Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
Bölüm V SCADA

2
5.1. SCADA NEDİR? Proses (İşlem), Endüstriyel ve Bina Otomasyonunda kullanılan Programlanabilir Kontrolörler (PLC), Döngü Kontrolörleri, Dağıtık Kontrol Sistemleri (DCS), I/O Sistemleri ve akıllı sensörler (kontrol ünitesi üzerinde bulunan) gibi çeşitli cihazlardan saha verilerini sürekli ve gerçek zamanlı olarak toplayan, tanımlanan kıstaslara göre bu bilgileri değerlendirmeye tabi tutup gerektiğinde kullanıcıya erken uyarı mesajları üreten, üretimi etkileyen çeşitli etkenlerin merkezi bir noktadan grafiksel veya trend olarak gözetlenmesini sağlayan ve sahadaki kontrol noktalarının uzaktan denetlenebilmelerine imkan sağlamak amacıyla kullanılan sistemler Denetleyici Gözetim ve Veri Toplama (SCADA “Supervisory Control and Data Acquisition”) sistemi olarak tanımlanabilir. “Supervisory Control and Data Acquisition” ifadesi 1960’larda Bonneville Power Administration tarafından ortaya atılmış bir terimdir. “Supervisory Control and Data Acquisition” terimi ilk olarak PICA (Power Industry Computer Applications) konferansında 1973’te yayınlanmıştır.
, Endüstriyel ve Bina Otomasyonunda kullanılan Programlanabilir Kontrolörler (PLC), Döngü Kontrolörleri, Dağıtık Kontrol Sistemleri (DCS), I/O Sistemleri ve akıllı sensörler (kontrol ünitesi üzerinde bulunan) gibi çeşitli cihazlardan saha verilerini sürekli ve gerçek zamanlı olarak toplayan, tanımlanan kıstaslara göre bu bilgileri değerlendirmeye tabi tutup gerektiğinde kullanıcıya erken uyarı mesajları üreten, üretimi etkileyen çeşitli etkenlerin merkezi bir noktadan grafiksel veya trend olarak gözetlenmesini sağlayan ve sahadaki kontrol noktalarının uzaktan denetlenebilmelerine imkan sağlamak amacıyla kullanılan sistemler Denetleyici Gözetim ve Veri Toplama (SCADA Supervisory Control and Data Acquisition ) sistemi olarak tanımlanabilir. Supervisory Control and Data Acquisition ifadesi 1960’larda Bonneville Power Administration tarafından ortaya atılmış bir terimdir. Supervisory Control and Data Acquisition terimi ilk olarak PICA (Power Industry Computer Applications) konferansında 1973’te yayınlanmıştır.")
3
SCADA sistemi, veri toplama ve telemetri (kablosuz veri aktarma)’nın bir kombinasyonudur. Veri toplama ve merkezden veri gönderme, analiz yapma ve daha sonra bu verilerin bir operatör ekranında gösterilmesi işlevlerini gerçekleştirir. SCADA sistemi saha ekipmanlarını görüntüler ve aynı zamanda denetler. SCADA sistemleri; sistem operatörlerine (kullanıcılarına), merkezi bir kontrol noktasından geniş bir coğrafi alana petrol ve gaz alanları, boru sistemleri, su şebekeleri, termik ve hidrolik enerji üretim sistemleri ile iletim ve dağıtım tesisleri gibi alanlarda vanaları, kesicileri, ayırıcıları, elektrik makineleri, motor, elektronik, elektrohidrolik ve elektropnömatik valfler anahtarları uzaktan açıp kapama, ayar noktalarını değiştirme, alarmları görüntüleme, ısı, nem, frekans, ağırlık, sayı, elamanların durumları gibi ölçü bilgilerini toplama işlevlerini güvenilir, emniyetli ve ekonomik olarak yerine getirme avantajı sunmaktadır. Burada, mekanik ve elektronik aygıtlar arabirimlerle bağlanarak işletme fonksiyonlarını yürütürler. Denetim komutları bu düzeyde tesisin çalışmasını sağlayan elektriksel sinyallere ve makine hareketlerine dönüşür, bu dönüşümler elektronik algılayıcılar aracılığıyla toplanır. Toplanan veriler elektrik işaretlerine çevrilerek SCADA sistemine aktarılır. Aktüatörler, tahrik motorları, vanalar, lambalar, hız ölçü cihazları, yaklaşım detektörleri, sıcaklık, kuvvet ve moment elektronik algılayıcıları burada bulunur.
, merkezi bir kontrol noktasından geniş bir coğrafi alana petrol ve gaz alanları, boru sistemleri, su şebekeleri, termik ve hidrolik enerji üretim sistemleri ile iletim ve dağıtım tesisleri gibi alanlarda vanaları, kesicileri, ayırıcıları, elektrik makineleri, motor, elektronik, elektrohidrolik ve elektropnömatik valfler anahtarları uzaktan açıp kapama, ayar noktalarını değiştirme, alarmları görüntüleme, ısı, nem, frekans, ağırlık, sayı, elamanların durumları gibi ölçü bilgilerini toplama işlevlerini güvenilir, emniyetli ve ekonomik olarak yerine getirme avantajı sunmaktadır. Burada, mekanik ve elektronik aygıtlar arabirimlerle bağlanarak işletme fonksiyonlarını yürütürler. Denetim komutları bu düzeyde tesisin çalışmasını sağlayan elektriksel sinyallere ve makine hareketlerine dönüşür, bu dönüşümler elektronik algılayıcılar aracılığıyla toplanır. Toplanan veriler elektrik işaretlerine çevrilerek SCADA sistemine aktarılır. Aktüatörler, tahrik motorları, vanalar, lambalar, hız ölçü cihazları, yaklaşım detektörleri, sıcaklık, kuvvet ve moment elektronik algılayıcıları burada bulunur.")
4
SCADA sisteminden verilen komutlar, bu katmanda, elektrik işaretlerine çevrilerek, gerçek dünyada istenen hareketlerin oluşması sağlanır (vanaların açılıp-kapanması, ısıtıcıların çalıştırılıp-durdurulması gibi). SCADA sistemi, hidroelektrik, nükleer güç üretimi, doğalgaz üretim ve işleme Tesislerinde, gaz, yağ, kimyasal madde ve su boru hatlarında pompaların, valflerin ve akış ölçüm ekipmanlarının işletilmesinde, kilometrelerce uzunluktaki elektrik aktarım hatlarındaki açma kapama düğmelerinin kontrolü ve hatlardaki ani yük değişimlerinin dengelenmesi gibi çok farklı alanlarda kullanılabilmektedir. Sistemin işletilmesinde salt insan çabası yetersiz kalmaktadır. Sistemde meydana gelecek olayların anında tespit edilmesi klasik yöntemler ile mümkün olmamaktadır. Sistemin daha etkin işletilmesi için, daha güvenilir, daha ekonomik işletme için işletmede bilgisayar otomasyonuna gereksinim vardır. Bunun için sistem kontrol ve izleme yazılımları gerçekleştirilmiştir. Yazılım sayesinde operatörler bilgisayar ekranında ki sistem diyagramından sistemi uzaktan kumanda edebilecektir. Arızaların algılanması yerlerinin tespiti ve arızanın giderilmesi yine uzaktan kumandalı olarak belli bir merkezden yapılabilecektir. Sistemle ilgili alarm sinyalleri operatörleri uyaracak şekilde oluşturulması ve görüntülenmesi gerçekleştirilebilecektir.

