı. CCPR1L = 0x00; // CCPR1L ve CCPR1H kaydedici içeriği temizlendi. CCPR1H = 0x00; CCP1CON = 0x06; // CCP1 donanımı sinyalin her yükselen 4. kenarını. CCP1IE_bit = 1; // yakalar. CCP1 donanımı aktif edildi. INTCON = 0xC0; // GIE, PEIE bitleri set edildi. while(1) { } // Sonsuz döngü.")
10
COMPARE (Karşılaştırma) Modu
 Modu")
11
COMPARE (Karşılaştırma) Modu
Öncelikle Timer1 ve Compare modu ayarları yapılır. CCPRxH ve CCPRxL kaydedicilerine yakalanmak istenen sayı yüklenir, (Örneğin 20 kez tuşa basılması.) Timer1 harici kaynak beslemesi kullanılır. Timer1 dış osilatör girişine bağlanan butonla TMR1 kaydedicisinin değeri artar. TMR1 kaydedicisi ile CCPRx kaydedicisi birbirine eşit olduğunda kesme bayrağı set edilir. (Tuşa 20 kez basıldığında C2 pini set edilir) Örnek uygulama devresi
 Timer1 harici kaynak beslemesi kullanılır. Timer1 dış osilatör girişine bağlanan butonla TMR1 kaydedicisinin değeri artar. TMR1 kaydedicisi ile CCPRx kaydedicisi birbirine eşit olduğunda kesme bayrağı set edilir. (Tuşa 20 kez basıldığında C2 pini set edilir) Örnek uygulama devresi.")
12
MikroC ile Compare örneği
Örnek: CCPR1 değeri 3, timer1 8 darbede artım için Compare örneği, 3*8=24 darbede sayan program void interrupt() { if (CCP1IF) portb.rb7 = 1; CCP1IF_bit = 0; // CCP1IF bayrağı temizlendi } void main() { ADCON1 = 0x07; // AN pinleri dijital I/O yapılandırıldı CMCON = 0; // Comparators (karşılaştırıcılar) pasif edildi TRISB = 0x00; // PORTB çıkış yapıldı PORTB = 0x00; // PORTB temizlendi TRISC.RC0 = 1; // RC0/T13CKI pini giriş yapıldı. TMR1L = 0x00; // TMR1L ve TMR1H kaydedici çifti sıfırlandı TMR1H = 0x00; T1CON = 0x33; // TMR1 1:8 prescaler ve PORTC0/T13CKI girişinden gelen // her 8. yükselen darbe kenarında 1 artmaya ayarlandı CCPR1L = 0x03; // TMR1 ile CCPR karşılaştırması için CCPR1L = 0x03 CCPR1H = 0x00; // değeri yüklendi. CCP1CON = 0x0B; // CCP1 donanımı Compare modu, özel tetikleme modu CCP1IE_bit = 1; // CCP1 donanımı aktif edildi. INTCON = 0xC0; // GIE, PEIE bitleri set edildi while(1); // Sonsuz döngü.
 { if (CCP1IF) portb.rb7 = 1; CCP1IF_bit = 0; // CCP1IF bayrağı temizlendi. } void main() { ADCON1 = 0x07; // AN pinleri dijital I/O yapılandırıldı. CMCON = 0; // Comparators (karşılaştırıcılar) pasif edildi. TRISB = 0x00; // PORTB çıkış yapıldı. PORTB = 0x00; // PORTB temizlendi. TRISC.RC0 = 1; // RC0/T13CKI pini giriş yapıldı. TMR1L = 0x00; // TMR1L ve TMR1H kaydedici çifti sıfırlandı. TMR1H = 0x00; T1CON = 0x33; // TMR1 1:8 prescaler ve PORTC0/T13CKI girişinden gelen. // her 8. yükselen darbe kenarında 1 artmaya ayarlandı. CCPR1L = 0x03; // TMR1 ile CCPR karşılaştırması için CCPR1L = 0x03. CCPR1H = 0x00; // değeri yüklendi. CCP1CON = 0x0B; // CCP1 donanımı Compare modu, özel tetikleme modu. CCP1IE_bit = 1; // CCP1 donanımı aktif edildi. INTCON = 0xC0; // GIE, PEIE bitleri set edildi. while(1); // Sonsuz döngü.")
