Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
Yrd.Doç.Dr. Mustafa Doğan
PID Denetleyiciler Yrd.Doç.Dr. Mustafa Doğan

2
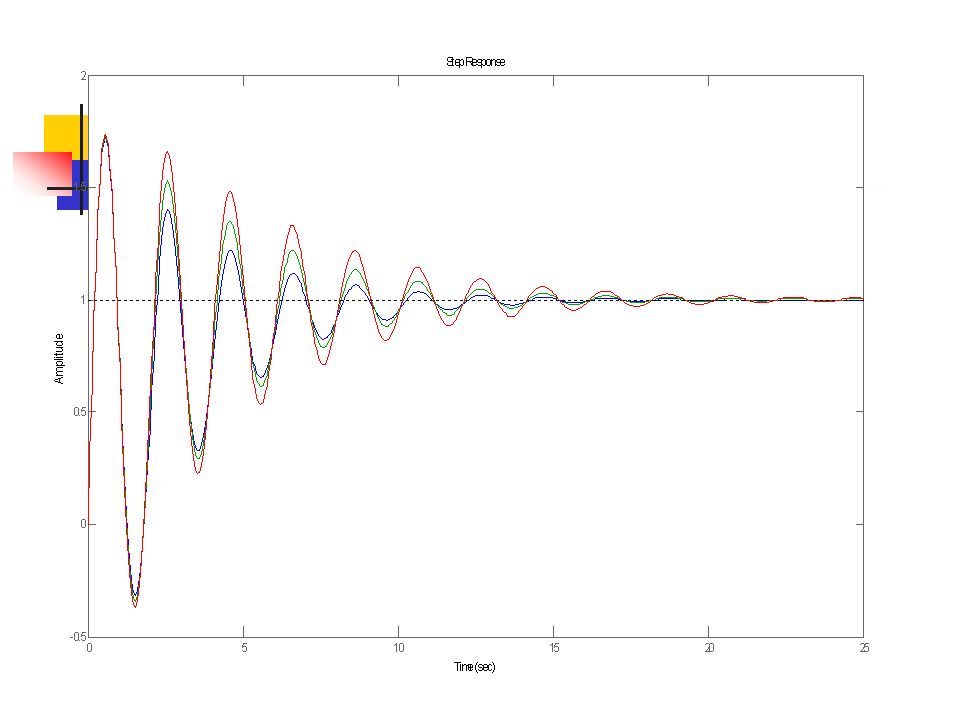
Karmaşık Eşlenik Kutup Bulunan Sistemin PID ile Denetlenmesi
Aktarım İşlevi: MATLAB Komutları: G=tf (5, [1 -4 5] ) s=tf('s') Kp=1 Td=1 for Ti=[0.7:0.2:1.1] Gc=Kp*(1+Ti/s+Td*s) G_c=feedback(Gc*G,1) step(G_c) hold on end
 s=tf( s ) Kp=1. Td=1. for Ti=[0.7:0.2:1.1] Gc=Kp*(1+Ti/s+Td*s) G_c=feedback(Gc*G,1) step(G_c) hold on. end.")
4
Ziegler-Nichols Ayarlama Yöntemi
Matematiksel modeli olmayan ya da kolay çıkarılamayan sistemlerde PID denetleyicilerinin parametrelerini (KP, Ti, TD) belirlemekte kullanılır. Bir deneysel yaklaşım yöntemidir.
 belirlemekte kullanılır. Bir deneysel yaklaşım yöntemidir.")
5
Ziegler-Nichols Ayarlama Yöntemleri
Açık-Döngü Yöntemi Kapalı-Döngü Yöntemi

6
Açık-Döngü Yöntemi

7
Açık-Döngü Yöntemine Göre Ziegler-Nichols Kuralları
Denetleyici Tipi KP Ti TD P T/L PI 0.9*T/L L/0.3 PID 1.2*T/L 2*L 0.5*L

8
Ayarlanan Parametrelere Göre PID Denetleyicinin Aktarım İşlevi

9
Açık-Döngü Yöntemi ile PID Denetleyici Tasarlanması

10
SİSTEMİN AÇIK DÖNGÜ CEVABI
Bükülme Noktası L=0.76 T=1.96

11
P, PI ve PID Denetleyicilerinin Aktarım İşlevleri

12
Sisteme P, PI ve PID ile Denetleyicileri Uygulandıktan Sonra Kapalı-Döngü Basamak Cevabı

13
Kapalı-Döngü Yöntemi Tc
Kc=Çıkış salınıma başlamadan önceki en yüksek oransal kazanç Tc= Çıkışın Salınım Periyodu

14
Kapalı-Döngü Yöntemine Göre Ziegler-Nichols Kuralları
Denetleyici Tipi KP Tİ TD P 0.5*Kc PI 0.4*Kc 0.8*Tc PID 0.6*Kc 0.5*Tc 0.125*Tc

15
Kapalı-Döngü Yöntemine Göre PID Denetleyicinin Aktarım İşlevi

16
Kapalı-Döngü Yöntemiyle Hız Sabitleme Sistemi İçin Denetleyici Tasarlanması
Hız sabitleme sisteminin açık döngü basamak cevabı S-Şekilli bir eğriye sahip değildir. Sisteme sadece oransal denetim eklenip, sistemin kritik K değeri bulunur.

17
Kapalı-Döngü Yönteminin Hız Sabitleme Sistemine Uygulanması

18
Kritik K değeri bulunduktan sonra çıkış sinyalinin salınım periyodu bulunur.

19
Tc

20
Ziegler-Nichols’ün Kapalı-Döngü Yöntemine Göre P, PI ve PID Denetleyicilerin Aktarım İşlevleri

21
Sistemin, PI Denetleyici Eklendikten Sonra SIMULINK Çizimi

22
PI Denetleyici Eklendikten Sonra Benzetim Sonucu

23
Sistemin, PID Denetleyici Eklendikten Sonra SIMULINK Çizimi

24
PI Denetleyici Eklendikten Sonra Benzetim Sonucu

Benzer bir sunumlar



 bozucu etkidir. R(s) hedef girdidir. C(s) cevaptır. a) K=150 için açık sistemin Bode diyagramını çizen ve marjinleri.>")



 s ( R D(s): Kapalı sistemin paydası>")



 MEASURING DEVICES (SENSORS) Sıcaklık algılayıcıları (temperature sensors) –Isıl çift (thermocouple) –Hazneli termometre.>")






![Yazılım Mühendisliği1[ 3.hft ]. Yazılım Mühendisliği2 Yazılım İ sterlerinin Çözümlemesi Yazılım Yaşam Çevrimi “ Yazılım Yaşam çevrimin herhangi bir yazılım.](/38/10819178/big_thumb.jpg "Yazılım Mühendisliği1[ 3.hft ]. Yazılım Mühendisliği2 Yazılım İ sterlerinin Çözümlemesi Yazılım Yaşam Çevrimi “ Yazılım Yaşam çevrimin herhangi bir yazılım.>")
 Hazırda Bekletme (Hibernate) Oturum Kapatma (Log Off) Bilgisayarı Kapat (Shut.>")