5
Çeşitli veriler tarih ve zaman olarak (arıza şekli, arıza yeri) veri tabanı şeklinde saklanabilir böylelikle kişilere bağlı kalmaksızın sistem hakkında toplanan verilere dayalı ayrıntılı bilgi edinilmesi sağlanabilecektir. Dinamik grafik çizim araçları kullanılarak izlenmesi istenen süreç gerçeğe çok yakın bir şekilde canlandırılabilmekte ve alarmlar çarpıcı hale getirilebilmektedirler. SCADA yazılımları kendi bünyelerinde bulunan çekirdek yazılımları kullanılarak grafiklerle birlikte hareket, boyutlandırma, yanıp sönme ve doldurma, boşaltma gibi operatörlerin dikkatini çekip kullanım kolaylığı sunabilecek özellikleri içermektedirler. Operatörlerin görmesini kolaylaştıracak değişik renk, boyut ve şekillerde alarm hazırlamak ve alarm durumunda alınacak acil tedbirleri ekranda göstermek mümkün olmaktadır. Klasik denetleyicilerle olduğu gibi modern SCADA sistemlerini kullanım sırasında da elle kontrol yapabilmek için grafik tetikleyicileri olarak adlandırılan yazılım parçaları kullanılmaktadır. Herhangi bir tesiste olabilecek olan otomatik kontrol sistemlerinin kullanıcılar tarafından tek bir ekran üzerinden yönlendirilebilmesi çok arzu edilen bir durumdur. Bu sayede kullanıcıların sistemlerini yönetmeleri için, sistemin bulunduğu yere gitme zorunluluğu ortadan kalkmış ve kontrol müdahalelerini bulundukları yerde bilgisayarlar üzerinden vererek büyük kolaylıklar sağlanmış olur.