13
PWM (Pulse Width Modulation) Darbe Genişlik Modülasyonu
PWM, Darbe Genişlik Modülasyonu), üretilecek olan darbelerin, genişliklerini kontrol ederek, çıkışta üretilmek istenen analog elektriksel değerin veya sinyalin elde edilmesi tekniğidir. PWM elektrik ve elektronikte birçok alanda, farklı amaçlar için kullanılmaktadır. Telekomünikasyon, güç elektroniği, motor sürücüler, voltaj düzenleyiciler, ses üreteçleri veya yükselteçler gibi çeşitli uygulama alanları ve farklı uygulamaları bulunmaktadır. Analog olarak testere dişi sinyalin, DC yada AC kontrol voltajı ile karşılaştırılması ile elde edilir.
, üretilecek olan darbelerin, genişliklerini kontrol ederek, çıkışta üretilmek istenen analog elektriksel değerin veya sinyalin elde edilmesi tekniğidir. PWM elektrik ve elektronikte birçok alanda, farklı amaçlar için kullanılmaktadır. Telekomünikasyon, güç elektroniği, motor sürücüler, voltaj düzenleyiciler, ses üreteçleri veya yükselteçler gibi çeşitli uygulama alanları ve farklı uygulamaları bulunmaktadır. Analog olarak testere dişi sinyalin, DC yada AC kontrol voltajı ile karşılaştırılması ile elde edilir.")
14
PWM (Pulse Width Modulation)
Üretilen kare dalga darbe sinyallerinin genişliklerinin ortalaması, çıkışta üretilecek olan analog değerin elde edilmesini sağlar. Ymin = 0 olduğunda ortalama gerilim Yort= D . Ymax olmaktadır. D: Duty (İş yapma periyodu) T: PWM periyodu
 T: PWM periyodu.")
15
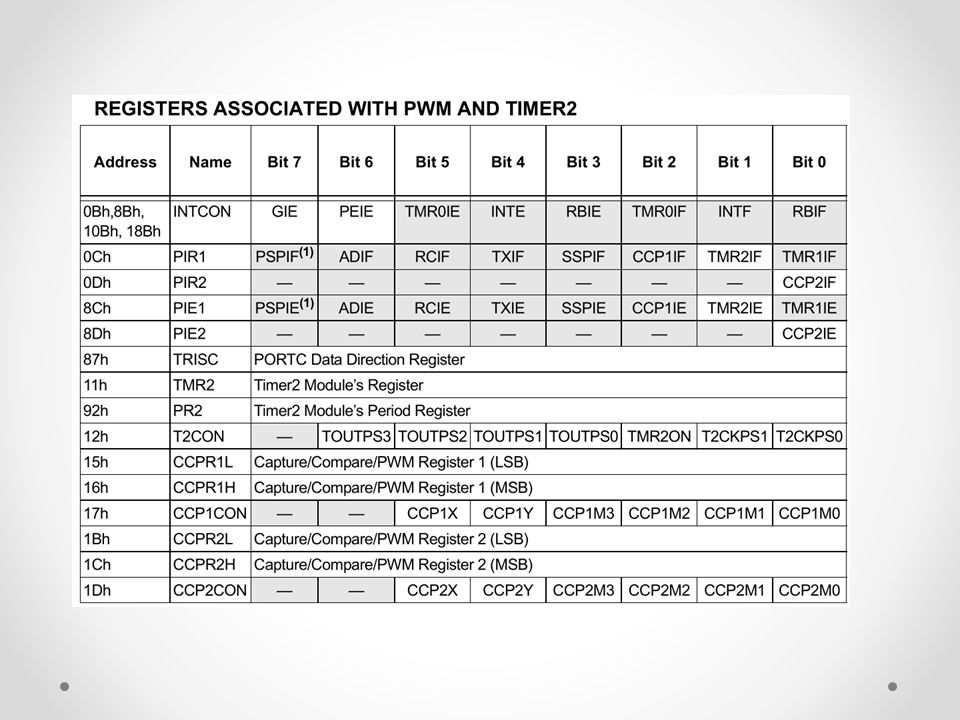
PWM CCP biriminin PWM modu, istenen CCPx ucundan istenen görev çevrimine (duty cycle - doluluk oranı) sahip PWM sinyali elde etmek için kullanılır. PWM birimi Timer2 zamanlayıcısını kullanır. PIC16f877'de iki adet CCP modülü olduğundan 2 adet de 10 bit PWM çıkış ucu vardır. PWM modunda, PWM çıkışı olarak kullanılan RC1/T1OSI/CCP2 ve RC2/CCP1 pin'leri çıkış olarak yönlendirilmelidir. Duty periyodunu için üst 8bit CCPRxL de, alt 2 bit CCPxX, CCPxY tir. (x=1,2). Bu bitlerin CCPxCON<5:4> kaydedicisindeki isimleri DCxB0, DCxB1 dir.
 sahip PWM sinyali elde etmek için kullanılır. PWM birimi Timer2 zamanlayıcısını kullanır. PIC16f877 de iki adet CCP modülü olduğundan 2 adet de 10 bit PWM çıkış ucu vardır. PWM modunda, PWM çıkışı olarak kullanılan RC1/T1OSI/CCP2 ve RC2/CCP1 pin leri çıkış olarak yönlendirilmelidir. Duty periyodunu için üst 8bit CCPRxL de, alt 2 bit CCPxX, CCPxY tir. (x=1,2). Bu bitlerin CCPxCON<5:4> kaydedicisindeki isimleri DCxB0, DCxB1 dir.")
16
PWM

