Sunuyu indir
Sunum yükleniyor. Lütfen bekleyiniz

1
Yrd.Doç.Dr. Mustafa Doğan
PID Denetleyiciler Yrd.Doç.Dr. Mustafa Doğan

3
Genel Terimlerin Tanımları
Aşma(Overshoot): Yükselme Süresi(Rise Time): Durulma süresi(Settling Time): Kalıcı Durum Hatası(Steady-State Error):
: Yükselme Süresi(Rise Time): Durulma süresi(Settling Time): Kalıcı Durum Hatası(Steady-State Error):")
4
PID nedir? P Oransal (Proportional) I Tümlev (Integral) D Türev (Derivative)
 I Tümlev (Integral) D Türev (Derivative)")
5
Proportional(Oransal) Mod
P: Oransal mod, çıkış sinyalini denetleyicinin girişiyle doğru orantılı olarak ayarlar. sapma

6
Integral (Tümlev) Modu
I: Tümlev modu istenilen değerle (setpoint) işlemin çıkışı arasında oluşan sapmaları (hata) düzeltir.
 işlemin çıkışı arasında oluşan sapmaları (hata) düzeltir.")
7
Derivative (Türev) Modu
D: Türevsel modun kullanılmasının asıl amacı , oransal denetimde oluşan aşırı yükselmeleri azaltmaktır. sapma

8
Azalır Artar Yok olur KAPALI DÖNGÜ TEPKİSİ YÜKSELME ZAMANI AŞMA
DURULMA SÜRESİ KALICI DURUM HATASI KP artışı Azalır Artar Az değişir KI artışı Yok olur KD artışı

9
PID Denetleyici tasarlarken istenilen cevabı elde etmek için izlenicek adımlar
Sistemin açık döngü cevabı elde edilir ve nelerin geliştirilebileceği tanımlanır. Yükselme zamanını geliştirmek için “Oransal Denetim” eklenir. Aşmayı geliştirmek için “Türevsel Denetim” eklenir. Kalıcı durum hatasını yok etmek için “Tümlev Denetimi” eklenir. İstenilen sistem cevabı elde edilene kadar KP, Ki ve Kd değerleri ayarlanır.

10
PI ve PD Denetleyiciler
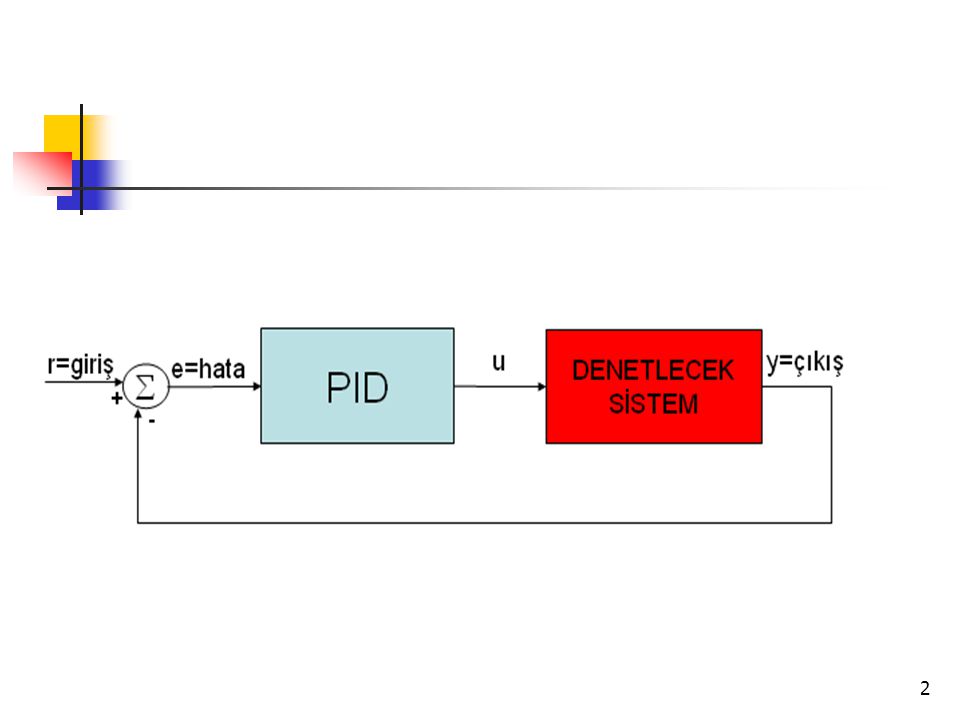
PID Denetleyicilerin Genel Denklemi: u(t): Giriş Sinyali e(t): Hata Sinyali e(t)=r(t) – y(t) r(t): Referans Sinyali y(t): Çıkış Sinyali
: Giriş Sinyali. e(t): Hata Sinyali e(t)=r(t) – y(t) r(t): Referans Sinyali. y(t): Çıkış Sinyali.")
11
PI ve PD Denetleyiciler
Kp: Oransal Kazanç K =Kp/Ti: Tümlev kazancı Kd =Kp*TD: Türevsel kazanç Kp: Oransal Kazanç Ti: Tümlev zaman sabiti Td: Türev zaman sabiti

12
PI ve PD Denetleyiciler
PI Denetleyici PD Denetleyici

13
P Denetleyici GPID=KP Açık Döngü Aktarım işlevi: Kp
s^3 + 3 s^2 + 3 s + 1

14
P Denetleyicinin Simulink Benzetimi

15
Açık Döngü Aktarım İşlevi:
PI Denetleyici Açık Döngü Aktarım İşlevi: KI/s + KP s^3 + 3 s^2 + 3s +1 GPID=KP+KI/s Kapalı Döngü Cevabı

16
PI Denetleyicinin Simulink Benzetimi

17
Açık Döngü Aktarım İşlevi:
PD Denetleyici Açık Döngü Aktarım İşlevi: Kp + Kd*s s^3 + 3 s^2 + 3s +1 Kapalı Döngü Cevabı GPID=Kp +Kd *s

18
PD Denetleyicinin Simulink Benzetimi

19
Hız Sabitleyici(Cruise Control)
b*v (Sürtünme) u m v v u: motorun uyguladığı kuvvet(N) b: sürtünme katsayısı(Nsec/m) m: arabanın kütlesi(kg) v: arabanın hızı dv/dt: ivme Sistemin denklemi;
 u. m. v. v. u: motorun uyguladığı kuvvet(N) b: sürtünme katsayısı(Nsec/m) m: arabanın kütlesi(kg) v: arabanın hızı. dv/dt: ivme. Sistemin denklemi;")
20
Sistemin Simulink Çizimi ve Açık Döngü Cevabı

21
Sisteme PI Denetleyici Eklendikten Sonra

22
Kapalı Döngü Cevabı

Benzer bir sunumlar