6
5.2. Scada Sisteminin Uygulama Alanları
SCADA sisteminin birçok kullanım alanı vardır. Geniş bir coğrafi alana yayılmış,bölgesel ve yerel tesislerin bir çoğunda kullanılmaktadır. SCADA sisteminin başlıca kullanım alanları; Kimya Endüstrisi, Doğalgaz ve Petrol Boru Hatları, Petrokimya Endüstrisi, Elektrik Üretim ve İletim Sistemleri, Elektrik Dağıtım Tesisleri, Su Toplama Arıtma ve Dağıtım Tesisleri, Hava Kirliliği Kontrolü, Çimento Endüstrisi, Otomotiv Endüstrisi, Bina Otomasyonu, Proses Tesisleri… Türkiye’de birçok scada uygulamasına rastlamak mümkündür. Örneğin İstanbul metrosunda bulunan yürüyen merdivenler, havalandırma fanları, aydınlatma sistemi, yangın ihbar ve koruma sistemleri ve enerji dağıtım sistemleri tamamen bilgisayarlarla izlenebilmekte ve gerekli müdahaleler merkezi kontrol ünitesinden yapılmaktadır.

7
Bolu’daki deprem konutlarının elektrik dağıtım sistemlerinde de scada sistemi kullanılmıştır
Botaş’ ın doğal gaz hatlarında, TEK elektrik üretim ve dağıtımında, Ankara, İstanbul, Kayseri gibi bazı kentlerde Su ve Kanalizasyon İdarelerinin su depolarında, pompa istasyonlarında ve ölçüm noktalarının kontrolünde scada sistemleri kullanılmaktadır. İzmit’te 1999 Ağustos’unda yaşanan depremde SCADA sayesinde doğalgaz şebekesinde herhangi bir problem görülmemiştir. SCADA kontrol odasından şebekedeki ana çelik vanalar hemen otomatik kapatılmış, 27 adet bölge regülatörü de eşzamanlı olarak durdurulmuş ve vana odaları görevlilerince kapatma işlemlerinin kontrolü de yapılarak tüm sistemin gaz akışı kesilmiştir.

9
Algılayıcılar (Sensörler)
Bölüm VI Algılayıcılar (Sensörler)
")
10
6.1. Giriş Robotlar her geçen gün daha da gelişmektedirler. Bunun sonucunda da daha zeki ve akıllı hale gelmişlerdir. Robotları zeki hale getiren teknoloji algılama işlemlerini gerçekleştiren sensör teknolojisindeki gelişimlerdir. Robotların kendi içerisindeki mesafe ve konumlama sensörleri robotun aldığı mesafeyi ve verilen komutlara cevaplarını kontrol eder. Harici algılayıcılarsa robotların çalıştıkları alandaki iş parçalarını gözlemler. Gözlem sensörlerinin temelinde lazer mesafe sensörleri vardır(aşağıdaki şekil). Bu sensör bir kaynak robotuna monte edilmiştir. Robotun hareketinden ziyade ne kadar kaynak yapıldığını kontrol etmektedir.
. Bu sensör bir kaynak robotuna monte edilmiştir. Robotun hareketinden ziyade ne kadar kaynak yapıldığını kontrol etmektedir.")
11
Aşağıdaki şekilde ise lazer tarayıcı görülmektedir
Aşağıdaki şekilde ise lazer tarayıcı görülmektedir. Bu tarayıcının özelliği ölçümlerini çizgisel değil de alansal yapması, yüzeyi komple kontrol etmesidir. Bu işlem bir kamera tarafından da yaptırılabilir ancak lazer tarayıcının özelliği lazerin özelliğine bağlı olarak yapılan kaynağın üç düzlemde de kontrolünü yapabilme özelliğine sahip olmasıdır. Yani derinlemesine kaynağın iş parçası içerisinde ki derinliğini ölçerek standartlara ve güvenlik şartlarına uygunluk kontrol edilmektedir. Bu tip uygulamalar bu gün özellikle su ve hava taşıtları için basınç altında çalışan taşıtlarda mecburi güvenlik şartıdır. Otomotiv sektöründe de yakıt depolarının güvenilirliği yine bu algılama sensörlerince sağlanır. İnsanların yapacağı kaynak hataları engellenmiş üretilen bütün mamullerin güvenilirliği bu şekilde sağlanmıştır.

12
Aşağıdaki şekilde sensörlerin genel olarak çeşitleri yer almaktadır
Aşağıdaki şekilde sensörlerin genel olarak çeşitleri yer almaktadır. Temelde basit ve karışık olmak üzere iki guruba ayrılırlar. Güç, mesafe ve sıcaklık ölçümleri için kullanılan basit sensörler şunlardır: Güç ölçümünde çok basit olarak bir kontaktör ve yaydan oluşmuş anahtarlar, mesafe ölçümünde potansiyometreler, sıcaklık ölçümünde de NTC elemanları.