17
PWM PWM sinyali aşağıdaki adımlarda oluşur;
- TMR2, PR2’ye eşit olduğunda TMR2 temizlenir, - CCPx pini set edilir (Duty cycle=%0 ise set edilmez), - CCPRxL’den CCPRxH’a yükleme gerçekleşir. - Duty cycle, PWM periyodundan büyük olamaz.
, - CCPRxL’den CCPRxH’a yükleme gerçekleşir. - Duty cycle, PWM periyodundan büyük olamaz.")
19
PWM başlatılması PWM periyodu PR2 kaydedicisine yazılarak ayarlanır.
2. PWM duty periyodu CCPR1L and CCP1CON<5:4> kaydedici ve bitlerine yazılarak kurulur. 3. CCP1 modülü için TRISC<2> biti çıkış olarak alınır. 4. Set the TMR2 prescale değeri ayarlanır ve Timer2, T2CON kullanılarak etkinleştirilir (enable biti ile) 5. CCP1 modulü PWM operasyonu için CCP1CON ile ayarlanır. Mikrodenetleyiciler
 5. CCP1 modulü PWM operasyonu için CCP1CON ile ayarlanır. Mikrodenetleyiciler.")
20
MikroC ile PWM örneği Örnek: RC2 pinine PWM1 modülü üzerinde 8 Mhz osc, Fpwm= 2 kHz için uygulama. void main() { ADCON1 = 0x07; CMCON = 0; TRISC.RC2=0; // PWM1 modulu çıkışı T2CKPS1_bit=0; // 0b01 icin TMR2 prescaler 4 T2CKPS0_bit=1; PR2=0xFF; CCPR1L=0x01; // PWM için Yüksek 8 bit CCP1CON.CCP1X= 0; CCP1CON.CCP1Y= 0; // PWM için Düşük 2 bit TMR2ON_bit=1; CCP1CON=0b ; // 0bxxxx11xx icin PWM modu while(1){ CCPR1L=0x3F; // Yüzde 25 Duty Delay_Ms(500); CCPR1L=0x7F; // Yüzde 50 Duty CCPR1L=0xC0; // Yüzde 75 Duty CCPR1L=0xFE; // yaklaşık Yüzde 95 Duty } // Sonsuz döngü. }
{ CCPR1L=0x3F; // Yüzde 25 Duty. Delay_Ms(500); CCPR1L=0x7F; // Yüzde 50 Duty. CCPR1L=0xC0; // Yüzde 75 Duty. CCPR1L=0xFE; // yaklaşık Yüzde 95 Duty. } // Sonsuz döngü. }")
21
MikroC PWM kütüphanesi
MikroC PWM rutinleri PWM1_Init PWM1_Set_Duty PWM1_Start PWM1_Stop PWM1_Init : PWM1 modülünü içerisine yazılan PWM frekansı olacak şekilde tüm gerekli kaydedicileri ile birlikte ayarlar. Frekans değeri long tipi ve Hertz cinsindendir. void PWM1_Init(const long freq); Örnek: 5 kHz için PWM modülü ayarlanması , PWM1_Init(5000); PWM1_Set_Duty : Duty periyonun yüzdesini değiştirilip belirlenmesini sağlar. %0 için 0, %50 için 127 ve %100 duty için 255 olacak şekilde arası short tipi değer girilir. Örnek: %75 duty nin ayarlanması, PWM1_Set_Duty(192); PWM1_Start : PWM modülünü başlatır PWM1_Start(); PWM1_Stop : PWM modülünü durdurulur. PWM1_Stop(); Mikrodenetleyiciler
; Örnek: 5 kHz için PWM modülü ayarlanması , PWM1_Init(5000); PWM1_Set_Duty : Duty periyonun yüzdesini değiştirilip belirlenmesini sağlar. %0 için 0, %50 için 127 ve %100 duty için 255 olacak şekilde arası short tipi değer girilir. Örnek: %75 duty nin ayarlanması, PWM1_Set_Duty(192); PWM1_Start : PWM modülünü başlatır. PWM1_Start(); PWM1_Stop : PWM modülünü durdurulur. PWM1_Stop(); Mikrodenetleyiciler.")
22
MikroC ile PWM örneği Örnek: RC2 pinine PWM1 modülü üzerinde 8 Mhz osc, Fpwm= 2 kHz için uygulama. Kütüphanesiz void main() { ADCON1 = 0x07; CMCON = 0; TRISC.RC2=0; // PWM1 modulu çıkışı T2CKPS1_bit=0; // 0b01 icin TMR2 prescaler 4 T2CKPS0_bit=1; PR2=0xFF; CCPR1L=0x01; // PWM için Yüksek 8 bit CCP1CON.CCP1X= 0; CCP1CON.CCP1Y= 0; // PWM için Düşük 2 bit TMR2ON_bit=1; CCP1CON=0b ; // 0bxxxx11xx icin PWM modu while(1){ CCPR1L=0x3F; // Yüzde 25 Duty Delay_Ms(500); CCPR1L=0x7F; // Yüzde 50 Duty CCPR1L=0xC0; // Yüzde 75 Duty CCPR1L=0xFE; // yaklaşık Yüzde 95 Duty Delay_Ms(500); } // Sonsuz döngü. } Kütüphane ile void main() { ADCON1 = 0x07; CMCON = 0; TRISC.RC2=0; // PWM1 modulu çıkışı PWM1_Init(2000); // 2kHz PWM frekansı PWM1_Set_Duty(192); PWM1_Start(); while(1){ PWM1_Set_Duty(63); // Yüzde 25 Duty Delay_Ms(500); PWM1_Set_Duty(127); // Yüzde 50 Duty PWM1_Set_Duty(192); // Yüzde 75 Duty PWM1_Set_Duty(250); // yaklaşık Yüzde 95 Duty Delay_Ms(500); } // Sonsuz döngü. }
 { ADCON1 = 0x07; CMCON = 0; TRISC.RC2=0; // PWM1 modulu çıkışı. T2CKPS1_bit=0; // 0b01 icin TMR2 prescaler 4. T2CKPS0_bit=1; PR2=0xFF; CCPR1L=0x01; // PWM için Yüksek 8 bit. CCP1CON.CCP1X= 0; CCP1CON.CCP1Y= 0; // PWM için Düşük 2 bit. TMR2ON_bit=1; CCP1CON=0b ; // 0bxxxx11xx icin PWM modu. while(1){ CCPR1L=0x3F; // Yüzde 25 Duty. Delay_Ms(500); CCPR1L=0x7F; // Yüzde 50 Duty. CCPR1L=0xC0; // Yüzde 75 Duty. CCPR1L=0xFE; // yaklaşık Yüzde 95 Duty. Delay_Ms(500); } // Sonsuz döngü. } Kütüphane ile. void main() { ADCON1 = 0x07; CMCON = 0; TRISC.RC2=0; // PWM1 modulu çıkışı. PWM1_Init(2000); // 2kHz PWM frekansı. PWM1_Set_Duty(192); PWM1_Start(); while(1){ PWM1_Set_Duty(63); // Yüzde 25 Duty. Delay_Ms(500); PWM1_Set_Duty(127); // Yüzde 50 Duty. PWM1_Set_Duty(192); // Yüzde 75 Duty. PWM1_Set_Duty(250); // yaklaşık Yüzde 95 Duty. Delay_Ms(500); } // Sonsuz döngü. }")
23
Analog Comparator (Karşılaştırıcı)
16f877A içerisinde 2 adet ANALOG KARŞILAŞTIRMA donanım modülü bulunmaktadır. Modüller 8 farklı modda çalışabilmektedir… RA0 – RA3 pinleri modül1 RA1 – RA2 pinleri modül2 Mikrodenetleyiciler