13
SENSÖRLER (ALGILAYICILAR) BASİT AKILLI DOKUNSAL GÖRSEL DUYUŞSAL GÜÇ MESAFE SICAKLIK KONUM GÖRÜNTÜ TANIMA SES TANIMA

14
SENSÖRLER TEMASLI TEMASSIZ OPTİK NON-OPTİK PROBLAR PIN MATRİKS
GÜÇ/MOMENT KONUM IŞIK BARIER YANSIMA LAZER MESAFE LAZER TARAMA KAMERA ULTRASONİK ENDÜKTİF KAPASİTİF

15
Kompleks akıllı sensörler ise güç ölçümünde strain gauges ve piezo malzeme, konum ve mesafe ölçümünde lazerli algılama ve tarayıcılardır. Dijital kameralar ise robotlu montaj ünitelerinde yaklaşım ve tanıma işlevini gerçekleştirmektedir. Diğer bir akıllı sensör ise ses tanıma sensörleridir. Yapılarına göre sensörler ise sağdaki şekilde tanımlandırılmıştır.

16
Robot Sensörleri Sensörler duyularımız gibi bir sistemin çevresini algılamasını sağlayan elemanlardır. Örneğin görme duyumuz olan gözlerimizin yerini mobil robotlarda ışık sensörleri (LDR, kamera…) alır. Biz de mobil robotlarda dış dünyayı algılatmak için sensörleri yani algılayıcıları kullanıyoruz.
 alır. Biz de mobil robotlarda dış dünyayı algılatmak için sensörleri yani algılayıcıları kullanıyoruz.")
18
Sensör Çeşitleri Mekanik dokunma dokunma, çarpma sensörleri (Duyargalar) Eğim & Denge sensörleri Basınç sensörleri Işık sensörleri (LDR, fotodiyot, fototransistör, IR, CMUcam kamera), Ses sensörleri (mikrofon, ses tanıma, ultrasonik)
, Ses sensörleri (mikrofon, ses tanıma, ultrasonik)")
19
Uzaklık sensörleri Posizyon sensörleri (optik encoderlar, Resolverlar, Potansiyometreler) Elektronik pusulalar, GPS navigasyon, hareket sensörleri UV sensörler Isı sensörleri Nem sensörleri, vs…

20
Mekanik Sensörler (Duyargalar)
Sensörler kategorisindeki en basit sensördür. Çalışma prensibi açma-kapama anahtarlarıyla aynıdır. Genellikle yaylı bir sistem engele çarpınca kontakt kapanır ve elektrik iletimi sağlanır

22
Çıkışı ya elektrik var ya da elektrik yok şeklinde olduğu için dijital bir sensör olarak düşünebiliriz. Swtichler, butonlar bu tür bir mekanik sensör için kullanılabilir

23
Eğim & Denge Sensörleri
Bu tür sensörler robotunuzun yüzeyle yaptığı açıyı algılayabilir. Bu işlemlerde elektronik olarak Gyro (Jiroskop, sol fotoğrafta yer alıyor) ve mekanik algılama olarak da cıvalı kontakt sensörleri kullanılabilir.
 ve mekanik algılama olarak da cıvalı kontakt sensörleri kullanılabilir.")
25
Gyroların çıkışları açıya göre analog voltaj ya da özel bir sinyal atımıdır. Sinyal atımının genliği ölçülerek sensörün bağlı olduğu sistemin zeminle açısı saptanabilir

26
Tilt Sensörleri Bu sensörler de denge sensörleri gibidir, farklarıysa açısal olarak algılamak yerine anlık çarpmaları ya da sağa, sola, 90 derece ve üstü açılardaki eğilmeleri algılamarıdır. Çıkışları tilt var tilt yok şeklinde yani dijitaldir

28
İvme Ölçerler (Accelerometer’ler)
Son zamanlarda kullanım alanları gittikçe artan bir sensör türüdür. Bir yönde hareketle oluşan ivmeyi elektriksel sinyallere çevirirler

30
En yaygın kullanım alanları cep telefonlarımız (oynadığınız yarış oyunlarını düşünün). Cep telefonlarını, telefonu sağa sola çevirdiğimizde oluşan küçük ivmeleri farkedip, mikro denetleyicisinde işler

31
Basınç & Kuvvet & Yük (Load cell) Sensörleri
Bu sensörler belirli bir kuvveti ölçmek amacıyla kullanılırlar. Örneğin bu sensörlerin kullanım alanlarından biri ve en yaygını dijital terazilerdir. Terazilerde yer alan yük sensörleri kuvvete bağlı gerilmeyle direnç değiştirirler.

32
Bu çok küçük direnç değişimleri hassas devrelerle algılanarak ağırlığa çevrilir. 3 sensör için de benzer iç yapılar geçerlidir.