24
Analog Comparator (Karşılaştırıcı)
Karşılaştırma yapabilmek için RA0 – RA3 pinleri analog giriş olarak ayarlanmalıdır. Karşılaştırıcı modül çıkışı olarak ise RA4 ve RA5 pinleri kullanılabilir. RA4 pini açık kollektör yapı içerdiğinden dolayı çıkış olarak kullanabilmek için pull-up direnci bağlanmalıdır. CMCON kaydedicisi kullanılarak modül ayarları yapılır. Mikrodenetleyiciler

25
Analog Comparator (Karşılaştırıcı)
CMCON : Karşılaştırıcı kontrol ve ayar kaydedicisi CVRCON : Karşılaştırıcı gerilim referans kontrol ve ayar kaydedicisi INTCON : Kesme kontrol ve ayar kaydedicisi PIR2 : Kesme bildirim kaydedicisi PIE2 : Kesme ayar kaydedicisi PORTA : Giriş ve çıkış pin kaydedicileri TRISA : pin yönlendirme kaydedicileri Mikrodenetleyiciler

26
Analog Comparator (Karşılaştırıcı)
Mikrodenetleyiciler

27
Analog Comparator (Karşılaştırıcı)
Mikrodenetleyiciler

28
Analog Comparator (Karşılaştırıcı)
Mikrodenetleyiciler

29
Karşılaştırıcı Gerilim Referans Modülü
Mikrodenetleyiciler

30
MikroC ile Komparatör örneği
void main() { TRISA = 0x0f; // RA3:RA0 giriş, diğerleri çıkış PORTA = 0; // PORTA sıfırlandı CMCON = 3; // İki bağımsız karşılaştırıcı, çıkış PIC çıkışları TRISB.RB0=0; // PORTB0 çıkış while(1){ PORTB.RB0=C2OUT_bit; // karşılaştırıcı çıkışı B0'a da yazılıyor. }
 { TRISA = 0x0f; // RA3:RA0 giriş, diğerleri çıkış. PORTA = 0; // PORTA sıfırlandı. CMCON = 3; // İki bağımsız karşılaştırıcı, çıkış PIC çıkışları. TRISB.RB0=0; // PORTB0 çıkış. while(1){ PORTB.RB0=C2OUT_bit; // karşılaştırıcı çıkışı B0 a da yazılıyor. }")
Benzer bir sunumlar







>")