33
Pozisyon Sensörleri (Optik, Manyetik Encoder – Resolver – Potansiyometreler)
Pozisyon sensörleri hareketli bir sistemin pozisyon (konum) bilgisini almamızı sağlarlar. En basitiyle başlayalım. Potansiyometreler belli bir aralıkta ayarlanabilen dirençlerdir. Bu direnci üstünde yer alan çubukla değiştirebiliriz
 bilgisini almamızı sağlarlar. En basitiyle başlayalım. Potansiyometreler belli bir aralıkta ayarlanabilen dirençlerdir. Bu direnci üstünde yer alan çubukla değiştirebiliriz.")
34
Eklem kısmında çubuğu ekleme bağlayarak açıyla değişen bir direnç elde ederiz. Encoderlar da genel olarak üç tiptir. Basit tek kanal encoderlar, İki yada üç kanallı artımsal (incremental) encoderlar ve çok kanallı mutlak (absolute) encoderlar. Encoderların çıkışı dijital kare sinyaldir. Kullanmak oldukça basittir.
 encoderlar ve çok kanallı mutlak (absolute) encoderlar. Encoderların çıkışı dijital kare sinyaldir. Kullanmak oldukça basittir..")
35
Sonraki fotoğrafta tek kanallı optik encoder’a sahip bir dc motor modeli görebilirsiniz. Encoder motorun arkasına bağlanır ve motorun her bir turunda belirli adette sinyal çıkartır

38
Sayıcı devreleri ya da mikrodenetleyiciler bu encoder sinyallerini sayarak motorun kaç tur attığını çok hassas bir şekilde bulabilir. Gelişmiş enkoderlarda yarık dahi bulunabilmektedir.

39
Bu da çok daha hassas verilere ulaşmamızı sağlar (2000 yarıklı bir encoderın hassasiyeti 360/2000 = 0,18 derece’dir).
.")
40
Resolverlar (Sincos’lar)
Encoder’ların bir üst basamağı olarak düşünebiliriz. En sık olarak endüstriyel motorlarda kullanılırlar. Encoderlara benzemekle beraber iç sistemleri tamamiyle farklıdır ve tabi çıkışları da

41
Resolverlara dışarıdan bakıldığında görünüş olarak dc motora çok benzerler. Rotor (Dönen kısım) ve statordan oluşurlar.
 ve statordan oluşurlar..")
42
Motordan farkıysa, Resolverların rotoru da, statoru da bobinlerden oluşur. Robot bobinine belirli frekans ve voltajda (genellikle AC akım 400hz – 26V gibi) akım uygulanır
 akım uygulanır.")
44
Rotorun statorla yani sabit kısımla yaptığı açıya göre arada oluşan manyetik alan bir transformatör yaratır, tabi bu trafo çıkışı bobin açısına göre değişir. Bir bobinden girilen voltajın sinus foksiyonu çıkar, öteki bobinden cosinus çıkışı çıkar. Aşağıdaki grafikten inceleyebilirsiniz.

45
Vr Voltajını verdiğimiz bobin ana (primary) bobindir
Vr Voltajını verdiğimiz bobin ana (primary) bobindir. Dönen bobini bir demir çekirdek yardımıyla elektrikler. Dönen bobinin(rotary coil) diğer sabit iki bobine (cos winding – Sin winding) yaptığı açıya göre çıkış voltajları değişir.
 bobindir. Dönen bobini bir demir çekirdek yardımıyla elektrikler. Dönen bobinin(rotary coil) diğer sabit iki bobine (cos winding – Sin winding) yaptığı açıya göre çıkış voltajları değişir.")
47
Çıkışlar: Vs: Vr x Sin (bobin açısı) Vc: Vr x cos (bobin açısı) Şeklindedir.
 Vc: Vr x cos (bobin açısı) Şeklindedir.")
48
Motor Hız Sensörleri (Takometreler, takojeneratörler)
Bu sensör tipleri motorun arkasına takılır motorun hızına göre analog bir voltaj çıkartırlar. Analog voltaj motor hızına göre doğru orantılıdır.

49
Basit kullanımlıdır. Solda yer alan fotoğrafta maxon motora bağlı bir takojeneratör modeli görebilirsiniz. Takojeneratör aynı bir bisiklet dinamosu gibi çalışmaktadır.

51
Pusulalar, GPS Sistemleri
Arazi robotu gibi hareketli projelerde kullanılan sensörlerdir. Elektronik pusulalar robotun yönünü bulmasında kullanılırken, GPS devreleri çok daha hassas şekilde robotun içinde bulunduğu koordinatları da bulmasını sağlar.

52
Akım Sensörleri Bu tür sensörlerin amacı üzerlerinden geçen akımı ölçmektir. Bazı devreler için hayati önem taşıyan bir sensör türüdür. Allegro serisinden ACT240 – ACT245 gibi modeller, ACS756 ve INA139 gibi entegreler akım ölçümü için uygundur.

53
Genellikle bu sensörlerin çıkışları akımla orantılı voltaj çıkartır
Genellikle bu sensörlerin çıkışları akımla orantılı voltaj çıkartır. Başka bir tür akım sensörü de toroid bobin tipi akım sensörleridir, bu sensörler yalnızca frekanslı akımı (alternatf akım ya da pwm sinyali) gibi algılayabilirler.
 gibi algılayabilirler.")
55
Akım geçen kablo bu tür sensörlerin merkezindeki delikten geçer, frekanslı akım manyetik alan yaratır ve sensör çıkışlarından AC voltaj çıkar. Akım şiddeti arttıkça AC voltaj da artar

56
.Basit bir akım sensörü olarak da çok küçük ohm değerine sahip yüksek watt’lı taş dirençler kullanılabilir. Bu dirençlerde üzerlerinden geçen akımla orantılı olarak direnç üzerinde voltaj düşümü yaratacaklardır

58
Işık Sensörleri Robot kontrolünde en yaygın kullanılan sensör ailesidir. LDR, fototransistör, fotodiyot, infrared dedektörler gibi. Görünen veya görünmeyen ışık bilgilerini kullanan tüm sensörler bu kategoride yer alır.

59
LDR Işık Sensörleri LDR’ler (Light Dependent Resistor) ışık yoğunluğuna göre direnci değişen devre elemanlarıdır. Kolay kullanımlı analog sensörlerdir. LDR’ler (Yaygın halk deyimi ile “fotoseller”) genellikle kadmiyum sülfidden (CdS) yapılmıştır.
 ışık yoğunluğuna göre direnci değişen devre elemanlarıdır. Kolay kullanımlı analog sensörlerdir. LDR’ler (Yaygın halk deyimi ile fotoseller ) genellikle kadmiyum sülfidden (CdS) yapılmıştır.")
61
LDR’lerin devreye bağlanışı herhangi bir direnç gibidir
LDR’lerin devreye bağlanışı herhangi bir direnç gibidir. Direnç değerleri birkaç kohm’dan megaohm seviyelerine değişebilir.

62
Fototransistorler – Fotodiyotlar
Bu ışık algılayan elektronik devre elemanlarını da ışık sensörü olarak kullanabilirsiniz. LDR’lere göre en büyük avantajları hızlı tepki süreleridir.

63
Fototransistorler üzerlerine düşen ışık yoğunluğuna göre baz bacaklarına güç verirler; böylece ışıkla orantılı olarak emiter’den daha fazla akım çıkar

64
Fotodiyotlardaysa diyot üzerine düşen ışık belli bir değeri aştığında diyot iletime geçer. Fotodiyotlar da genellikle LED kılıfındadır.

65
Renk Sensörleri Renklerin belirli ışıkları belli oranlarda yansıtmaları temel alınarak yapılmış sensörlerdir. Algılama rengine göre belirli bir voltaj çıktısı verilebilir. En yaygın renk sensörü entegresi Taos TCS230 modelidir.

67
Kızılötesi Sensörler İnfrared sensör grubu da çok geniştir. Bu tür sensörler cisim algılama ya da iletişim için kızılötesi (infrared) sensörleri kullanırlar. Kızılötesi kullanılmasının en önemli sebebi, görünür ışık tayfından kaçınmaktır. Bu şekilde dedektörler (ışın algılayıcılar) daha kararlı çalışırlar.
 sensörleri kullanırlar. Kızılötesi kullanılmasının en önemli sebebi, görünür ışık tayfından kaçınmaktır. Bu şekilde dedektörler (ışın algılayıcılar) daha kararlı çalışırlar.")
68
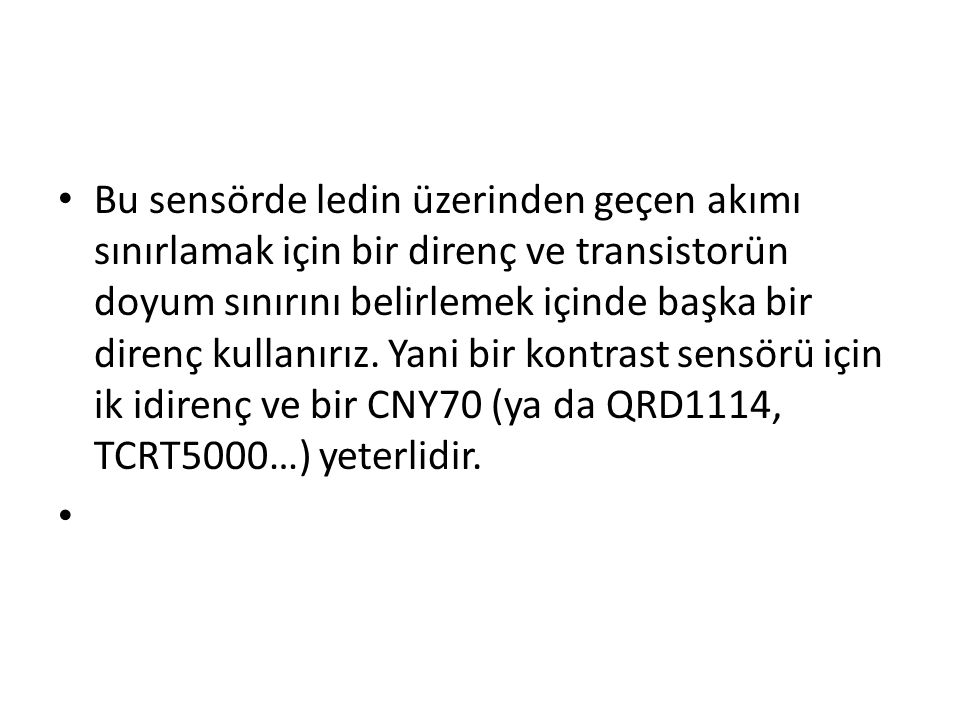
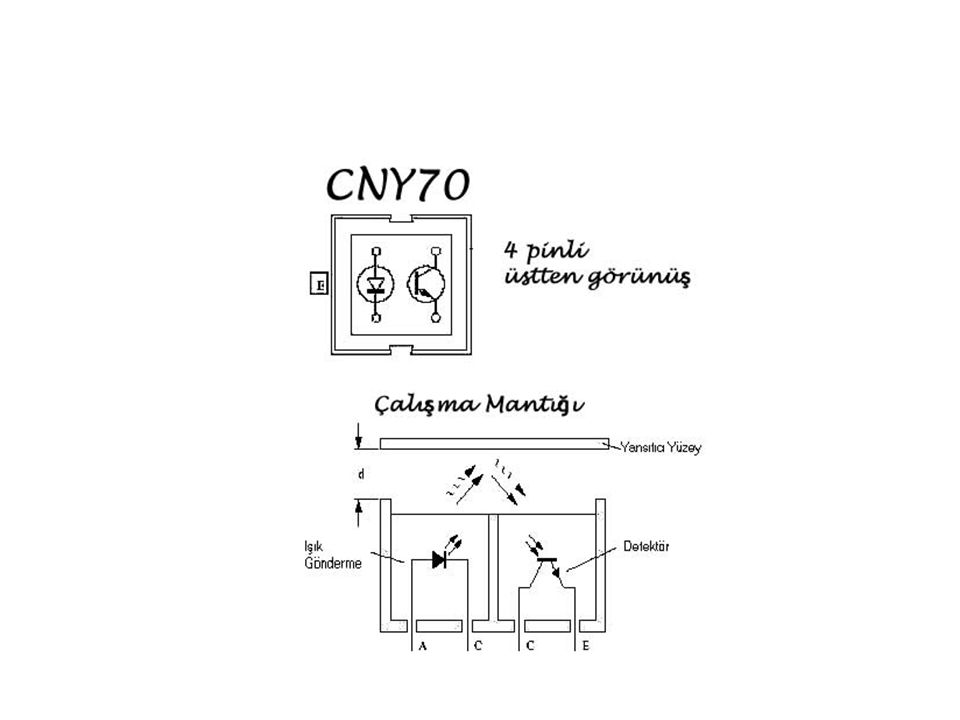
Yansımalı ve Yarıklı Optoküplörler (Kontrast algılayıcı Sensörler)
CNY70, QRD1114, TCRT5000 gibi optoküplörler yansımalı optoküplör ailesindendirler. Bu sensörlerin asıl kullanım amacı iki ayrı devreyi birbirleriyle ışık yoluyla haberleştirmektir. Biz de robotikte bu sensörleri kontrast algılaması için kullanıyoruz.

70
Sonraki şekilde grafikte CNY70 sensörünün çalışma mantığı gösterilmiştir. Siyahla beyaz rengin ışığı yansıtıp yansıtmaması kuralına göre fototransistor iletime geçer ya da geçmez

72
Bu sensörde ledin üzerinden geçen akımı sınırlamak için bir direnç ve transistorün doyum sınırını belirlemek içinde başka bir direnç kullanırız. Yani bir kontrast sensörü için ik idirenç ve bir CNY70 (ya da QRD1114, TCRT5000…) yeterlidir.
73
UV Morötesi Sensörler Morötesi ışınımı algılamak için kullanılırlar. Yangın sensörü olarak da kullanılabilirler (Ateş yüksek oranda morötesi ışık da yayar). Analog voltaj çıkartırlar, karşılaştırıcı entegreleri kullanlarak (LM324, Lm339, Lm358 gibi…) mikrodenetleyiciyle kontrol edilebilir.
. Analog voltaj çıkartırlar, karşılaştırıcı entegreleri kullanlarak (LM324, Lm339, Lm358 gibi…) mikrodenetleyiciyle kontrol edilebilir.")
74
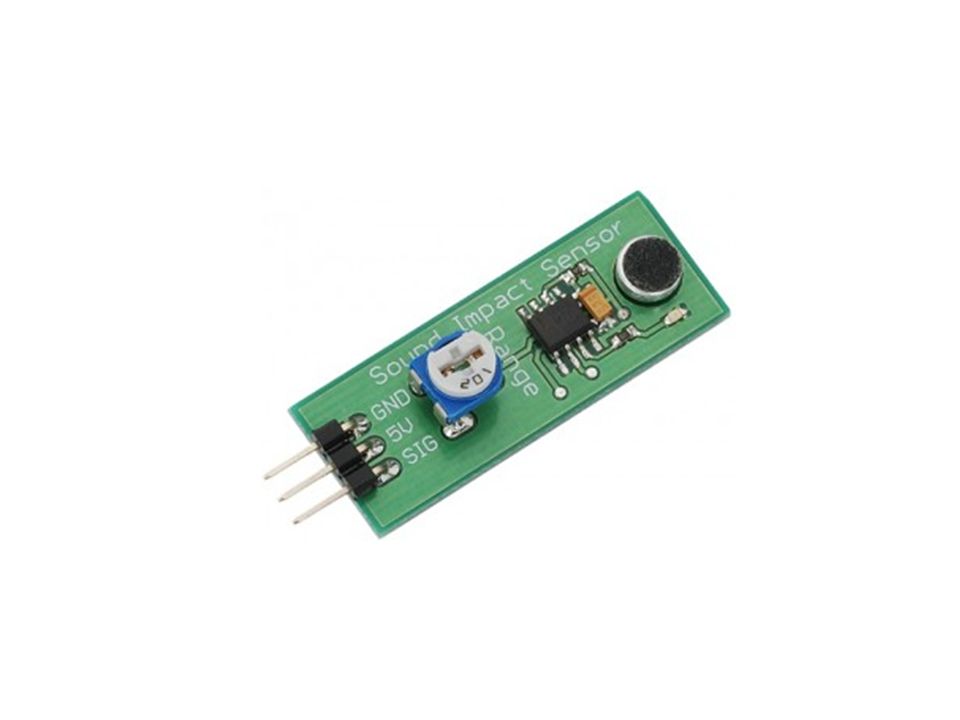
Ses Sensörleri Temelinde bir mikrofon (ses algılayıcı) ve mikrofondan çıkan sesleri güçlendiren (ses amfisi) devreleri barındıran bir sensör çeşididir. Ortamdaki ses seviyesi belirli bir sınırın üzerine çıktığında çıkış verirler. Sınır seviyesi genellikle devrelerinde yer alan trimpotlarla ayarlanabilir.
 ve mikrofondan çıkan sesleri güçlendiren (ses amfisi) devreleri barındıran bir sensör çeşididir. Ortamdaki ses seviyesi belirli bir sınırın üzerine çıktığında çıkış verirler. Sınır seviyesi genellikle devrelerinde yer alan trimpotlarla ayarlanabilir.")
76
Ultrasonik Sensörler Sesle engel tanıma veya uzaklık ölçümü ultrasonik (ses ötesi) ses dalgaları ile yapılabilir. Ultrasonik sensör çevresine ses dalgaları yayıp , engele çarpıp geri gelen yankı dalgalardan menzil ölçümü yapan bir algılayıcı türüdür.
 ses dalgaları ile yapılabilir. Ultrasonik sensör çevresine ses dalgaları yayıp , engele çarpıp geri gelen yankı dalgalardan menzil ölçümü yapan bir algılayıcı türüdür.")
78
Menzilleri diger sensörlere göre çok daha fazladır
Menzilleri diger sensörlere göre çok daha fazladır. Bir IR sensör en fazla 2m ölçebilirken, ultrasonik sensorler uygun koşullarda, 30 metreye kadar ölçebilir

79
Ultrasonik sensörlerin en önemli kullanım alanları menzil ölçümü istenen mobil & kaşif robot projeleridir. Sonraki şekildeki sensor Devantech SRF04′tür

Benzer bir sunumlar






















 ve KIZILÖTESİ ALGILAYICILAR>")









